ff 9
(Л
lu со to
00
4:
Изобретение относится к точно приборостроению и может быть использовано для прецизионного ориентирования объектов по двум взаимно пер- пендикулярн ым направлениям, например, оптических элементов, источнико направленного , фотоприемников, ультразвуковьсх концентраторов, силочувствительных приборов и других объектов, требующих высокой точности наведения, надежности и удобства эксплуатации.
Целью изобретения является повышение точности регулировки и улучшение удобства эксплуатации.
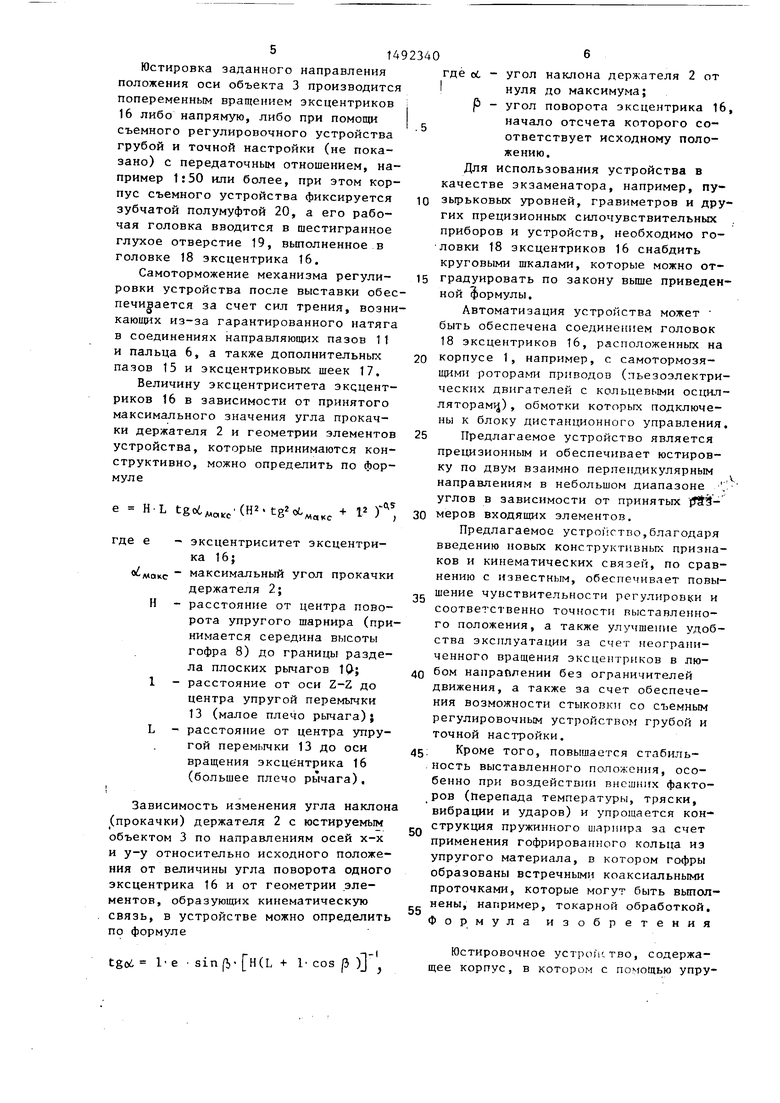
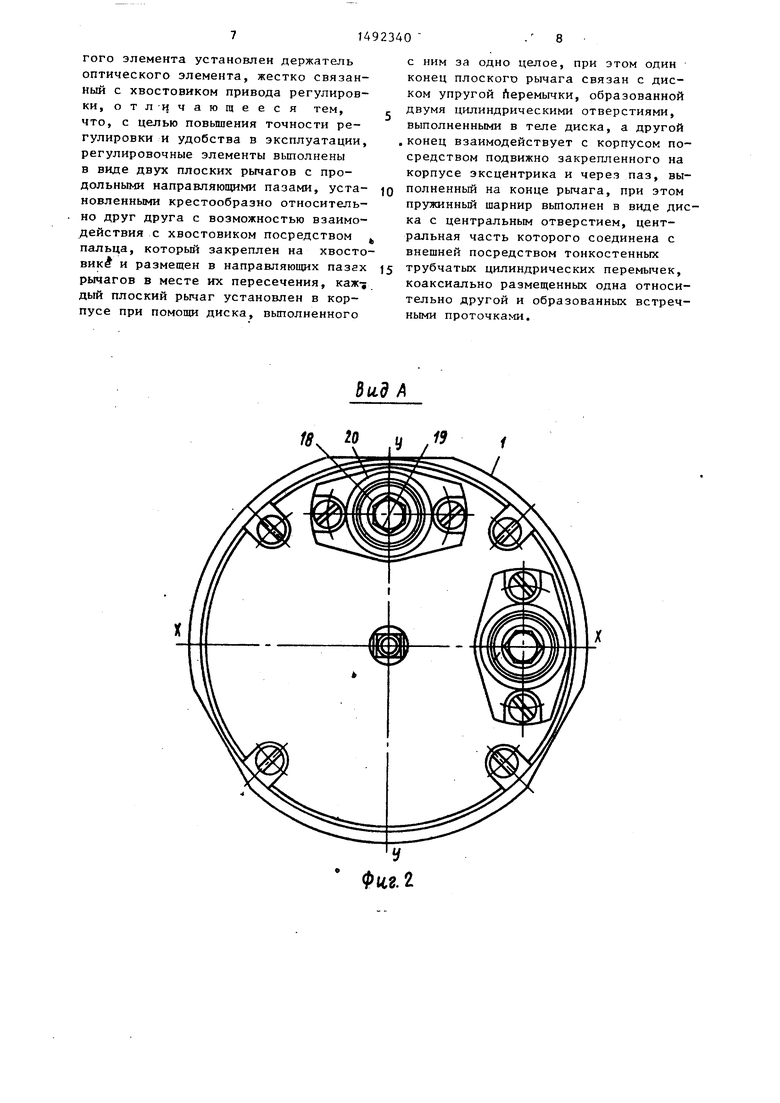
На фиг, 1 показана конструкция юстировочного устройства; на фиг.2 - вид А на фиг, 1; на фиг, 3 - разрез Б-Б на фиг, 1 ,
Устройство содержит корпус 1, держатель 2, юстируемый объект 3, регулировочный элемент 4, хвостовик 5, палец 6, гофрированное кольцо 7, гофр 8, коаксиальную проточку 9, плоский рычаг 10, продольный направляющий паз 11, диск 12, упругую перемычку 13, цшп1ндрическое отверстие 14, дополнительный паз 15, эксцентрик 16, эксцентриковую шейку 17, головку 18, глухое шестигранное отверстие 19, зубчатую полумуфту 20, одностороннюю лыс ку 21 (ось наведения, местная вертикаль) .
Юстировочное устройство содержит корпус 1, упруго установленный на нем держатель 2 с юстируемым объектом 3, например оптическим элементом и регулировочные элементы 4, Держатель 2 снабжен хвостовиком 5 (например, выполненным с ним за одно целое с укрепленным на нем пальцем 6 и ус- в корпусе 1 посредством пру
тановлен
жинного шарнира, выполненного в виде гофрированного кольца 7, гофры 8 которого образованы встречными коаксиальными проточками 9, Регулировочные элементы 4 выполнены в виде двух плоских рычагов 10, которые снабжены продольными направляющими пазами 11 и крестообразно установлены относительно друг друга с возможностью взаимодействия с хвостовиком 5 посредством пальца 6, который размещен в пазах 11 в месте их пересечения. Кажды плоский рычаг 10 установлен в корпусе 1 при помощи диска 12, выполненного с ним за одно целое. Контуры рычага 10 образованы из тела диска 12 и
между ними оставлена связь в виде упругой перемьгчки 13, образованной двумя цилиндрическими отверстиями 14, Свободный конец рычага 10 снабжен дополнительным пазом 15 и выполнен с возможностью взаимодействия с корпусом 1 посредством эксцентрика 16, который подвижно закреплен на корпусе 1 и его эксцентриковая шейка 17 размещена в дополнительном пазу 15, Головка 1-8 эксцентрика 16 снабжена шестигранным глухим отверстием 19 и подвижно закреплена на корпусе t при помощи зубчатой полумуфты 20, Шестигранное глухое отверстие 19 и зубчатая полумуфта 20 предусмотрены для установки и сцепления с рабочими органами съемного регулировочного устройства грубой и точной настройки, например, с передаточным отношением
5
0
5
0
5
0
5
1:30 и более,
С целью уменьшения зоны контактирования пальца 6 со стенками направляющих пазов 11, в последних сняты односторонние лыски 21, а рьмаги Ю обращены этими лысками 21 в противоположные стороны. Для устранения люфта в этом соединении, а также в соединении дополнительных пазов 15 с эксцентриковыми шейками 17 предусмотрена посадка с гарантированным натягом , в пределах упругой деформации материала плоских рычагов 10,
Работа устройства основана на преобразовании вращательного движения одного из эксцентриков 16 в качатель- ное движение соответствующего плоского рычага 10 вокруг центра упругой перемычки 13, Плоский рычаг 10 при этом выполняет роль рычага второго рода и передает качательное движение пальцу 6 и соответственно через хвостовик 5 наклоняет держатель 2 с юстируемым объектом 3 в заданном направлении.
Перед началом работы необходимо устройство привести в исходное положение . ;
Исходным положением устройства является такое положение, при котором точка пересечения осей продольных на- правляюш х пазов 1 1 совпадает с осью Z-Z, и соответственно палец 6 находится в центре пересечения, а максимальные значения эксцентриситетов .е эксцентриков 1б направлены от центра пересечения О,
Юстировка заданного направления положения оси объекта 3 производится попеременным вращением эксцентриков 16 либо напрямую, либо при помощи съемного регулировочного устройства грубой и точной настройки (не показано) с передаточным отношением, например 1:50 или более, при этом корпус съемного устройства фиксируется зубчатой полумуфтой 20, а его рабочая головка вводится в шестигранное глухое отверстие 19, выполненное в головке 18 эксцентрика 16.
Самоторможение механизма регулировки устройства после выставки обес печи ается за счет сил трения, возникающих из-за гарантированного натяга в соединениях направляющих пазов 11 и пальца 6, а также дополнительных пазов 15 и эксцентриковых шеек 17.
Величину эксцентриситета эксцент- риков 16 в зависимости от принятого максимального значения угла прокачки держателя 2 и геометрии элементов устройства, которые принимаются конструктивно, можно определить по формуле
е H.L tgotMa.e CH tgZo + Р Г
где е - эксцентриситет эксцентрика 16;
максимальный угол прокачки держателя 2;
расстояние от центра поворота упругого шарнира (принимается середина высоты гофра 8) до границы раздела плоских рычагов
1 - расстояние от оси Z-Z до центра упругой перемычки 13 (малое плечо рычага);
L - расстояние от центра упругой перемычки 13 до оси вращения эксцентрика 16 (большее плечо рычага),
Зависимость изменения угла наклон (прокачки) держателя 2 с юстируемым объектом 3 по направлениям осей х-х и у-у относительно исходного положения от величины угла поворота одного эксцентрика 16 и от геометрии элементов, образующих кинематическую связь, в устройстве можно определить по формуле
tgoi е sin (Ь- H(L + cos р )
МО КС
Н
0
5
0
5
0
5
0
5
0
5
где оС. - угол наклона держателя 2 от I нуля до максимума;
Р - угол поворота эксцентрика 16, начало отсчета которого соответствует исходному положению.
Для использования устройства в качестве экзаменатора, например, пузырьковых уровней, гравиметров и других прецизионных силочувствительных , приборов и устройств, необходимо головки 18 эксцентриков 16 снабдить круговыми шкалами, которые можно отградуировать по закону вьш1е приведенной формулы.
Автоматизация устройства может быть обеспечена соединением головок 18 эксцентриков 16, расположенных на корпусе 1, например, с самотормозящими poTopaNm приводов (пьезоэлектрических двигателей с кольцевыми осцил- ляторам), обмотки которых подключены к блоку дистанционного управления.
Предлагаемое устройство является прецизионным и обеспечивает юстировку по двум взаимно перпендикулярным направлениям в небольшом диапазоне углов в зависимости от принятых меров входящих элементов.
Предлагаемое устройство,благодаря введению новых конструктивных признаков и кинематических связей, по сравнению с известным, обеспечивает повышение чувствительности регулировки и соответственно точности выставленного положения, а также улучшение удобства эксплуатации за счет неограниченного вращения эксцентриков в любом напраплении без ограничителей движения, а также за счет обеспечения возможности стыковки со съемным регулировочным устройством грубой и точной настройки.
: Кроме того, повышается стабильность выставленного положения, особенно при воздействии внешних факторов (перепада температуры, тряски, вибрации и ударов) и упрощается конструкция пружинного и1ариира за счет применения гофрированного кольца из упругого материала, в котором гофры образованы встречными коаксиальными проточками, которые могут быть выполнены, например, токарной обработкой. Формула изобретения
Юстировочное устройство, содержащее корпус, в котором с помощью упруV
того элемента установлен держатель оптического элемента, жестко связанный с хвостовиком привода регулировки, отл ичающееся тем, что, с целью повышения точности регулировки и удобства в эксплуатации, регулировочные элементы выполнены в виде двух плоских рычагов с продольными направляющими пазами, уста- новленными крестообразно относительно друг друга с возможностью взаимодействия с хвостовиком посредством пальца, который закреплен на хвосто вик# и размещен в направляющих пазах рычагов в месте их пересечения, каж дый плоский рычаг установлен в корпусе при помощи диска, выполненного
с ним за одно целое, при этом один конец плоского рычага связан с диском упругой Леремычки, образованной двумя цилиндрическими отверстиями, выполненными в теле диска, а другой ,конец взаимодействует с корпусом посредством подвижно закрепленного на корпусе эксцентрика и через паз, выполненный на конце рычага, при этом пружинный шарнир выполнен в виде диска с центральным отверстием, центральная часть которого соединена с внешней посредством тонкостенных трубчатых цилиндрических перемычек, коаксиально размещенных одна относительно другой и образованных встречными проточками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочное устройство | 1985 |
|
SU1318967A1 |
| Юстировочное устройство | 1989 |
|
SU1622869A1 |
| Юстировочное устройство | 1986 |
|
SU1401426A1 |
| Юстировочное устройство | 1989 |
|
SU1700515A1 |
| Юстировочное устройство | 1983 |
|
SU1142806A1 |
| Юстировочный модуль | 1990 |
|
SU1727102A1 |
| Юстировочное устройство | 1989 |
|
SU1732316A1 |
| Устройство для юстировки приборов | 1988 |
|
SU1783504A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| Прецизионная регулируемая опора | 1991 |
|
SU1799906A1 |
Изобретение относится к области точного приборостроения. Работа юстировочного устройства основана на преобразовании вращательного движения одного из эксцентриков 16 в качательное движение соответствующего плоского рычага 10 вокруг центра упругой перемычки 13. Плоский рычаг 10 при этом выполняет функцию рычага второго рода, передает качательное движение пальцу 6 и соответственно через хвостовик 5 наклоняет держатель 2 с юстируемым объектом 3 в заданном направлении. Юстировочное устройство является прецизионным и обеспечивает юстировку по двум взаимно перпендикулярным направлениям в небольшом диапазоне углов в зависимости от принятых размеров входящих элементов. 3 ил.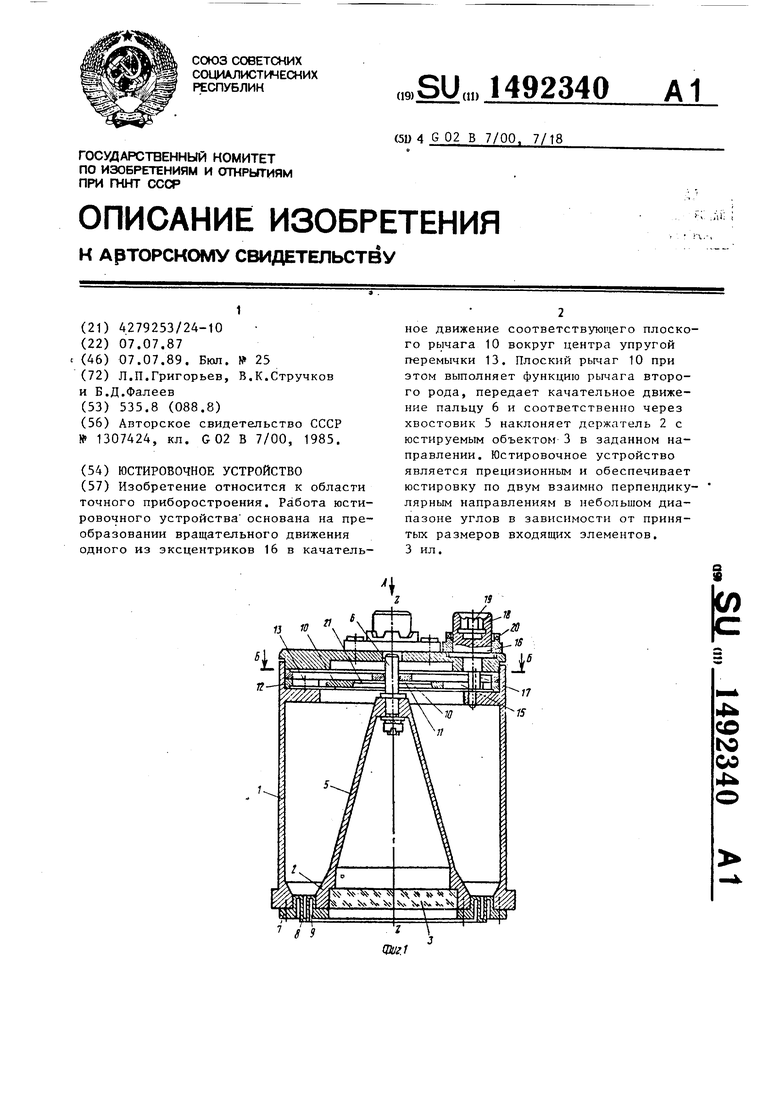
f8 20 у /5
Ви,д А
ф14г.2
15
11
21
Фиг.З
| Устройство для регулировки угла наклона оптического элемента | 1985 |
|
SU1307424A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
