Изобретение относится к самонастраивающимся системам управления объектами с запаздыванием, параметры которых неизвестны или меняются во времени, и может быть использовано для управления технологическими процессами, например, в металлургии, химической, целлюлозно-бумажной, энергетической, горной и других отраслях промышленности
Цель изобретения - повышение быстродействия, точности и домехоза- щищенности системы,
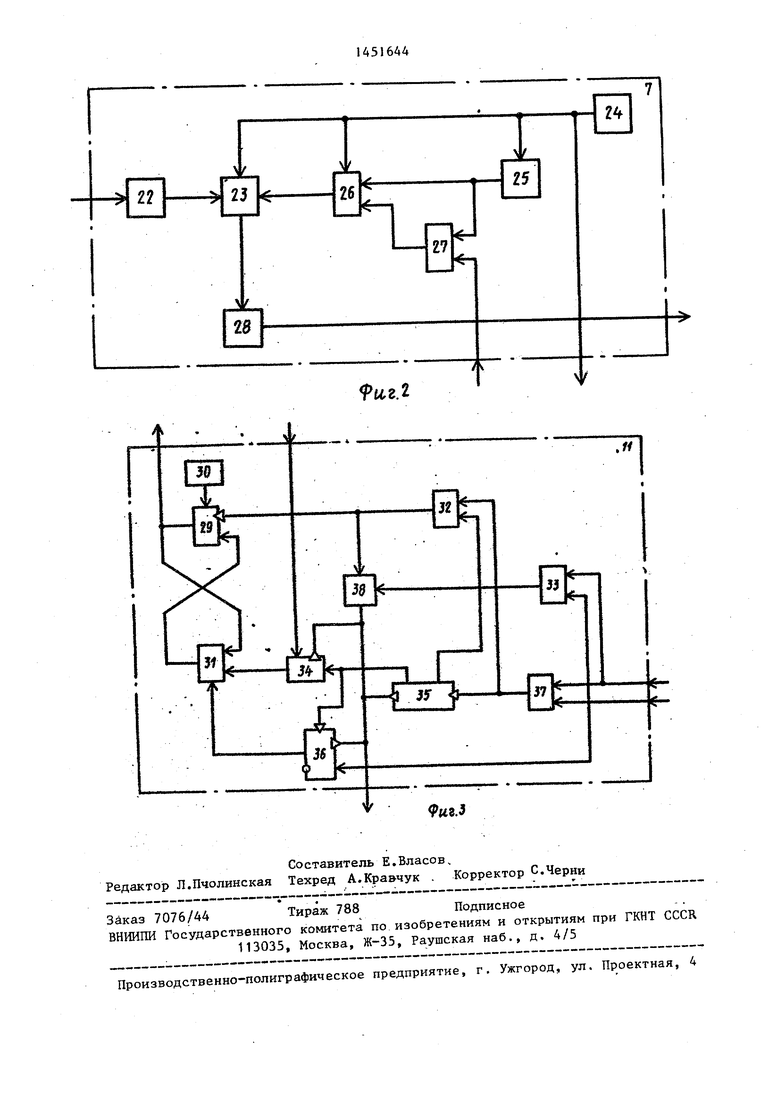
На фиг,1 показана блок-схема системы; на фиг.2 - блок задержки; на фиг.З блок управления задержкой.
Адаптивная система автоматического управления для нестационарных объектов с запаздыванием содержит задат чик 1, первый сумматор 2, регулятор 3, объект 4 управления, первую 5 и вторую 6 модели объекта без запаздывания, блок 7 задержки, первый бло 8 умножения, первый 9 и второй 10 дифференциаторы, блок П управления задержкой, блок 12 деления, второй блок 13 умножения, второй сумматор 14, ключ 15, интегратор 16, масштабирующий блок 17, вход 18 сброса интегратора, задатчик 19 коэффициента усиления, формирователь 20 импульсов управления ключом и третий сумматор 21 .
Блок задержки образуют аналого- цифровой преобразователь (АЦП) 22, запоминающее устройство (ЗУ) 23, генератор 24, счетчик 25 адресов, мультиплексор 26, вычитающее устройство (ВУ) 27, цифроаналоговый преобразователь (ЦАП) 28.
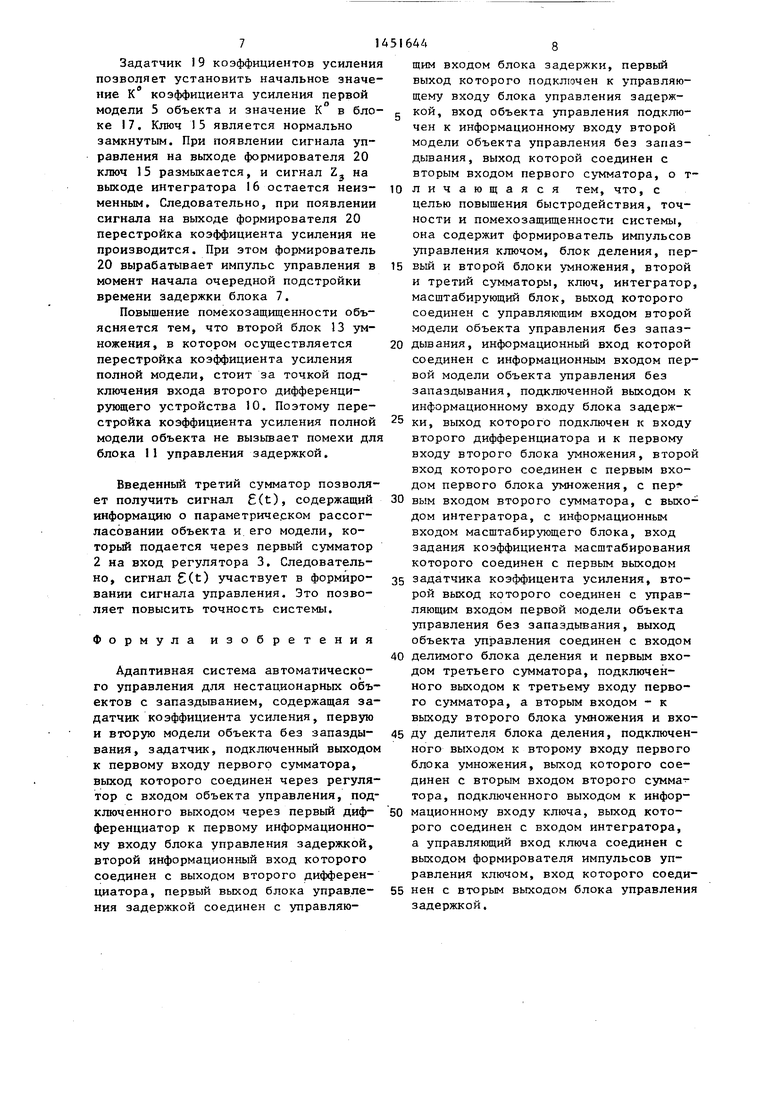
Блок 11 управления задержкой состоит из регистра 29, задатчика 30 времени задержки, сумматора 31, элементов И 32 и 33, счетчика 34 времени рассогласований задержки, счетчика 35, триггера 36 и элементов ИЛИ 37 и 3S.
Блок 7 задержки может быть постр ен как в аналоговом варианте, так и в цифровом. В аналоговом исполнении он может представлять собой ультра- звуков чо линию задержки с регулируемой характеристикой. В цифровом исполнении блока .задержки обладает большими возможностями, так как задержка сигнала может быть любой длительности.
0
15
20
50 55
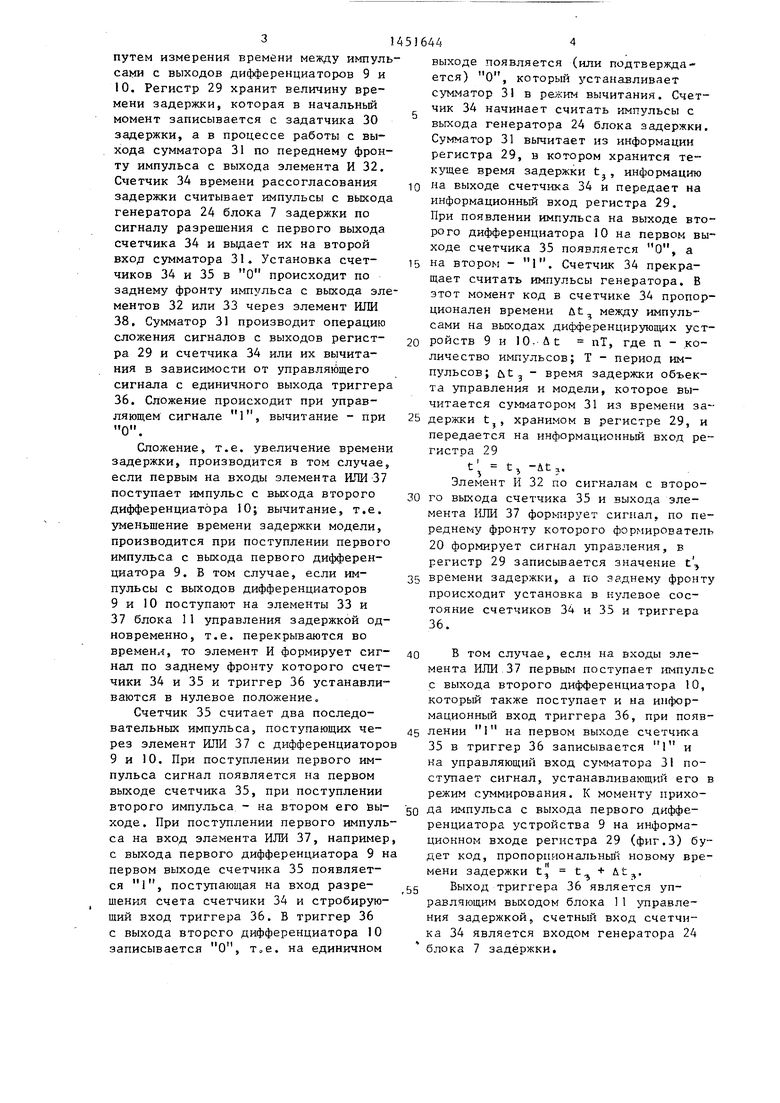
На фиг.2 представлен цифровой вариант блока 7 задержки. АЦП 22 преобразует входной сигнал в цифровой и передает на информационный вход ЗУ
23.которое переходит в режим записи при сигнале 1 на управляющем входе и н режим считьшания при сигнале О, поступающих с выхода генератора
24.ЗУ 23 запоминает входной сигнал по адресам, вырабатьшаемым счетчиком
25.При частоте f генератора в запоминающем устройстве 23 будет представлен сигнал в дискретном виде:
X(t,) X(N,T),
где Т f;
N - адрес запоминающего устройства.
. Мультиплексор 26 подключает к адресным входам ЗУ 23 выход счетчика 25 или ВУ 27 в зависимости от сигнала на выходе генератора 24: при сигнале 1 подключается счетчик 25, при 25 сигнале О - выход ВУ 27, которое вычитает из значения адреса ЗУ 23, в которое записалось текущее значение входного сигнала и код, пропорциональный времени задержки t, пос- 30 тупающий с выхода блока 11 управления задержкой. Полученный результат вычисления на выходе ВУ 27 через мультиплексор 26 (О на выходе генератора 24), подключается к адресному входу ЗУ 23, из которого считываетJ .4.
35
40
45
, Jf - - лт.- ..-f
ся информация X(t,-tj) о входном сигнале в момент времени (. Считанный из ЗУ 23 задержанньш сигнал преобразуется ЦАП 28 в аналоговую форму и подается на второй выход блока 7 задержки. При переполнении памяти ЗУ 23 (фиг.2) запись входного сигнала начинается с первого адреса, т.е. процесс идет циклически. Второй вход ВУ 27 соединен с первым выходом блока 11 управления задержкой фиг.1 выход генератора 24 (фиг.2) является управляющим входом блока 11 управления задержкой.
Дифференциаторы 9 и 10 дважды дифференцируют сигналы с выхода объекта 4 управления и с выхода блока 7 задержки, выделяя начало переходных процессов в выходных сигналах и передают их на информационные входы блока 11 управления задержкой.
Блок 11 управления задержкой устраняет рассогласование времени задержки объекта 4 управления и модели
3
путем измерения времени между импулсами с выходов дифференциаторов 9 и 10. Регистр 29 хранит величину времени задержки, которая в начальный момент записывается с задатчика 30
задержки, а в процессе работы с выхода сумматора 31 по переднему фронту импульса с выхода элемента И 32. Счетчик 34 времени рассогласования задержки считывает импульсы с выхода генератора 24 блока 7 задержки по сигналу разрешения с первого выхода счетчика 34 и выдает их на второй вход сумматора 31. Установка счетчиков 34 и 35 в О происходит по заднему фронту импульса с выхода элементов 32 или 33 через элемент ИЛИ 38. Сумматор 31 производит операцию сложения сигналов с выходов регистра 29 и счетчика 34 или их вычитания в зависимости от управляющего сигнала с единичного выхода триггера 36. Сложение происходит при управляющем сигнале 1, вычитание - при О.
Сложение, т.е. увеличение времени задержки, производится в том случае, если первым на входы элемента ИЛИ 37 поступает импульс с выхода второго дифференциатора 10; вычитание, т.е. уменьшение времени задержки модели, производится при поступлении первого импульса с выхода первого дифференциатора 9. В том случае, если импульсы с выходов дифференциаторов 9 и 10 поступают на элементы 33 и 37 блока 11 управления задержкой одновременно, т.е. перекрываются во времени, то элемент И формирует сигнал по заднему фронту которого счетчики 34 и 35 и триггер 36 устанавливаются в нулевое положение.
Счетчик 35 считает два последовательных импульса, поступающих через элемент ИЛИ 37 с дифференциаторо 9 и 10. При поступлении первого импульса сигнал появляется на первом выходе счетчика 35, при поступлении второго импульса - на втором его выходе. При поступлении первого импульса на вход элемента ИЛИ 37, например с выхода первого дифференциатора 9 н первом выходе счетчика 35 появляется 1, поступающая на вход разрешения счета счетчики 34 и стробирую- ший вход триггера 36. В триггер 36 с выхода второго дифференциатора 10 записывается О, Тое. на единичном
выходе появляется (или подтверждается) О, который устанавливает сумматор 31 в режим вычитания. Счетчик 34 начинает считать импульсы с выхода генератора 24 блока задержки. Сумматор 31 вычитает из информации регистра 29, в котором хранится текущее время задержки t, информацию
0 на выходе счетчика 34 и передает на информационный вход регистра 29. При появлении импульса на выходе второго дифференциатора 10 на первом выходе счетчика 35 появляется О, а
5 на втором - 1. Счетчик 34 прекращает считать импульсы генератора. В этот момент код в счетчике 34 пропорционален времени At. между импульсами на выходах дифференцирующих уст0 ройств 9 и 10--At пТ, где п - количество импульсов; Т - период импульсов; utj - время задержки объекта управления и модели, которое вычитается сумматором 31 из времени за5 держки tj, хранимом в регистре 29, и передается на информационный вход регистра 29
t t -4tj. Элемент И 32 по сигналам с второ0 го выхода счетчика 35 и выхода элемента 11ПИ 37 формирует сигнал, по переднему фронту которого формирователь 20 формирует сигнал управления, в регистр 29 записывается значение t ,
5 времени задержки, а по заднему фронту происходит установка в нулевое состояние счетчиков 34 и 35 и триггера 36.
0 В ТОМ случае, если на входы элемента ИЛИ.37 первым поступает импульс с выхода второго дифференциатора 10, который также поступает и на информационный вход триггера 36, при появ5 лении I на первом выходе счетчика 35 в триггер 36 записывается и на управляющий вход сумматора 31 поступает сигнал, устанавливающий его в режим суммирования. К моменту прихо0 дз импульса с выхода первого дифференциатора устройства 9 на информационном входе регистра 29 (фиг.З) будет код, пропорциональны новому времени задержки
t;-
ч
At
5 Выход триггера 36 является управляющим выходом блока 11 управления задержкой, счетный вход счетчн- ка 34 является входом генератора 24 блока 7 задержки.
51
Процесс подстройки коэффициента
усиления моделей происходит следующим образом.
В начале работы выходной сигнал интегратора 16 равен единице, т.е. Z (tg) 1, а коэффициент усиления устанавливается задатчиком 19 равным к. Пусть параметры моделей 5 и 6 объекта управления адекватны пара- метрам самого объекта 4 управления. Тогда выходной сигнал объекта 4 управления YO равен выходному сигналу полной модели Y . При этом выходной сигнал блока 12 деления Z
-- - 1, выходной сигнал блока 8 YW
умножения
г,-г,.г,.
Сигнал Z, на выходе интегратора 16 остается равным единице. Подстройка коэффициентов усиления моделей не производится.
Пусть в некоторый момент времени t, коэффициент усиления объекта 4 управления скачкообразно изменяется. Тогда выходной сигнал объекта Y (t) отличается от выходного сигнала полной модели Y (t). Сигнал на выходе блока 12 деления
/ ..
Выходной сигнал первого блока b умножения в момент времени t,
Z,(t,)Z,(t.) Z,(t,)K,(t,)-l
KK(t,
Спустя время 5 , определяемое переходным процессом замкнутого конту- ра, образованного вторым сумматором 14, ключом 15 и интегратором 16, сигнал Z, становится равным
z(t, -t-n Za(t,) ,).
Подстройка коэффициента усиления полной модели осуществляется путем умножения выходного сигнала блока / на сигнал Z,, равный коэффициенту к коррекции K(t,).
В блоке 17 определяется текущее значение коэффициента усиления объета путем домножения исходного коэффициента усиления на сигнал Z коррекцииZ,(t, +П , +fi) KC,- Пусть в некоторьй момент времени t (t t ) коэффициент усиления об екта% управления снова скачкообра
6446
но изменяется. Сигналы на выходах объекта и полной модели снова отличаются друг от друга Yo(t): ). Выходной сигнал блока 12 деления
5
0 5
.(ч) 1:{Й- Выходной сигнал первого блока 8 умножения равен
Z,(4)Z,(t) Z,(t2) (Z,(t2) Z,(t,+) К,(Ч)- K(t, ) .
Спустя время , определяемое переходным процессом замкнутого контура, образованного вторым сумматором 14, ключом 15 и интегратором 16, сигнал Zj становится равным
Z,(t -bS)Z(t,,) K,(4)-Kj,(t, ).
В результате этого уровень сигнала на выходе второго блока умножения 8 увеличивается в )-К (t,) раз. Сигналы на выходах объекта и г полной модели объекта становятся равными между собой, а выходной сигнал Z , блока 12 деления становится равным единице.
Блок 17 оценивает текущее значение коэффициента усиления объекта 4 управления путем умножения исходного значения коэффициента усиле- ния объекта 4 управления К на текущее значение сигнала Z,. По сигналу Z. осуществляется перестройка коэффициента усиления второй модели 6 объекта 4 управления без запаздывния. Если в дальнейшем коэффициент усиления объекта 4 управления остаеся неизменным, то сигнал Z, на выходе блока 12 деления остается постоянным и равным единице.
Если коэффициент усиления объект 4 управления меняется, то процесс подстройки коэффициентов усиления мделей объекта снова осуществляется по изложенному алгоритму.
Сигнал Z, на втором входе второг блока 13 умножения можно представит
в виде
Z,(t) ),
где t - моменты времени в интервале (to,t), в которые происходит скакообразное изменение коэффициента . усиления объекта, а сигнал Z на выходе блока 17 определяется выражением:
Z4(t) Z,(t)- к K KKCt;)
7
Задатчик 19 коэффициентов усилени позволяет установить начальное значение к коэффициента усиления первой модели 5 объекта и значение К в блоке 17. Ключ 15 является нормально замкнутым. При появлении сигнала управления на вькоде формирователя 20 ключ 15 размыкается, и сигнал Z на выходе интегратора 16 остается неиз- менным. Следовательно 5 при появлении сигнала на выходе формирователя 20 перестройка коэффициента усиления не производится. При этом формирователь 20 вырабатывает импульс управления в момент начала очередной подстройки времени задержки блока 7.
Повышение помехозащищенности объясняется тем, что второй блок 13 умножения, в котором осуществляется перестройка коэффициента усиления полной модели, стоит за точкой подключения входа второго дифференцирующего устройства 10. Поэтому перестройка коэффициента усиления полной модели объекта не вызывает помехи дл блока П управления задержкой.
Введенный третий сумматор позволяет получить сигнал (t), содержащий информавд ю о параметрическом рассогласовании объекта и его модели, который подается через первый сумматор 2 на вход регулятора 3. Следовательно, сигнал 6(t) участвует в формиро- вании сигнала управления. Это позволяет повысить точность системы.
Формула изобретения
Адаптивная система автоматического управления для нестационарных объектов с запаздыванием, содержащая за- датчик коэффициента усиления, первую и вторую модели объекта без запазды- вания, задатчик, подключенный выходом к первому входу первого сумматора, выход которого соединен через регулятор с входом объекта управления, подключенного выходом через первый диф- ференциатор к первому информационному входу блока управления задержкой, второй информационный вход которого соединен с выходом второго дифференциатора, первый выход блока управле- ния задержкой соединен с управляю
5
0 5
0 5
5 0 5
6448
щим входом блока задержки, первый выход которого подключен к управляющему входу блока управления задержкой, вход объекта управления подключен к информационному входу второй модели объекта управления без запаздывания, выход которой соединен с вторым входом первого сумматора, о т- личающаяся тем, что, с целью повышения быстродействия, точности и помехозащищенности системы, она содержит формирователь импульсов управления ключом, блок деления, первый и второй блоки умножения, второй и третий сумматоры, ключ, интегратор, масштабирующий блок, выход которого соединен с управляющим входом второй модели объекта управления без запаздывания, информационный вход которой соединен с информационным входом первой модели объекта управления без запаздывания, подключенной выходом к информационному входу блока задержки, выход которого подключен к входу второго дифференциатора и к первому входу второго блока у1.1ножения, второй вход которого соединен с первым входом первого блока умножения, с пер вым входом второго сумматора, с выходом интегратора, с информационным входом масштабирующего блока, вход задания коэффициента масштабирования которого соединен с первым выходом задатчика коэффицента усиления, второй выход которого соединен с управляющим входом первой модели объекта управления без запаздывания, выход объекта управления соединен с входом 0 делимого блока деления и первым входом третьего сумматора, подключенного выходом к третьему входу первого сумматора, а вторым входом - к выходу второго блока умножения и входу делителя блока деления, подключенного выходом к второму входу первого блока умножения, выход которого соединен с вторым входом второго сумматора, подключенного выходом к информационному входу ключа, выход которого соединен с входом интегратора, а управляющий вход ключа соединен с выходом формирователя импульсов управления ключом, вход которого соединен с вторым выходом блока управления задержкой.
.2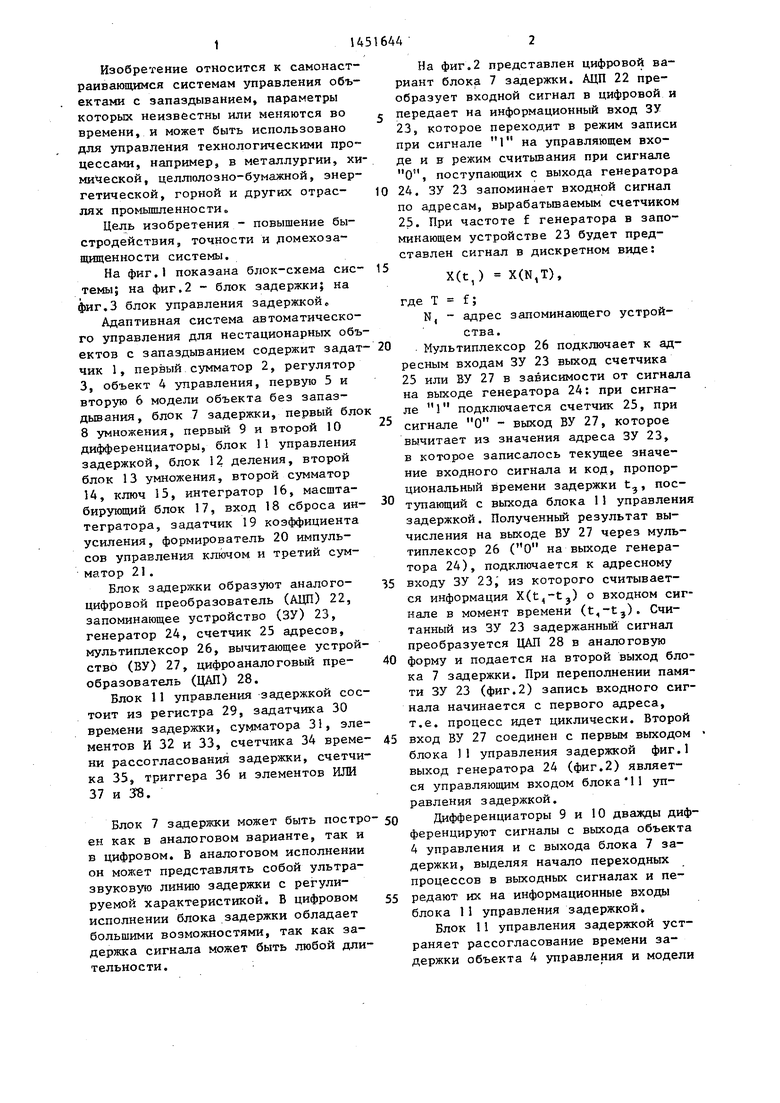
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
Изобретение относится к самонастраивающимся системам управления объектами с запаздыванием, параметры которых неизвестны или меняются во времен:-, и может быть использовано для управления технологическими процессами, например, в металлургии. химической, целлюлозно-бумажной, энергетической, горной и других отраслях промышленности. Целью изобретения является повышение быстродействия, точности и помехозащищенности системы. Система содержит за- датчик 1, сумматоры 2, 14, 21, регулятор 3, объект 4 управления, дифференциаторы 9, 10 блок П управления задержкой, а также блок 7 задержки, задатчик 19 коэффициентов усиления, модели 5 и 6 объекта управления без о запаздьшания, блок 12 деления, блоки 8 и 13 умножения, ключ 15, интегратор 16, масштабирующий блок 17, формирователь 20 импульсов управления ключом. Система обеспечивает управление нестационарным технологическим объектом с изменяющимся запаздыванием путем плавной адаптации коэффициента усиления и времени задержки контура с моделью объекта управления. 3 ил. i (Л 4 СП Од 4 4 «Лсв. Г
Риг.З
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
