«
Изобретение относится к геодезическому приборостроению и быть использовано в качестве устройства для юстировки и поверки измерителей угла наклона и параметров движения.
Целью изобретения является повышение точности установки подвижного основания устройства и поверяемого объекта на границе раздела положительных и отрицательных углов наклона.
На фиг. 1 приведена кинематическая схема предлагаемого устройства; на фиг. 2 - взаимосвязь конструктивных элементов устройства (съемньй элемент регулировочного узла не показан); на фиг. 3 - вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг„ 2.
Устройство содержит шарнирный че- тырехзвенник 1, образованный подвижным основанием 2, неподвижным основанием 3, двумя плечами 4 и четырьмя шарнирами 5 внутреннего трения, каждый из которых представляет собой пе ремычку 6, образованную двумя радиусами 7. На подвижном основании устройства установлен испытываемый объект 8. Привод подвижного основани.ч 2 состоит из эксцентриковой втулки 9, установленной на оси 10, связанной с подвижным основанием 2. Эксцентриковая втулка 9 соединена с качалкой 11 , которая связана с кронштейном 2 через шарнир 13 внутреннего трения„ Жесткость соединения эксцентриковой втулки 9 с качалкой 11 регулируется винтом 14. Кронштейн 12 связан с неподвижным основанием 3 через кинематическую связь, образованную посредством дополнительной эксцентриковой втулки 15, установленной в пазу 16 кронштейна 12 и на штифте 17 неподвижного основания 3. Указанная кинематическая связь обеспечивает возможность начальной подрегулировки положения подвижного основания. Винты 18 служат для жесткой фиксации кронштейна 2 после подрегулировки.
Регулировочный узел 19 эксцентриковой втулки выполнен в виде одноступенчатой зубчатой передачи, состоящей из съемного элемента 20, снабженного зубчатой трибкой 21 и установочным пальцем 22, входящшч в отверстие 23 качалки 11. Трибка 21 имеет соединение с зубчатым колесом 24, которым снабжена эксдентркковая втулка 9. Дпя визуального опредале769072
НИН направления максимального значения эксцентриситета е эксцентриковой втулки 9 зубчатое колесо 24 имеет отверстие 25.
5 На фиг. 1 обозначены местная вертикаль ZZ ; угол d. наклона подвижного основания 2 относительно горизонта; длина И плеч 4; расстояние t между шарнирами подвижного основания
10 2; расстояние L между шарнирами неподвижного основания 3; величина ли- нейного перемещения t оси 10 эксцентриковой втулки 9 вместе с подвижным основанием 2.
(5 Устройство в юстировочном варианте работает следующим образом.
Перед установкой юстируемого объекта 8 производят начальную регулировку устройства, т.е. систему шар20 мирного четырехзвенника приводят в положение геометрической симметрии по форме правш- ьной трапеции. Для этого эксцентриковую втулку 9 (фиг.1) поворачивают на 360 с помощью съем35 ного элемента 20 и замеряют макси- г- альное значение непараллельности основания 2 основанию 3 в крайних положениях, например, с помощью измерительной головки типа 1МКМ с
30 ценой деления 0,001 мм. Разницу показаний устраняют поворотом дополнительной эксцентриковой втулки 15 при ослабленных винтах 18, которая при этом посредством паза 16 пово5J рачивает кронштейн I2 относительно неподвижного основания 3 вокруг штифта 17 и через качгшку 11, эксцентриковую втулку 9 к ось 10 производит подрегулировку положения основания
40 2 относительно основания 3. После этого винты 18 затягивают и фикси- руют например, краской. Затем экс- центриков)То втулку 9 поворачивают до исходного положения, при котором
45 технологическое отверстие 25 зубча- того колес а 24 займет верхнее, поло- «ение. Устройство готово к работе.
При юстировке объект 8, например акселерометр, устанавливают на под2Q вижное основание 2 и закрепляют. Подключают чувствительный элемент объекта к измерительной аппаратуре и поворачивают съемный элемент 20 (до- бкза-ются нулевых показаний чувстви22 тельного злемента). При повороте элемента 20 происходит поворот экс- центркковой втулки 9 вокруг оси Ю - апз гмер, по -- асоной стралке как показано на фиг, i , При этом длина ка чалки 11 увеличивается на величину I e.sin, где Y угол поворота эксцентриковой втулки 9. В результате ось 10 смещает подвижное основа- ние 2 влево на величину t, что нарушает симметрию четырехзвенника и вызьшает наклон подвижного основания на угол oi . При поворотах элемента 20 по часовой и против часовой стрелки изменяются величина и знак наклона подвижного основания, в результата чего можно быстро и точно получить нулевой сигнал на выходе объекта, .
Разрешающая способность устройства к его Точность определяются соотношением равноваликих плеч 4 и расстояниями между базовыми концами подвижг ого основания 2 и неподвижного основания 3, а также стабильность этих параметров устройства.
Зависимость угла наклона подпиж- ного основания 2 от величины его нейного смещения определяется по
формуле:
Si..(m+t) -/H -(in-t fl- где m ().2 при перемегденик основания 2 по закону прямого маятника и по формуле:
Sind((m+t)(m-t ))L ,
где я(Ь-1).2 , при перемещении основания по закону обратного маятника.
При использовании устройства в качестве прибора для поверки измерителей угла наклона эксцентриковую втулку снабжают шкалой, расчет которой можно выполнить по. указанным формулам.
з 10 ss
20
25
30
5
0
С целью ум.еньшенИя влияния изменений температуры окружающей среды на точность работы устройства подвижное бснование 2, неподвижное основание 3 и равновеликие плечи 4 изготавливают из целого куска материала, например из ситалла.
Изобретение обеспечивает повышение точности установки подвижного основания на границе раздела положительных и отрицательных углов наклона, а также возможность задания отрицательных и положительных углов наклона относительно горизонтальной оси.
Формула изобретения
Устройство для задания и регулируемого изменения угла наклона вь1пол- ненное в виде шарнирного четырехзвенника, образованного подвижным и неподвижным основаниями, шарнирно соединенными между собой посредством равновеликих плеч, непараллельных между собой, и снабженное приводом подвижного основания,-о т л и ч а ю- щ е е с я тем, что, с целью повышения точности установки подвижного основания на границе раздела положительных и отрицательных углов наклона относительно прямой, проходящей через шарнирны неподвижного основания , привод подвижного основания выполнен в виде оси, закрепленной на подвижном основании, эксцентриковой втулки, установленной на оси и снабженной регулировочным узлом, и качалки, шарнирно соединенной с кронштей-- ном, установленным на неподвижном основании, причем эксцентриковая втулка подвижно связана с качалкой.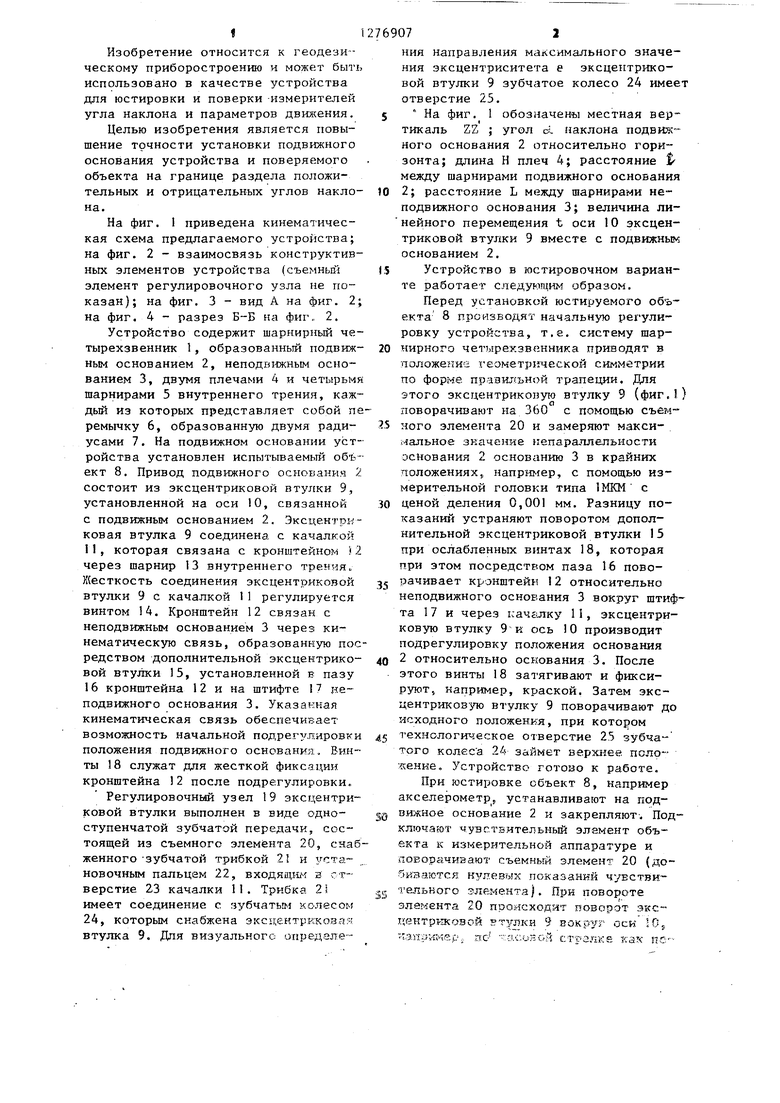

| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочное устройство | 1990 |
|
SU1760515A1 |
| Юстировочное устройство | 1983 |
|
SU1142806A1 |
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| Устройство для выставки преимущественно акселерометров | 1982 |
|
SU1064206A1 |
| Юстировочное устройство | 1987 |
|
SU1492340A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ СФЕРИЧЕСКОЙ ФОРМЫ | 2003 |
|
RU2276046C2 |
| Юстировочное устройство | 1989 |
|
SU1732316A1 |
| Юстировочное устройство | 1989 |
|
SU1700515A1 |
| Устройство для хромирования наружных поверхностей деталей | 1990 |
|
SU1737030A1 |
Изобретение относится к геодезическому приборостроению и позволяет повысить точность установки подвижного основания на границе раздала положительных и отрицательных углов наклона относительно прямой, проходящей через шарниры неподвижного основания. Устройство содержит шариир- ь ьй четырехзвенник, образованный подвижным 2 и неподвижным 3 основаниями, двумя плечами 4 и шарнирами 5 внутреннего трения. Привод подвижного основания 2 представляет собой эксцентриковую втулку 9, установлен- кую на оси 10 и связанную подвижно с качалкой 11. При юстировке объекта поворотом эксцентриковой втулки 9 съемным элементом по и против часовой стрелки изменяют величину и знак наклона подвижного основания 2, добиваясь нулевого сигнала на выходе объекта. 4 ил. (Л го О5 СО 
Фаг 3
6-Б
ФтЛ
Редактор А. Лежнина
Составитель Ю. Межуев
Техред И.Попович Корректор. Л. Патай ,
Заказ 6656/32Тираж 670Подписное.
ВНРШГШ Государственкого комитета СССР
по делам изобретений :; -; открытий 113035, Москва, Н-35, Раушская каб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгъ рс ;, ул. Проектная, k
| Грейм И.А | |||
| Оптические отсчетные системы в приборостроении и машиностроении | |||
| М - Л.: Наука, 1963, с.25 | |||
| Артоболевский И.И | |||
| Механизмы в совремеиной технике, т | |||
| I | |||
| Рычажные механизмы | |||
| М.: Наука, 1970, с.398. |
