И.юбретение относится к антомагическо- му регулированию и может быть исиользо- iiuMo при исследовании и иалалке различных автоматических систем.
Цель изобретения - повышение точности устройства Д.ЛЯ измерения времени запаздывания инерционного объекта.
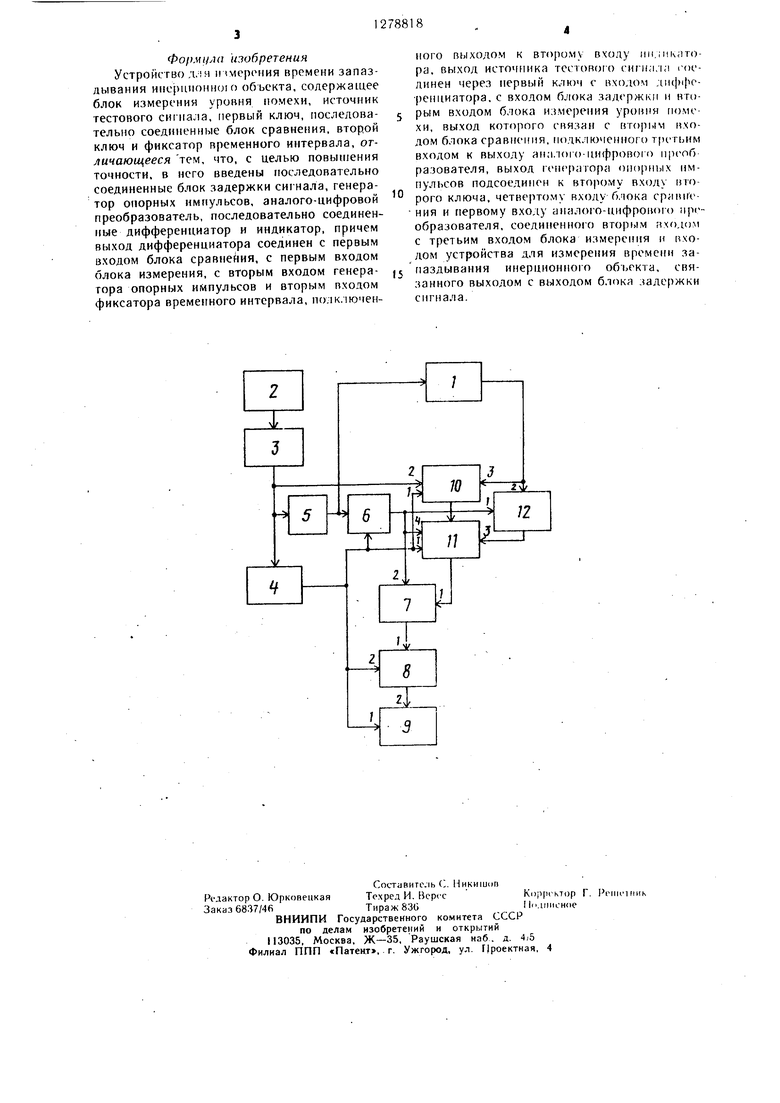
На чертеже изображена структурная схе- .ма ycTpOHCTtsa.
На оеме обозначены исследуемый объект 1, источник 2 тестового сигнала, ключ 3, дифференциатор 4, блок 5 задержки сигнала, reHep, JTOp 6 опорных имнул1)сов, ключ 7, фиксатор 8 временного интервала, индикатор 9, блок 10 изме|)ения уровня помехи, блок 11 сравнения и аналого-цифровой преобразователь 12.
В качестве исследуемого обьекта 1 может использоваться 1иирокий класс систем автоматического управления (например,гидравлические и электрические следянше систе- ), а также их отдельные блоки.
Фнксато) 8 временных интервалов выполнен в виде двоичного счетчика прямого счета на статических триггерах, включенных последовательно. Индикатор 9 предназначен для воспроизведения информации, записанном на триггерах фиксатора 8, и представляет собой светодиодный индикатор. Ьлок И) измерения уровня помехи выполнен на базе цифрового вольтметра для измерения максимально1 0 значения переменного напряжения и предназначен для измерения максимального уровня помехи в выходном сигнале об ьекта. В блоке 10 осуществляется вычисление действуюп1его значения помехи по форму.че нриб. 1иженн(;го интегрирования
У -л/-1 Х у- (а,),(И
где У (а;) - значения выходного сигналл обьекта в дискретные моменты времени;
п - число точек измерения. Затем в блоке 10 осун1ествляется вымис ление максимального уровня помехи но формуле
Y, . (Ч)
Блок 11 нреднлзначен для сравнения величин сигналов, н(к тупаюп1их на ею BTopoii и третий входы, и содержит входные триг- герные регистры, вентили и триггеры yii- равления.,В случае, когда сигнал на третьем входе больн е сигнала на втором входе, на вцходе блока 11 формируется сигнал.
Устройство работает следующим образом.
При замыкании ключа 3 сигнал носго- яиного положительного уровня поступает на второй вход блока 0 измерения и запускает его. Блок управления, входящий в состав блока 10, начинает вырабатывать ун- равляюн1ие импульсы, которые определяют
порядок работы блока 10 в течение нскито рого промежутка времени, и вычисляется максимальное значение помехи но формулам (1) и (2). Результат измерения запис1)1вается в выходном счетчике блока 10, который приходит в ждущее состояние. При замыкании ключа 3 сигПал с выхода источника 2 через блок 5 поступает на второй вход генератора G опорных имнульсов, который начинает работать. Временная задержка, реализуемая блоком 5, выбирается большей, чем промежуток времени, в течение которого работает блок 10 (например, 2--3 с). Одновременно ступенчатый сигнал поступает на вход исследуемого I, который начинает отрабатывать его. По сигналам, вырабатываемым генератором 6, начинают работать фиксато В, блок 11 и нреббразова- тгль 12,
Сигнал, вырабатываемый на выходе фиксатора 8, пропорционален текущему времени с момента подачи ступенчатого сигнала на вход обт.екта I. На входы блока 11 носту- пают сигналы, соответствующие максимальному измеренному уровню помехи, и сигнал с выхода объекта I. Когда выходной сигнал объекта 1 превын1ает уровень помехи, на выходе блока 11 формируется (игнал, но которому размыкается ключ 7, и останавливается фиксатор 8 временного интервала на предпоследнем отсчете. Промежуток
времени, зафиксированный в его ьыходном 1егистре соответствует измеренному времени чисто1 () запаздывания и высвечивается на табло индикатора 9. На этом процесс измерения заканчивается.
Для приведения устройства в исходное
состояние необходимо разомкнуть ключ 3, при этом сигнал отрицательного уровня (преобразованший дифференциатором 4 в им- нульс) поступает на обиуляюнше входы блоков 6, 8-11 и возврангает их в начальное состояние {на имнульс ноложительной
полярности указапные б,чоки устро11ства не реагируют).
Таким образом, нредлаг аемос устройство позволяет определят) величину чис101Ч) .заназ- .чываиия различных динамических об ьектов более точно, чем и: .в1Ч тп| 1е устройства, ко- ropiiie становятся Г1рактич(Ч кн щфаботосгю- соПными в условиях действия нг)мсх в Biiixoa- liDM cHi iia.ae . Эю достигается путем пр(мг,;фи1 е. 1ьного определения максима, 1ьно- | | уровня помехи и затем определения
промежутка времени, при котором выходной об1)Скта превысит его. При достаточ- 1И1 в.1с(жой частоте работы цифровых блоков устройсгна (ЮкГц) максимальная О1пиб- ка не нревьинает периода одного дискрета. Проведенные исследования нокачьшают, что
при испо.1ьзовании П)еллагаемог1) устройства точность измерения чпсихо i;i:i.i3.ibiBa- ния инсрционно1-о () c i u4-TH H h) во растает.
Фo| мliлa изобретения Устройство ,4, i я 1пмерония времени запаздывания инорцпонною объекта, содержащее блок измерения уровня помехи, источник тестового сигнала, первый ключ, последовательно соединенные блок сравнения, второй ключ и фиксатор временного интервала, отличающееся тем, что, с целью повышения точности, в него введены последовательно соединенные блок задержки си1-нала, генератор опорных импульсов, аналого-цифровой преобразователь, последовательно соединенные дифференциатор и индикатор, причем выход дифференциатора соединен с первым входом блока сравнения, с первым входом блока измерения, с вторым входом генератора опорных импульсов и вторым входом фиксатора временного интервала, полключеи
НОГО выходом к второму входу HH.illKJlTOра, выход источника тостоног о сигиллл ctw- динен через первый ключ с входом ди(|)фс- ренциатора, с входом блока задержки и вторым входом блока измерения уроння помг- хи, выход которого связан с вторым FSXO- дом блока сравнения, подключенного третьим входом к выходу аналого-цифровою iip(o6 разователя, выход генератора опорных импульсов подсоединен к второму входу второго ключа, четвертому входу б.юка cp iiuiv- ния и первому входу анало|-о-цифр01К)го преобразователя, соединенного вторым пходом с третьим входом блока измерения и пхо- дом устройства для измерения времени запаздывания инерцнонного обьекта, связанного выходом с выходом блока задержки сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2010 |
|
RU2447464C1 |
| Устройство для контроля объектов | 1990 |
|
SU1725233A1 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Устройство для измерения чистого запаздывания инерционного звена | 1984 |
|
SU1236430A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ СЕТЕЙ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2026561C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ ЭЛЕКТРИЧЕСКОГО СИГНАЛА С ПОВЫШЕННОЙ ПОМЕХОУСТОЙЧИВОСТЬЮ | 2010 |
|
RU2477492C2 |
| Способ определения технического состояния двигателей внутреннего сгорания и устройство для его осуществления | 2018 |
|
RU2721992C1 |
| Устройство для контроля параметров объектов | 1989 |
|
SU1695270A1 |
Изобретение относится к автоматическому регулированию и может быть.использовано при исследовании и наладке различных автоматических систем. Цель изобрете-. ния - повышение точности устройства для измерения времени запаздывания инерционного объекта. Поставленная цель достигается за счет того, что существенно уменьт шается воздействие помех, содержащнхсй в выходном сигнале объекта за счет предварительного определения максимального уровня помехи и определения промежутка времени, при котором выходной сигнал превысит этот уровень. I ил. с « to 00 00
| Дехтяренко П | |||
| И., Коваленко В | |||
| П | |||
| Определение характеристик звеньев систем .автоматического регулирования | |||
| - М.: Энергия, 1973 | |||
| Смеляков В | |||
| В | |||
| Цифровая измерительная аппаратура инфранизких частот | |||
| - М.: Энергия, 1975, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1978 |
|
SU694839A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
