11377826
Изобретение относится к автоматике, а именно х технике измерения параметров передаточных функций линейных динамических звеньев систем автоматизированного управления, и может быть использовано для определения параметров линейных динамических звеньев, широко применяемых в разK;(Yu, -Y;)+Ki(,4, ) + ..., ... ,+К i (Y,j., ., ) - (Y,; „ -Y,; ) (3)
Вычисленные коэффициенты, удовлетворяющие равенству (3), есть коэффициенты уравнения
Р( А) дЧк, +,...,-fK;., Л-t-K;, (4)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров передаточной функции линейного динамического объекта | 1988 |
|
SU1585782A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Устройство для определения параметров динамического звена | 1987 |
|
SU1478194A1 |
| Устройство для измерения чистого запаздывания инерционного звена | 1984 |
|
SU1236430A1 |
| Устройство для определения коэффициента усиления динамического объекта | 1984 |
|
SU1211700A1 |
| Устройство для определения параметров динамического звена второго порядка | 1984 |
|
SU1231489A1 |
| Устройство для определения параметров объекта | 1987 |
|
SU1446602A1 |
| Анализатор частотных характеристик | 1985 |
|
SU1307373A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство для определения параметров линейных динамических объектов | 1991 |
|
SU1837259A1 |
Изобретение относится к способам экспериментального определения динамических характеристик звеньев и систем автоматического управления и устройствам для их осуществления. Способ обеспечивает автоматическое определение порядка и структуры исследуемого объекта, а затем определение параметров злементарных звеньев. Способ заключается в измерении выходного с 1гнала звена через равные интервалы времени после подачи на вход тестового ступенчатого сигнала и получении разностей двух соседних значений измеренного сигнала и последующем определении порядка и параметров передаточной функции звена путем решения систем алгебраических уравнений, коэффициенты которых связаны с параметрами передаточной функ- ции звена. Для выполнения указанных ; операций в устройство введены блок задания данных, блок переключателей, блок формирования разностных сигналов, коммутатор, счетчик, импульсный генератор и вычислитель, выполненный на базе микропроцессора. 2 с.п. ф-лы, 12 ил. € (Л оо ч1 00 ю Од
личных отраслях промьшшенности при исследовании и наладке систем автоматизации.
Цель изобретения - расширение области применения.
Дпя этого через равные промежутки времени л с момента подачи тестовог сигнала на вход исследуемого объекта фиксируются 2 п+1 значений переходной функции объекта, где п - предполагаемый порядок искомой передаточной функции звена, jit; выбирается из соотношения
Л-о
-пр
(1),
пр
ТЪ - время переходного процесса с
25
Т 2Э
Ь7 Cs
где С, (arccos (+ (IJK (5 „(t
)
(6
последующим вычислением потенциальных Д5азностных сигналов для двух соседних значений Y;-Y; i , которые
последовательно подаются на шину дан-30 к,; вычисляются для каждой пары ных вычислительного устройства. В вычислительном устройстве, увеличивая значение индекса i на единицу от 1 до п, составляются и решаются после35
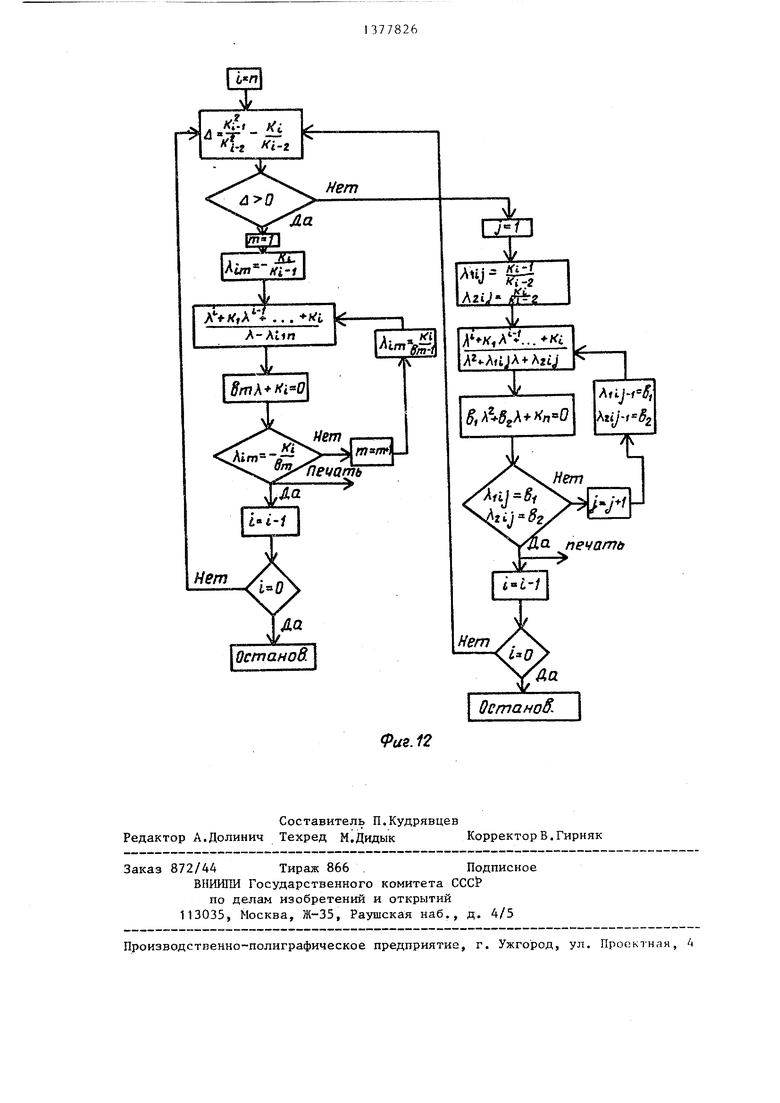
комплексно сопряженных корней многочлена (4) по формулам
довательно системы уравнений
-2Re г
,(s
2Э
1
(Y,-Yo)+K(,)-(Y3-Yz), K,{Y,-Yo)-fKj(Y,(Y,-Y2)
К, (Y -Y;) -HK ,(Y, -Y, ) -(,) ,
(2)
f K,(Y,-YO)+K,,(YI-Y,)+,.«.
-K;(Y;-Y,., )-(Y,, -Y;) K,(Y.,-Y,)-i-Ka(Y,-Y,i) + ,...
-HK(YU,-Y,-)-(,, )
K,(Y;-Y;., )+KI(Y;V, -Y;),.
.t, KjvY5J, ) -
(Y,; -Y,i., )
После решения каждой системы значений найденных вспомогательных коэффициентов К,, К,..., подставляются в П1к,идерочное уравнение
W(p)
а значение индекса i равно порядку - искомой передаточной функции звена, корни уравнения (4). связаны с параметрами передаточной функции звена
К
ri (Т, )ff (.Р
J.1 J 5.. 5 (5)
следующими формулами:
т - TM - )
J
,где
п 1
- вещественные корни многочлена
Т 2Э
Ь7 Cs
(6)
где С, (arccos (+ (IJK (5 „(t
)
к,; вычисляю
к,; вычисляются для каждой пары
комплексно сопряженных корней многочлена (4) по формулам
; вычисляются для
-2Re г
,(s
2Э
1
К- (ке-л) (J, )
Все приведенные уравнения, реализующие предложенный способ, были получены в результате отображения решений непрерывных дифференциальных уравнений, соответствующих передаточной функции (5), наблюдаемые в дискретные моменты времени через интервалы на соответствующие им дискретные уравнения. При этом можно показать, что для рассматриваемого класса объектов связь между дискретными и непрерывными уравнениями осуществляетск с помощью коэффициентов К,,,..,К. Из приведенных соотношений непосредственно следует способ определения порядка и параметров сложных динамических звеньев. Этот
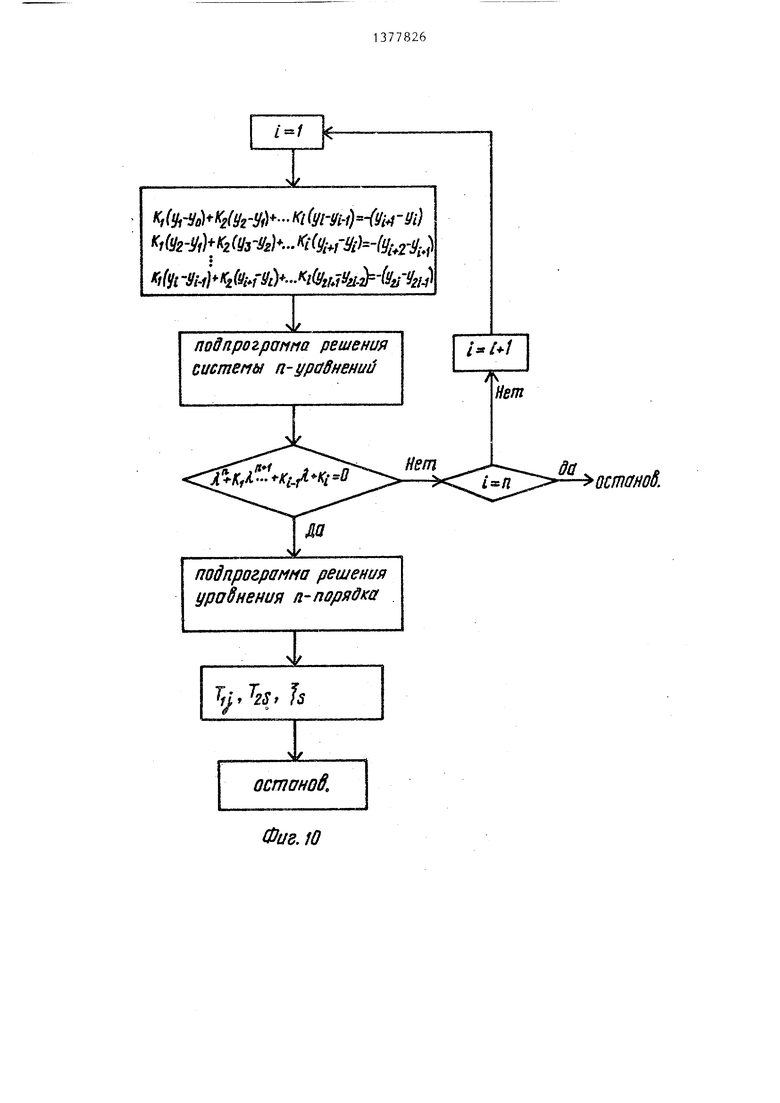
способ, в соответствии с уравнениями (2) - (4) заключается в измерении выходного сигнала звена через интервалы времени &€ после подачи единичного тестового cHrHajta и получении
разностей двух соседних значений измеренного сигнала и последующего получения порядка и параметров передаточной функции звена в следующей последовательности:
(Y,-YO)+K(Y.-Y,)-(), (7)
из которого находится коэффициент К.
(, )+K(Y,-Y2) -(,), (8)
если это уравнение превращается в тождество, то порядок передаточной функции звена (апериодическое звено), если уравнение не выполняется, то решается система уравнений
K,(Y,-Y,)+K2(,)- -(Y,-Y,)
K,(Y2-Y,)+K(Y,-Y2) -(Y,-Y,), из которой находятся коэффициенты
К, и К.
Найденные значения К, и К подставляются в уравнение
K,(Y,-Y,j)+K2(Y,-Y3) -(Yf-Y) (10)
если это уравнение выполняется, то порядок передаточной функции звена п 2;
если уравнение не выполняется, то система уравнений расширяется до трех уравнений и продолжается процесс вычислений далее до тех пор, пока коэффициенты К,, К,..., К;, найденные в результате решения какой- либо i системы уравнений, не превратят соответствующее проверочное уравнение в тождество. При этом порядок передаточной функции звена будет п i.
После это решается вспомогательное уравнение (4), корни которого определяют структуру и параметры исследуемого звена. При этом теоретически не существует ограничения на порядок исследуемых объектов, а все операции автоматизированы и не требуется предварительного значения структуры объекта. Кроме того, в предложенном устройстве значения выходного сигнала объекта могут быть сняты на любом участке переходной характеристики и нет необходимости в достижении установившегося состояния, что является также преимущест
10
15
20
25
)
30
35
40
45
50
55
вом предложенного способа, так как позволяет экономить время эксперимента, а также повысить точность устройства.
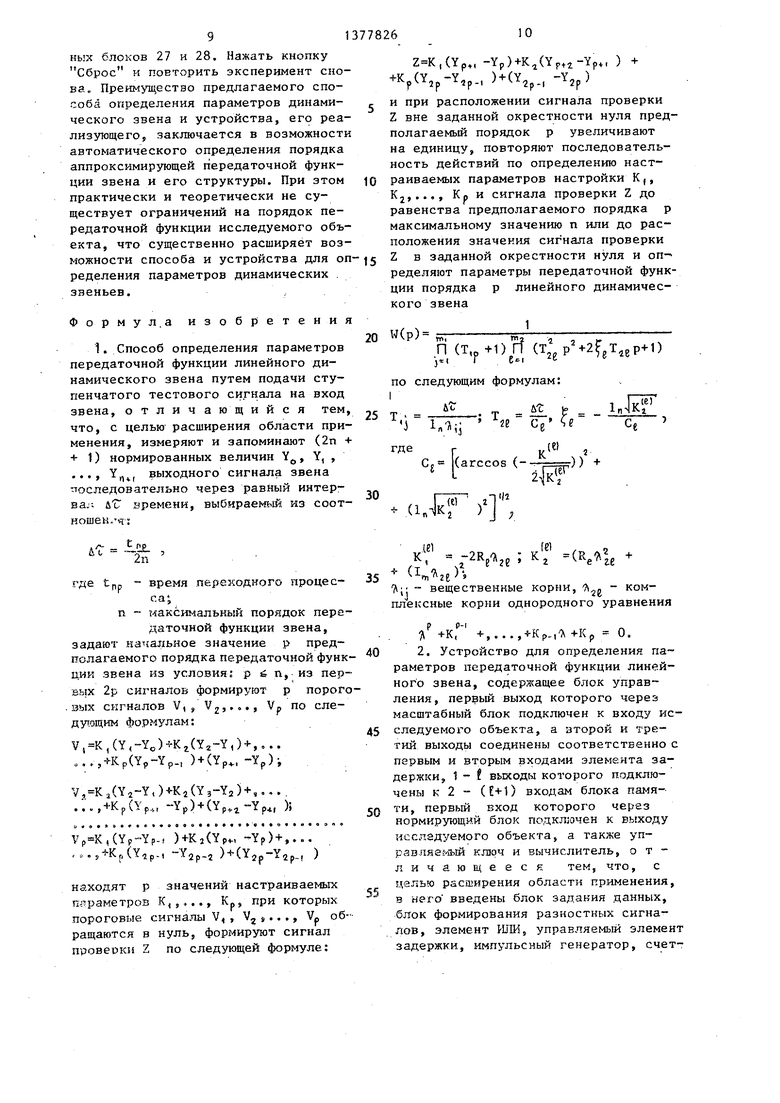
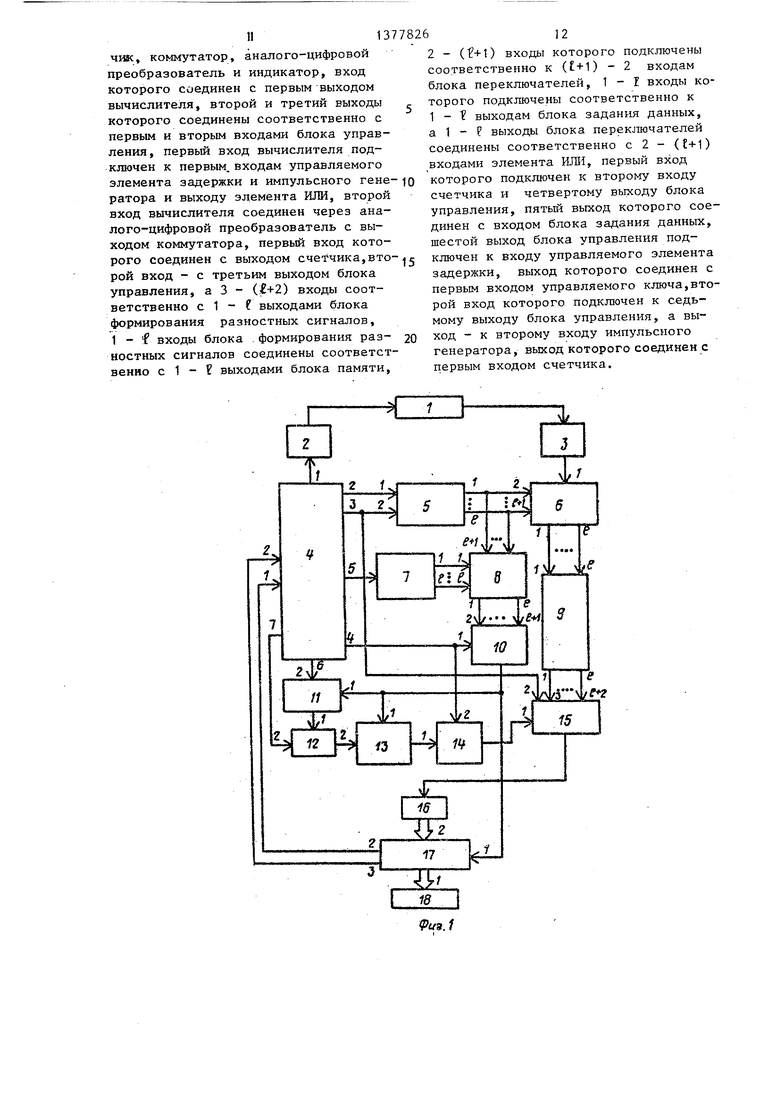
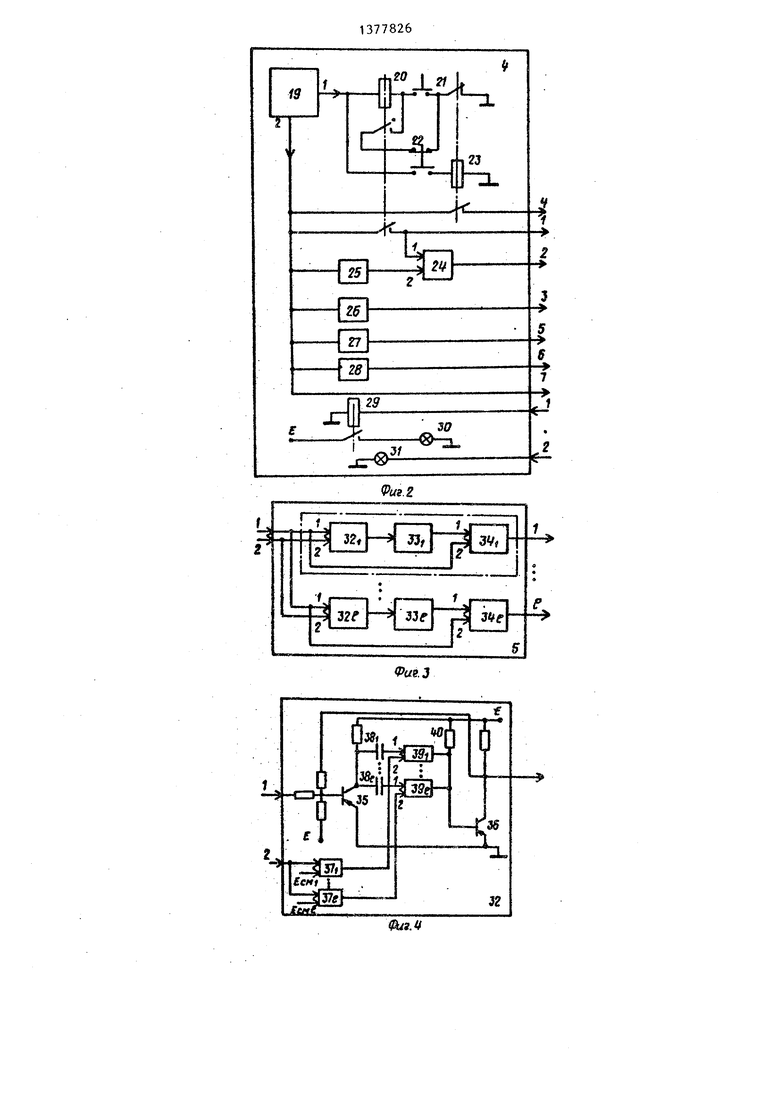
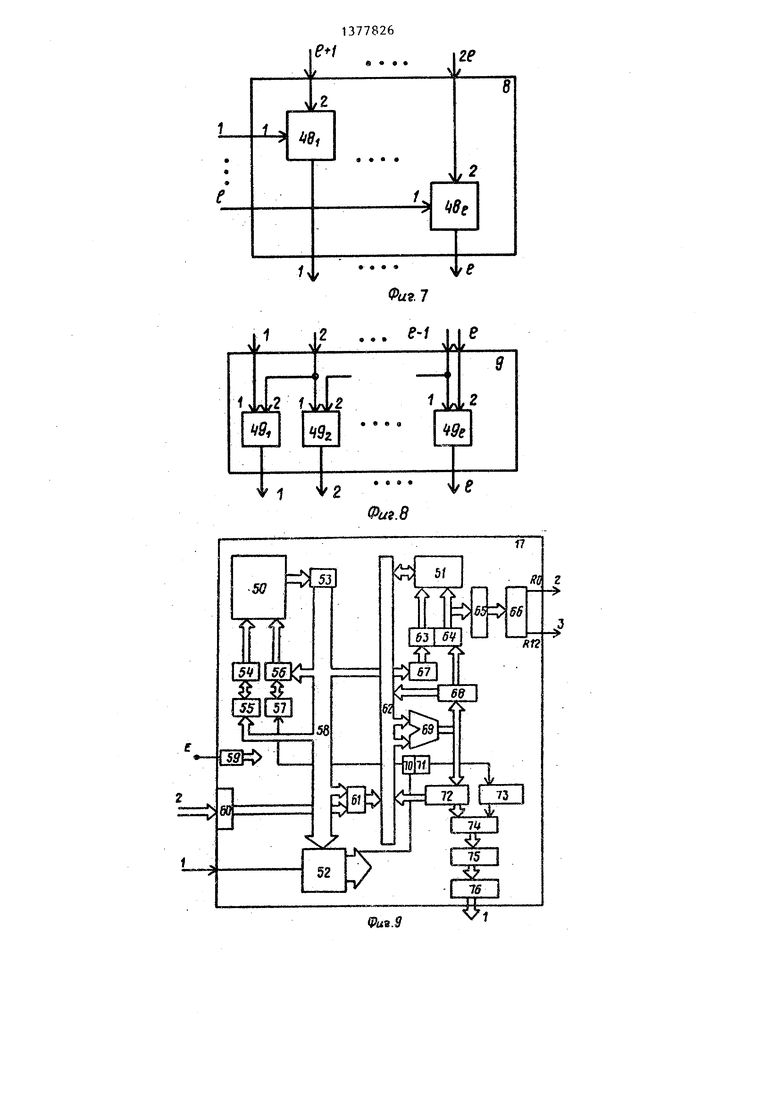
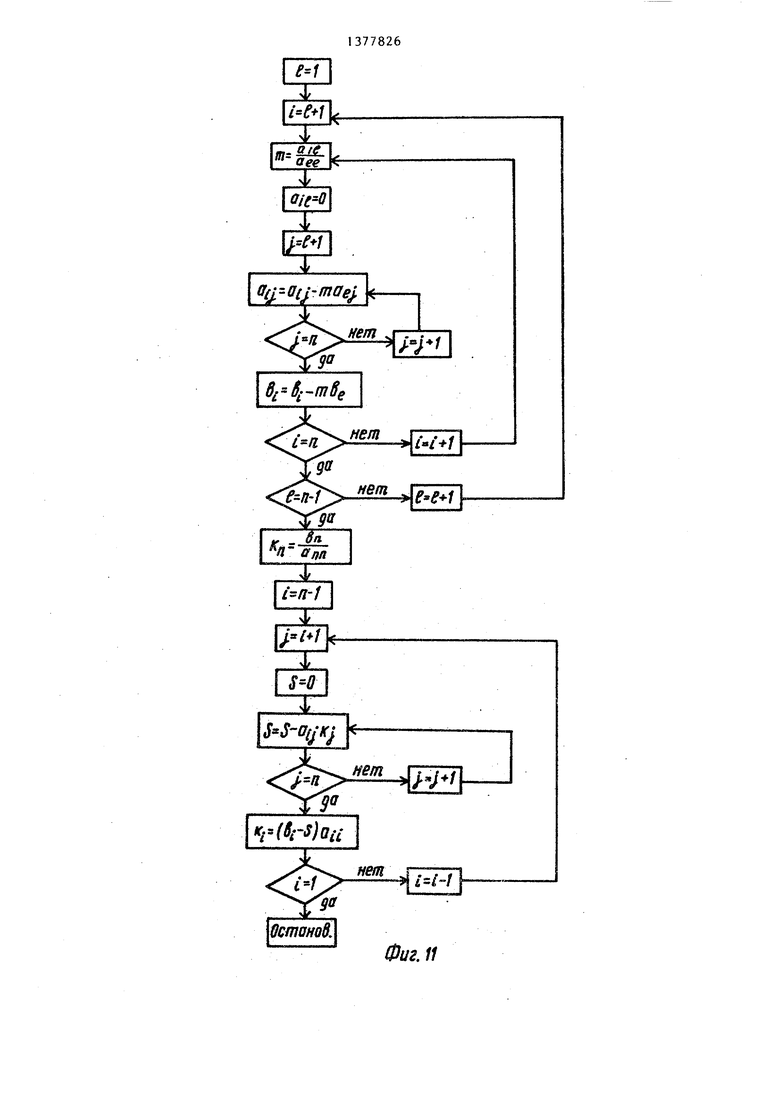
На фиг. 1 - приведена блок-схема устройства, реализующего предлагаемый способ; на фиг. 2 - схема блока управления| на фиг. 3 - схема управляемого элемента задержки; на фиг.4 - схема реле времени; на фиг.5 - схема блока памяти; на фиг. 6 - схема блока задания данных; на фиг. 7 - схема блока переключателей , на фиг. 8 - схема блока формирования разностных сигналов; на фиг. 9 - схема вычислителя; на фиг. 10, 11 и 12 - блок-схемы программы вычислений, реализуемых вычислителем.
Устройство содержит исследуемый объект 1, первый масштабный блок 2, нормирующий блок 3, блок 4 управления, управляемьш элемент 5 задержки, блок 6 памяти, блок 7 задания данных, блок 8 переключателей, блок 9 формирований разностных сигналов,элемент ИЛИ 10, управляемый элемент 11 задержки, управляемый ключ 12, им-, пульсный генератор 13, счетчик 14, коммутатор 15, аналого-цифровой преобразователь 16, вычислитель 17 и индикатор 18.
Блок 4 управления содержит блок 19 стабилизированных напряжений, первое реле 20, первую кнопку Пуск 21, вторую кнопку Сброс 22, второе реле 23, первьй управляемый блок 24 задержки, второй масштабный блок 25, третий масштабный блок 26, четвертьш масштабный блок 27, пятый масштабный блок 28, третье реле 29, первую и вторую индикаторные лампы 30 и 31.
Управляемый элемент 5 задержки содержит реле 32 времени, инвертор 33, элемент 34 сравнения, транзисторы 35 и 36, пороговый блок 37, конденсатор 38, управляемый ключ 39, резистор 40.
Блок 6 памяти содержит конденсатор 41, резистор 42, конденсатор 43, резистор 44, усилитель 45 постоянного тока, четвертое реле 46.
Блок 7 задания данных содержит элемент 47 сравнения.
Блок 8 переключателей содержит управляемых ключей 48.
Блок 9 формирования разностных сигналов содержит t усилителей 49 постоянного тока.
Вычислитель 17 содержит постоянное запоминающее устройство 50, оперативное запоминающее устройство 51, дешифратор 52 команд, регистр 53 команд, регистр 54 страницы, буфер 55 страницы, счетчик 56 команд, регистр 57 возврата, шина 58 команд, встроенный генератор 59, D-порт 60, мультиплексор 61 данных, шина 62 данных, первый буфер 63 связи, второй буфер 64 связи, R-регистр 65, R-порт 66, Х-регистр 67, Y-регистр 68, арифме- тическо-логическое устройство 69, .триггер 70 признака подпрограммы, триггер 71 состояния, аккумулятор 72, фиксатор 73 состояния, Q-регистр 74, выходная программируемая логическая матрица 75 и Q-порт 76.
Устройство определения параметров динамического звена работает следующим образом.
Зная примерно длительность переходного процесса объекта 1 при помощи масштабного блока 26 устанавливается длительность временного промежутка utr. Величина ut выбирается из условия, чтобы измеренные сигналы на выходе объекта не попадали на установившиеся значения переходного процесса, где работа устройства невозможна. При помощи масштабного блока 27 устанавливается время tj, необходимое для перзичной обработки информации, необходкг-юй для определения параметров динамического звена с предполагаемым порядком дифференциального уравнения. При этом с пятого выхода блока 4 управления поступает на первые входы элементов 47 сравнения блока 7 задания данных. Часть зяементов 47 срабатывает, тем самым подавая сигнал на первые входы соответствующих ключей 48 блока 8 переключателей, что приводит к подключению их вторых входов к выходу.
На выходе масштабного блока 28 устанавливается величина, пропорцио- нальная времени, необходимого для переключения соответствующего количества входов коммутатором 15.
При замыкании кнопки 21 Пуск в блоке 4 управления срабатывает реле 20 и замыкает свои разомкнутые контакты, кнопка блокируется. При замыкании второго нормально разомкнутого контакта сигнал с первого выхода блока 4 управления подается скачком через масштабный блок 2 на вход иссле0
5
5
0
дуемого объекта 1 При этом сигнал на выходе исследуемого звена представляет собой переходный процесс, который через нормирующий блок 3 поступает на первый вход блока 6 памяти.
На второй выход блока 4 управления, спустя tp, время установленное на масштабном блоке 25, с выхода управляемого блока 24 задержки подается сигнал, поступающий на первый вход элемента 5 задержки, откуда передается на первый вход реле 32 времени.
При подаче сигнала на базу транзистора 35 он открывается, конденсаторы 39 оказываются подключенными параллельно эмиттерно-базовому переходу транзистора 36. Количество конденсаторов 38, подключенных к схеме, определяется количеством срабатываемых ключей 39, которое в свою очередь определяется количеством сработавших блоков 37, определяемое величиной сигнала на втором входе схем задержки. Конденсаторы 38 оказываются подключенными к эмиттерно-базовому переходу транзистора 36 положительно заряженной пластиной к базе. Транзистор 36 запирается и находится в закрытом состоянии до тех пор, пока конденсаторы 38 не разрядятся через резистор 40. Когда окончится процесс разрядки конденсаторов 38, снова по- явится базовый ток транзистора 36, последний откроется и сигнала на выходе не будет. Таким образом, выдержка времени зависит от постоянной времени Т . Включение реле времени совместно с логическими элементами - инвертором 33 и элементом 34 обеспечивает появление сигнала на выходе с некоторым запаздыванием по отношению к входному сигналу. Задержка сигнала равна соответственно л о , 2л€ ,..., Ji T. Сигналы с выходом элемента 5 задержки поступают на второй по 1 плюс первый входы блока 6 памяти. Сигналы на выходах схем памяти до поступления сигналов с элемента 5 задержки точно отслеживают сигна.пы, поступающие на первый вход блока 6.
Когда на вторые входы блока 6 памяти поступают сигналы в моменты времени йТ, ,... 5 РлТ, то в соответ- 5 ствующйе моменты срабатывают реле 46 и размыкают свои нормально замкнутые контакты, при этом на выходе усилителя 45 постоянного тока запоминает0
5
0
5
0
ся напряжение, которое было на конденсаторе 43 в момент прихода управляющего сигнала на управление реле 46. Таким образом, на выходах схем памяти формируются значения выходного сигнала исследуемого объекта 1 2
YJ в моменты времени
елт.
Y, Y
ulT, - 2 й с ,...,
Одновременно с этим, сигналы с выходом элемента 5 задержки последовательно поступают на (1+1)-2 входы блока 8 переключателей, которые соединены со вторыми входами управляемых ключей 48. Когда сигнал приходит на сработавший ключ, то он проходит на элемент ИЛИ 10. С выхода элемента ИЛИ сигнал поступает на первый вход генератора 13, тем самым запуская его, а также на первый вход элемента 11 задержки и на первый вход вычислителя 17, устанавливая его в рабочее состояние.
Сигналы с выходов блока 6 памяти поступают на соответствующие входы блока 8 формирования разностных сигналов, сигналы на вьпсодах которого равны Y, -YO ,... ,Y,- -Y . .
Счетчик 14, начавший отсчет в момент запуска генератора 13, формирует на своем выходе коды, управляющие работой коммутатора 15, последовательно подключающего со второго по t+2 входы на вход аналого-цифрового преобразователя 16. Управляемый элемент 11 задержки срабатывает спустя время, необходимое для переключения коммутатором 15 п-выходов схем вычитания, заранее выставленное на масштабном блоке 28, тем самым подавая сигнал на управляющий вход 2. Ключ 12 замыкается, через него проходит сигнал на второй вход генератора 13 и останавливает его. Счетчик 14 прекращает свой отсчет, коммутатор 15 останавливается.
Одновременно с работой коммутатора 15 происходит ввод данных через аналого-цифровой преобразователь 16 в вычислитель 17 через его второй вход. В микропроцессоре по заложенной программе происходит проверка на неравенство нулю значений Yj -Y,v . Если it выбрано и Y,,..,,Y; не попало на установившийся переходный процесс исследуемого объекта, сигнал на втором выходе блока вычислителя не возникает и не поступает на обмотку реле 29, лампа 30 не загорается.
0
5
0
0
5
5
0
5
После остановки коммутатора 15 ввод данных в блок 17 вычислителя прекращается, что служит сигналом к запуску программы, по вычислению из введенных данных коэффициентов передаточной функции исследуемого объекта. Вычисленные параметры, преобразуясь в выходном шифраторе информации микропроцессора, поступают на его первый выход, а затем высвечиваются на индикаторе 18.
Если порядок дифференциального уравнения, описывакяцего исследуемый объект, выбран верно, то сигнал на третьем входе блока 17 вычислителя не возникает и лампа 31 не загорается. В случае если п выбрано непра-л ВИЛЬНО, возникает сигнал на втором выходе блока 17 вычислителя. Напряжение поступает на управление реле 29, оно замыкает свой нормально разомкнутый контакт, и лампа 30 загорается. В этом случае необходимо уменьшить величину сигнала на выходе масштабного блока 26 и повторить эксперимент сначала. Причем повторный пуск возможен только после того, как объект вернулся в исходное состояние.
Для этого необходимо нажать кнопку 22 Сброс блока 4 управления, при этом снимается сигнал с обмотки управления реле 20. Оно разомкнет свой нормально разомкнутый контакт и отключит сигнал со входа объекта 1. Одновременно будет- подано напряжение на обмотку реле 23, оно замкнет свой нормально разомкнутый контакт. Сигнал поступит на четвертый выход блока 4 управления и поступит на второй вход элемент 10 ИЛИ и второй вход счетчика 14 и осуществит обнуление выходов этих устройств. После этого сигнал снимается с первого входа блока 17 вычислителя и напряжение пропадет с его второго выхода. Обмотка реле 29 обесточится и лампа 30 гаснет.
Если порядок п выбран меньше, чем порядок передаточной функции исследуемого объекта 1, т.е. из введенного в блок 17 вычислителя объема данных по заложенной программе не удалось вычислить коэффициенты пе ре- даточной функции, то возникает сигнал на третьем выходе блока 17 вычислителя. Он поступает на лампу 31, и она зажигается.
В этом случае необходимо увеличить величину сигнала на выходе масштаб9
ных блоков 27 и 28. Нажать кнопку Сброс и повторить эксперимент снова. Пре имущее ста о предлагаемого способа определения параметров динамического эвена и устройства, его реализующего, заключается в возможности автоматического определения порядка аппроксимирующей передаточной функции звена и его структуры. При этом практически и теоретически не существует ограничений на порядок передаточной функции исследуемого объекта, что существенно расширяет возможности способа и устройства для определения параметров динамических . звеньев.
Форму л.а изобретения
,л- t по
U о - 2п
где tpp - время переходного процесса-,
п максимальный порядок передаточной функции звена, задают начальное значение р предполагаемого порядка передаточной функции звена из условия: р 6 п, из первых 2р сигналов формируют р порого .вых сигналов V,, Vj,,.., Vp по сле- дут.ощкм формулам:
V,K,(Y,Y«)-Ж (, ),,.. „,.,(Yp-Yp-, ) + (Yp, -Yp)i
V,K,(Y2-Y,)+Kj(Y3-Y2 ) + ,,,.. .,. , O- p-i. Yp) -(Yp. Yp, )
,( )+K2(Ypv, -Yp) + ,... ,..,Kp(Y,p., )-(Yjp-Y2p., )
находят p значений настраиваемых параметров К,,..., Кр, при которых пороговые сигналы V,, V..., Vp обращаются в нуль, формируют сигнал проверки Z по следующей формуле:
10
,(Yp, -Yp)+K(Yp,2-Yp,, ) + p(Y,p-Y,p-, )(Y,., )
и при расположении сигнала проверки Z вне заданной окрестности нуля предполагаемый порядок р увеличивают на единицу, повторяют последовательность действий по определению настраиваемых параметров настройки К,, Kj,..,, Кр и сигнала проверки Z до равенства предполагаемого порядка р максимальному значению п или до расположения значения сигнала проверки
Z в заданной окрестности нуля и оп- ределяют параметры передаточной функции порядка р линейного динамического звена
W(p)f
1
ri (Т,р+1) rf (т T,gp-f1)
«1 I Сс| по следующим формулам:
- аJK;
5
,iei
(81
(Re .
ге
к; -2Rj g ; к 2
-Лге)
А;: - вещественные корни, -л. - комплексные корни однородного уравнения
-«-кГ (р-, +КР 0.
0 2. Устройство для определения параметров передаточной функции линейного звена, содержащее блок управления, первый выход которого через масштабный блок подключен к входу ис5 следуемого объекта, а агорой и третий выходы соединены соответственно с первым и вторым входами элемента задержки, 1 - i выходы которого подключены к 2 - (Е+1) входам блока памяQ ти, первый вход которого через нормирующий блок подключен к выходу исследуемого объекта, а также уп- равляаг ЬЙ ключ и вычислитель, отличающееся тем, что, с целью расширения области применения, в него введены блок задания данных, блок формирования разностных сигналов, элемент PUIH, управляемый элемент задержки, импульсный генератор, счетчик, коммутатор, аналого-цифровой преобразователь и индикатор, вход которого соединен с первым выходом вычислителя, второй и третий выходы которого соединены соответственно с первым и вторым входами блока управления, первый вход вычислителя подключен к первым, входам управляемого элемента задержки и импульсного генератора и выходу элемента ИЛИ, второй вход вычислителя соединен через аналого-цифровой преобразователь с выходом коммутатора, первый вход которого соединен с выходом счетчика,второй вход - с третьим выходом блока управления, а 3 - (+2) входы соответственно с 1 - Р выходами блока формирования разностных сигналов, 1 - f входы блока . формирования раз- костных сигналов соединены соответственно с 1 - выходами блока памяти.
2 - (f+1) входы которого подключены соответственно к (+1) - 2 входам блока переключателей, 1 - I входы которого подключены соответственно к 1 - выходам блока задания данных, а 1 - Р выходы блока переключателей соединены соответственно с 2 - (+1) входами элемента ИЛИ, первый вход которого подключен к второму входу счетчика и четвертому выходу блока управления, пятый выход которого соединен с входом блока задания данных, шестой выход блока управления подключен к входу управляемого элемента задержки, выход которого соединен с первым входом управляемого ключа,второй вход которого подключен к седьмому выходу блока управления, а выход - к второму входу импульсного генератора, выход которого соединен с первым входом счетчика.
Фиъ.5
Фич.б
Фи9.В
л Гй-Ув)едгУ/)(/т-/} - - /)
/ГУгУ/)ЛгГУз- г)...« %Г Ь-/ .,2-4г // Уг г ЛЬ /б4д7%.2)
подпрогранна решения систепы п-ура8нений
подпрограмма решения уравнения п-порядка
Js
/
останоб.
Фив. 10
QCfHffHOe.
-p-k
-X
и±
zn
fffj,aij inaej.
df Sf-mSg
KC (6rS}au
Фиг. 11
| Балихарев B.C., Дудников Е.Г., Цирлин A.M | |||
| Экспериментальное определение динамических характеристик промышленных объектов управления | |||
| М.: Энергия, 1967 | |||
| Способ определения параметров передаточных функций линейных динамических объектов | 1977 |
|
SU661511A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
