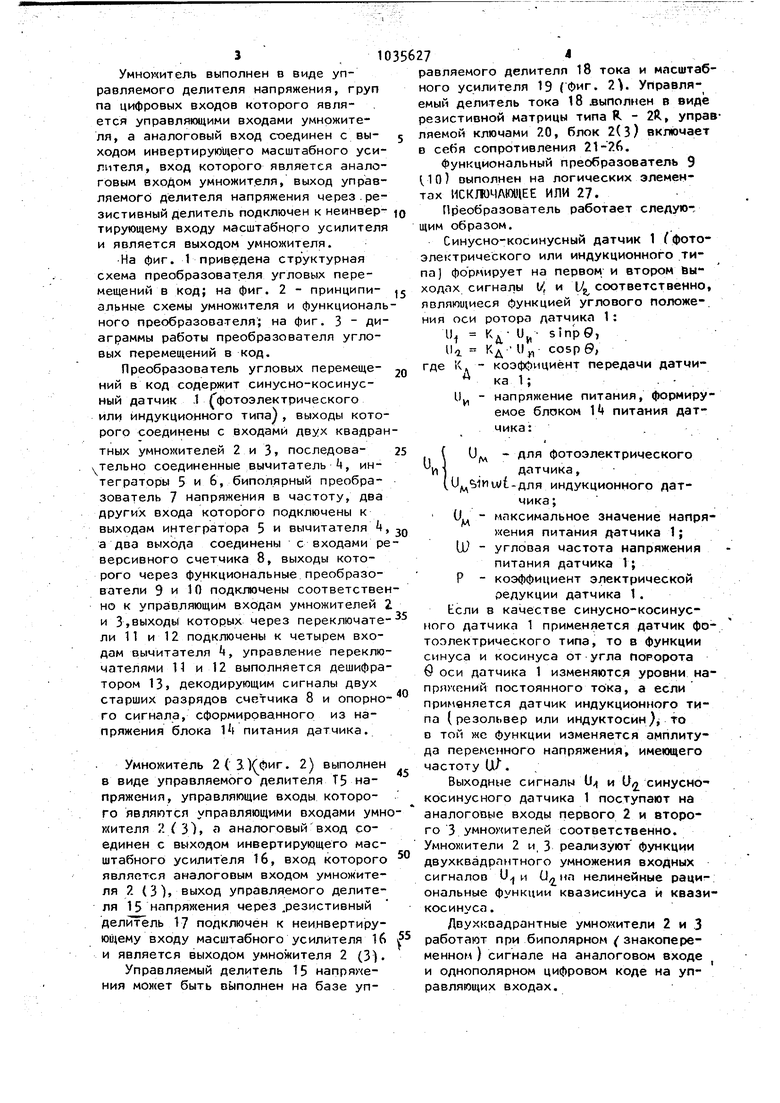
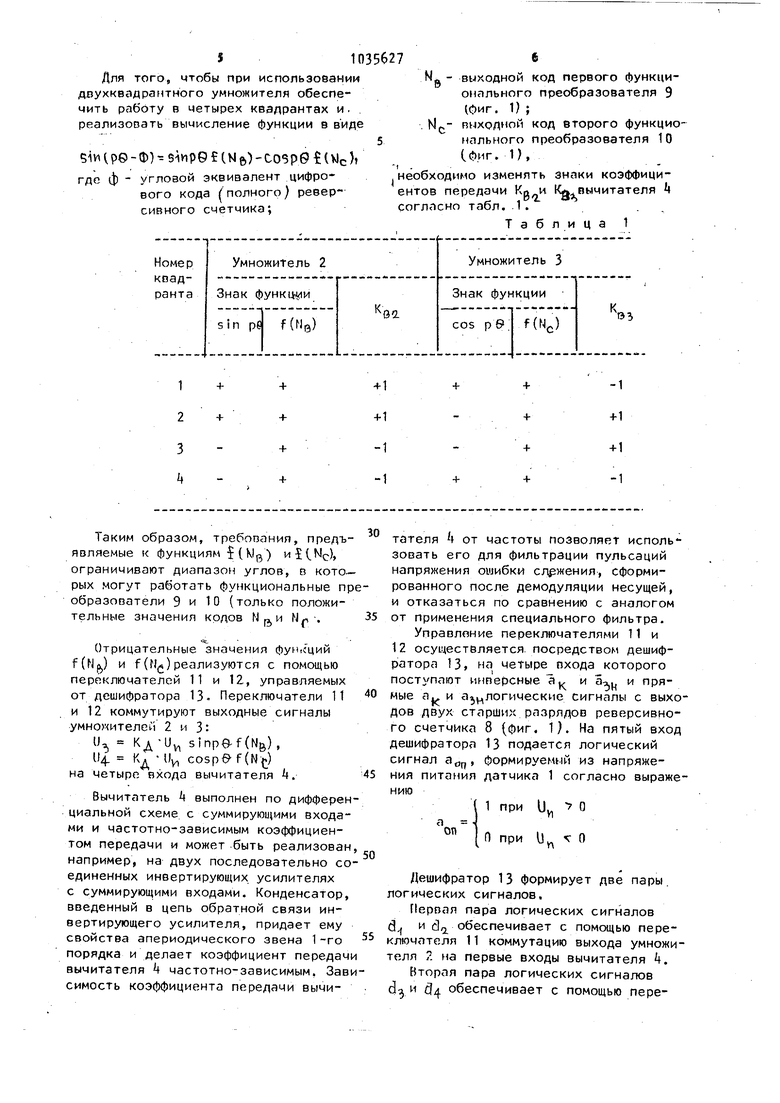
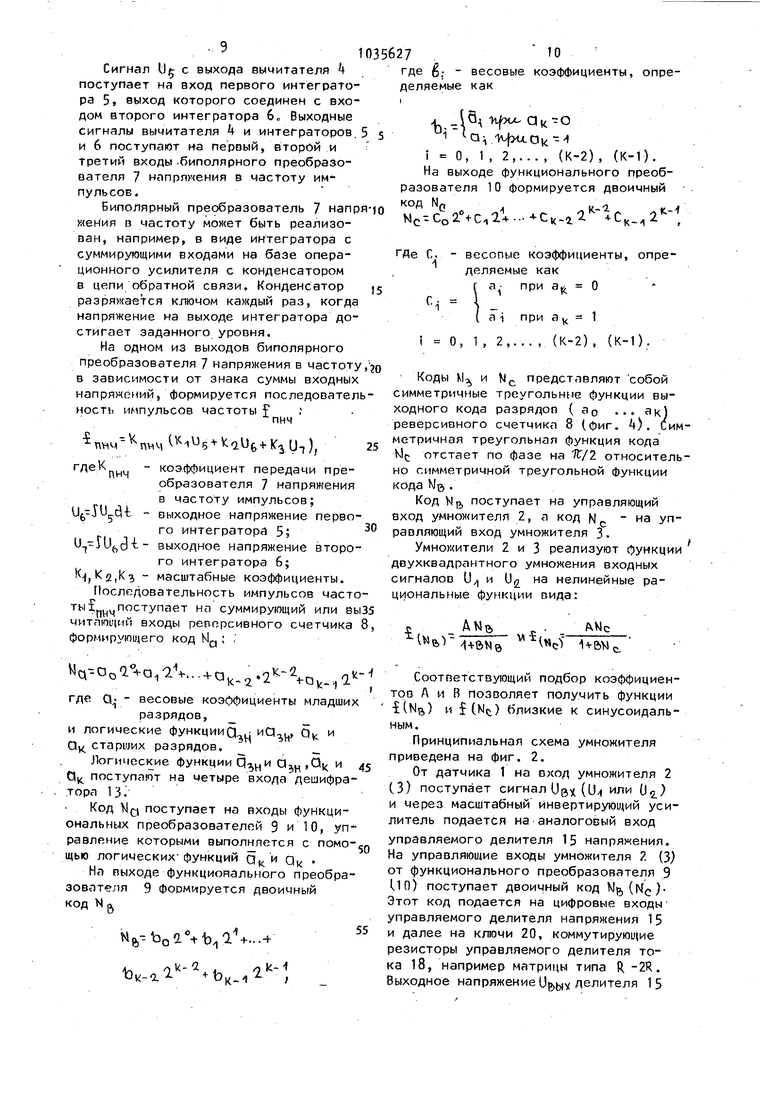
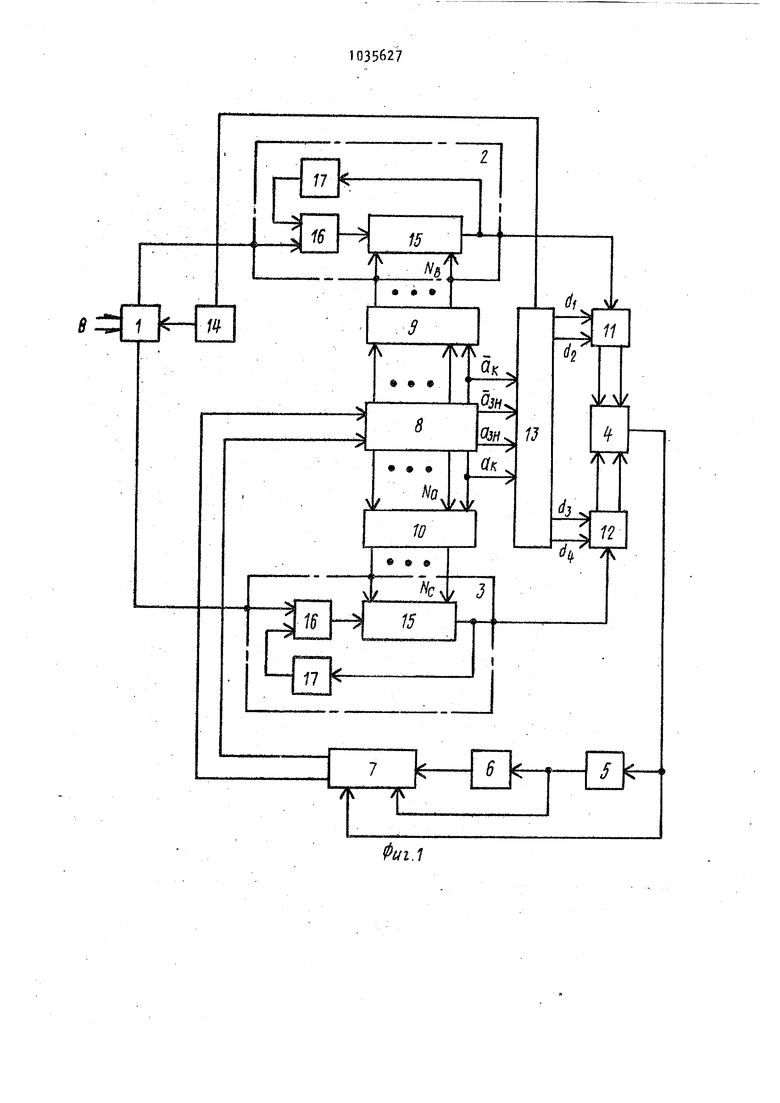
Изобретение относится к области автоматики и измерительной техники и моиет быть использовано в цифровых системах автоматического управления, в частности в линейных и- круговых измерительных преобразователях перемещения исполнительных органов станков с числовым программным управлением (чпу;. Известен преобразователь угловых перемещений в код, содержащий генератор опорного напряжения, выход которого подключен к индукционному синусно-косинусному датчику угла и к одно му из входов аналогового умножителя, к другому входу которого подключен выход суммирующего операционного усилителя, выход аналогового умножителя через фильт-р низких частот соединен с входами управляемого генератора частоты и дискриминатора направления счета, выходы которых подключены к со ответствующим в-ходам реверсивного счетчика, выходы разрядов реверсивного счетчика соединены с соответствующими разрядами функциональных цифроаналоговых преобразователей, выходы которых соединены с инвертирующими входами операционных усилителей, прямые входы операционных усилителей соединены с соответствующими выходами синусно-косинусного датчика, выходы операционных усилителей подключены к соответствующим входам функциональных цифроаналоговых преобразователей и суммирующего операционного усилителя С 1. Недостатком такого преобразователя является ограниченная область применения, так как он работает только с индукционным синусно-косинусным дат чиком. Известен также преобразователь угЧ ловых перемещений в код, содержащий синусно-косинусный датчик угла, первый и второй входы которого соединены : с аналоговыми входами первого и второго умножителей, выходы которых подключены к вычитателю, выход вычитателя через первый и второй интеграторы подключены к первому входу преобразователя напряжения в частоту, второй пход которого соединен с выходом первого интегратора, третий вход соединен с выходом вычитателя, а два выхода соединены с двумя входами реверсив- b ного счетчика, одна группа выходов которого через первый функциональный преобразователь подключена к управляющим входам первого умножителя, а вторая Труппа выходов через второй функциональный преобразователь - к управляющим входам второго умножителя С:.. Такой преобразователь не имеет динамической погрешности в режиме постоянной скорости и в режиме постоянного ускорения, относительно прост и имеет достаточно высокую надежность. Однако он имеет ограниченную область применения. Целью изобретения является расширение области применения и упрощение преобразователя. I Пост авленная цель достигается тем, что в преобразователь угловых перемещений в код, содержащй блок питания, один выход которого соединен с входом синусно-косинусного датчика, первый выход которого соединен с первым входом первого умножителя, второй выход синусно-косинусного датчика соединен с первым входом второго умножителя, и вычитатель, выход которого соединен с входом первого интe paтopa и первым входом преобразователя напряжения в частоту, второй вход которого соединен с выходом первого интегратора, который также со единен с входом второго интегратора, выход которого соедр нен с третьим входом преобразователя напряжения в частоту, два выхода которого соединены с двумя входами реверсивного счетчика, одна группа выходов которого через первый функциональный преобразователь подкгвочена к управляющим входам первого умножителя, а вторая группа выходов реверсивного счетчика через второй функциональный преобразователь подключена к управляющим входам второго умножителя, введены два переключателя и дешифратор, четыре входа которого подключены к прямым и инверсным выходам двух старших разрядов реверсивного счетчика, а пятый вход соединен с вторым выходом блока питания датчика, первый и второй, третий и четвертый выходы дешифратора подключены соответственно к управляющим входампервого и второго переключателей, первый и второй выходы которых подключены к соответствующим суммирующим входам вычитателя, входы переключателей соединены с соответствующими выходами первого и второго умножителей. Умножитель выполнен в виде управляемого делителя напряжения, труп па цифровых входов которого является управляющими входами умножителя, а аналоговый вход с-оединен с выходом инвертирующего масштабного усилителя, вход которого является аналоговым входом умножит.еля, выход управляемого делителя напряжения через.резистивный делитель подключен к неинвертирующему входу масштабного усилителя и является выходом умножителя. На фиг. 1 приведена структурная схема преобразователя угловых перемещений в код; на фиг. 2 - принципиальные схемы умножителя и функциональ ного преобразователя; на фиг. 3 - диаграммы работы преобразователя угловых перемещений в код. Преобразователь угловых перемещеНИИ в код содержит синусно-косинусный датчик -1 фотоэлектрического или индукционного типа) , выходы которого соединены с входами двух квадран тных умножителей 2 и 3 последовачтельно соединенные вычитатель, интеграторы 5 и 6, биполярный преобразователь 7 напряжения в частоту, два других входа которого подключены к выходам интегратора 5 и вычитателя k а два выхода соединены с входами ре версивного счетчика 8, выходы которого через функциональные преобразователи 9 и 10 подключены соответстве но к управляющим входам умножителей и 3 выходы которых через переключате ли 11 и 12 подключены к четырем входам вычитателя k, управление переклю чателями 11 и 12 выполняется дешифра тором 13 декодирующим сигналы двух - старших разрядов счетчика 8 и опорно го сигнала, сформированного ---из напряжения блока питания датчика. Умножитель 2( 31)Гфиг. 2) выполнен в виде управляемого делителя Т5 напряжения, управляющие входы которого являются управляющими входами умн жителя /-О), Д аналоговыйвход соединен с выходом инвертирующего масштабного усилителя 16, вход которого является аналоговым входом умножителя . (3), выход управляемого делителя 15 напряжения через .резистивный делитель 17 подключен к некнвертирующему входу масштабного усилителя 16 и является выходом умножителя 2 (3). Управляемый делитель 15 напряу ения может быть выполнен на базе уп17л равляемого делителп 18 тока и масштабного усилителя 19 (фиг. Л. Управлямый делитель тока 18 выполнен в виде резистивной матрицы типа R - 2R, управяемой ключами 20, блок 2(3) включает себя сопротивления 21-.6. Функциональный преобразователь 9 (, 10) выполнен на логических элементах ИСКШЧЛЩЕЕ ИЛИ 27. Преобразователь работает следую-, щим образом. Синусно-косинусный датчик 1 Гфотоэлектрического или индукционного типа ) формирует на первом и втором йыходпх сигналы Ц и ЧУ соответственно, являющиеся функцией углового положе-. ния оси ротора датчика 1; Uj,- sinpQ, и, к На - Кд - и„ cosp©, коэффициент передачи датчика 1 ;. напряжение питания, формируемое блоком питания датчика:- для фотоэлектрического датчика. U i-inu/t-для индукционного датчика;и,. - максимальное значение напряжения питания датчика 1; угловая частота напряжения питания датчика 1; коэффициент электрической редукции датчика 1. Ьсли в качестве синусно-косинусиого датчика 1 применлется датчик фотоэлектрического типа, то в функции синуса и косинуса от угла поророта О оси датчика 1 изменяются уровни напря чпнии постоянного тока, а если применяется датчик индукционного типа ( резольвер или индуктосин); то в той же функции изменяется амплитуда переменного напряжения, имеющего частоту Ц/. Выходные сигналы и U. инуснокосинусного датчика 1 поступают на аналоговые входы первого 2 и второго 3 умно ителей соответственно. Умножители 2 и 3 реализуют функции двухквадрпнтного умножения входных сигналов нелинейные рациональные функции квазисинуса и кваэикосинуса. Двухкоадрантные умнох ители 2 и 3 работают при биполярном ( знакопеременном ) сигнале на аналоговом входе и однополярном цифровом коде на управляющих входах. Для того, чтобы при использовании двухквадрантного умножителя обеспечить работу в четырех квадрантах и. . реализовать вычисление функции в виде 5ivi (р© -Ф) S14P0 (N б)С05Р0 {(Vic Ь где ф - угловой эквивалент цифрового кода (полного) реверсивного счетчика; 103 7 Ng - выходной код первого функционального преобразователя 9 (Оиг. 1) ; . выходной код второго функционального преобразователя 10 (фиг. 1), необходимо изменять знаки коэффициентов передачи 1 вычитателя согласно табл. 1. . . . Таблица 1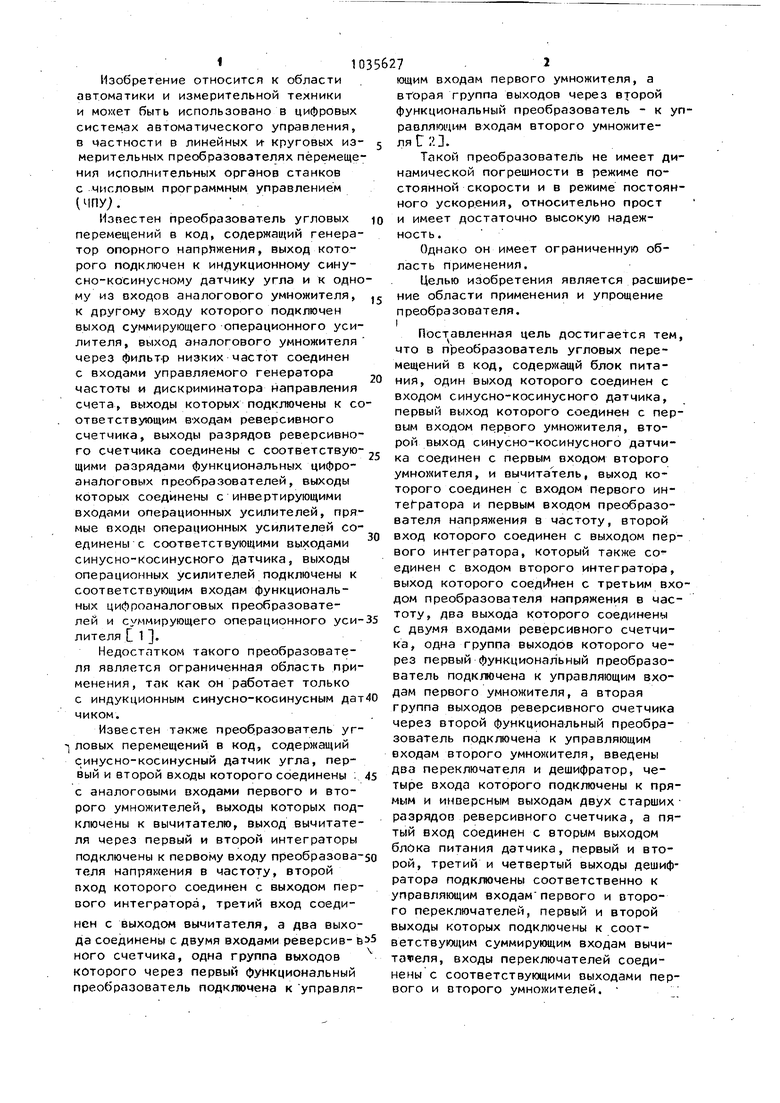

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловых перемещений в код | 1985 |
|
SU1272507A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Синусно-косинусный преобразователь | 1975 |
|
SU551659A1 |
| Функциональный преобразователь угла поворота вала в код | 1984 |
|
SU1262729A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД | 1991 |
|
SU1826836A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1580556A1 |
Таким образом, требопанил, предъявляемые к функциям {( К1д) и$(Мс), ограничивают диапазон углов, в которых могут работать функциональные пр образователи 9 и 10 (только положительные значения кодов N э, и Мл-. Отрицательные значения фуньсции f(Nu) и fCflj) реализуются с помощью переключателей 11 и 12, управляемых от дешифратора 13. Переключатели 11 и 12 коммутируют выходные сигналы умно)чителей 2 и 3: 1Ц KAUVI slnpe-f(Ng), 1)4 Кд -Uy, (N|.) на четыре входа вычитателя . Вычитатель 4 выполнен по дифферен циальной схеме с суммируюи4ими входами и частотно-зависимым коэффициентом передачи и может быть реализован например, на двух последовательно со единенных инвертирующих, усилителях с суммирующими входами. Конденсатор, введенный в цепь обратной связи инвертирующего усилителя, придает ему свойства апериодического звена 1-го порядка и делает коэффициент передач вычитателя k частотно-зависимым. Зав симость коэффициента передачи вычитателя t от частоты позволяет использовать его для фильтрации пульсаций напряжения ошибки сложения, сформированного после демодуляции несущей, и отказаться по сравнению с аналогом от применения специального фильтра. Управление переключателями 11 и 12 осуществляется, посредством дешифратора 13, на четыре пхода которого поступают инверсные ц и и прямые а. и а,логические сигналы с выходов двух старших разрядов реверсивного счетчика 8 (фиг. 1}. На пятый вход дешифратора 13 подается логический сигнал , формируемый из напряжения питания датчика 1 согласно выражению ( 1 при и О П при U -с О Дешифратор 13 формирует две пары, логических сигналов. flepoan пара логических сигйалов d и d/i обеспечивает с помощью переключателя 11 коммутацию выхода умножителя /. на Первые входы вычитателя 4. Вторая пара логических сигналов d обеспечивает с помощью пере 10356278
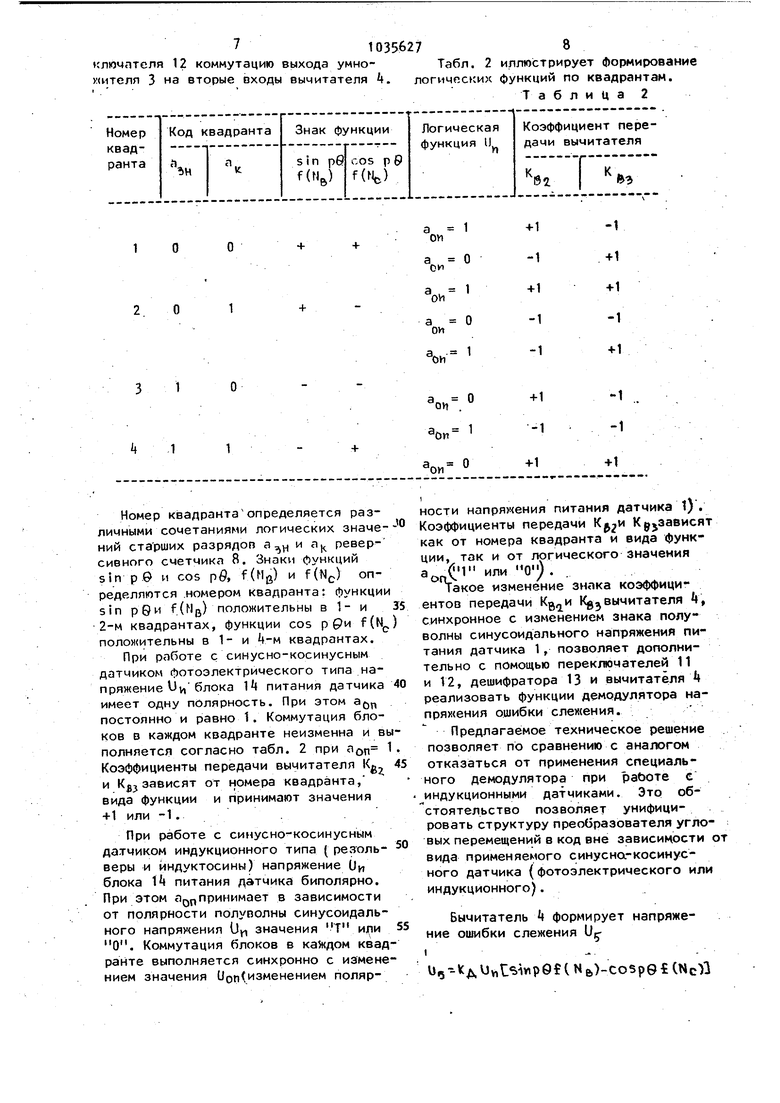
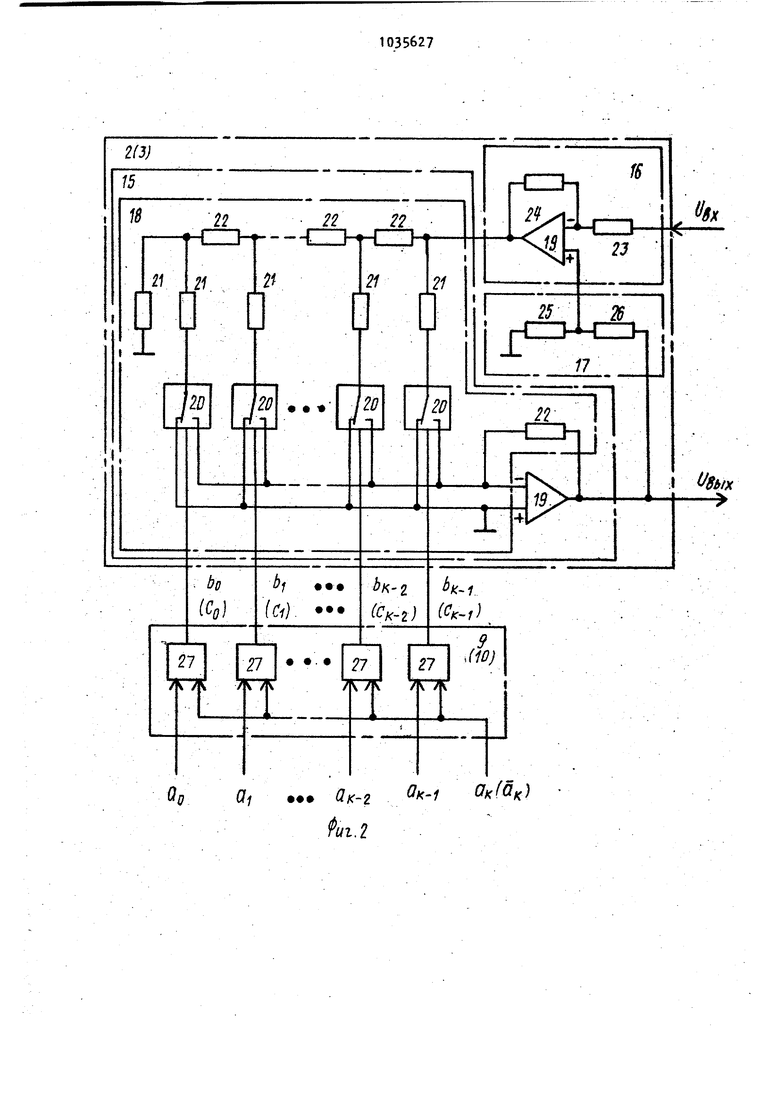
клпчптсля 12 коммутацию выхода умно- Табл. 2 иллюстрирует формирование чителп 3 на вторые входы вычитателя k. логических функций по квадрантам. Номер квадранта определяется различными сочетаниями логических значе НИИ старших разрядов а и я реверсивного счетчика 8. Знаки функций sin р.9 и cos , fXHg) и f(N) определяются .номером квадранта; функци sin Р0И f(M0) положительны в 1- и 2-м квадрантах, функции cos р (М положительны в 1- и k-м квадрантах. При работе с синусно-косинусным датчиком фотоэлектрического типа напряжение блока 1 питания датчика имеет одну полярность. При этом , постоянно и равно 1. Коммутация блоков в каждом квадранте неизменна и в полняется согласно табл. 2 при Q Коэффициенты передачи вычитателя К и Kjj зависят от номера квадранта, вида функции и принимают значения +1 или -1. При работе с синусно-косинусным датчиком индукционного типа ( резольверы и йндуктосины) напряжение UM блока И питания датчика биполярно. При этом а рПринимает в зависимости от полярности полуволны синусоидального напряжения 0 значения Т И11И О. Коммутация блоков в кашдом квад ранте выполняется синхронно с измене нием значения Uonfизменением полярТ а б л и Ц а 2 ности напряжения питания датчика 1). Коэффициенты передачи К К зависят как от номера квадранта и вида функции, так и от логического знамения ил ОуТакое изменение знака коэффициентов передачи Kg вычитателя , синхронное с изменением знака полуволны синусоидального напряжения питания датчика 1, позволяет дополнительно с помощью переключателей 11 и 12, дешифратора 13 и вычитателя реализовать функции демодулятора напряжения ошибки . Предлагаемое техническое решение позволяет по сравнению с аналогом отказаться от применения специального демодулятора при раЬоте с индукционными датчиками. Это обстоятельство позволяет унифицировать структуру преобразователя угловых перемещений в код вне зависимости от вида применяемого синусна-косинусного датчика (фотоэлектрического или индукционного). Бычитатель k формирует напряжение ошибки слежения .5- A vit iwp0f CNe,)-cosp9{(Nc)l Сигнал U с выхода вычитателя поступает на вход первого интегратора 5, выход которого соединен с входом второго интегратора 6о Выходные сигналы вычитателя k и интеграторов. и 6 поступают на первый, второй и третий входы .биполярного преобразователя 7 напряжения в частоту импульсов. Биполярный преобразователь 7 напр иеиия в частоту быть реализован, например, в виде интегратора с суммирующими входами на базе операционного усилителя с конденсатором в цепи обратной связи. Конденсатор разряжается ключом кахедый раз, когда напряжение на выходе интегратора достигает заданного уровня. На одном из выходов биполярного преобразователя 7 напряжения в частот в зависимости от знака суммы входных напряженийI формируется последовател ность импульсов частоты f -« s aUfe+lfiUT), где К коэффициент передачи преобразователя 7 напряжения в частоту импульсов; выходное напряжение перво го интегратора 5; U -IU cl-t- выходное напряжение второ го интегратора 6; -f,, масштабные коэффициенты. Последовательность импульсов част ты.упоступает на суммирующий или в читающий входы реверсивного счетчика формирующего код ; . М --Ооа а,2...а. где Q. - весовые коэффициенты младши разрядов, и логические функцииQ.; , Q и Оц старших разрядов. Ъгииеские функции р-, и d ,0; и Оц поступают на четыре входа дешифра тора 13/ Код NQ поступает на входы функциональнь х преобразователей 9 и 10, уп равление которыми выполняется с помо щью логических функций Q и Q , На выходе функционального преобра зователя 9 формируется двоичный код Ng Se,--boa ъ,l... Ъ... 27 6; - весовые коэффициенты, определяемые как . бд if ouaK-o i а:, .o«-i i о, 1 , 2 (К-2), (К-1). На выходе функционального преобразователя 10 формируется двоичный код N Nc--Coi C.l-...,2-, лО л1 . f весопые коэффициенты, определяемые как при а при С1 ц. ,.., (К-2), (К-1). ,1,2, Коды М и NJ, представляют собой треугольные функции высимметричныеразрядоп ( ао ... ак) ходного кода реверсивного счетчика 8 (фиг. ). Симметричная треугольная функция кода MC отстает по фазе на относительно симметричной треугольной функции кода MB . Код HIJ, поступает на управляющий вход умножителя Z, а код ц - на управляющий вход умножителя 3. Умно); ители 2 и 3 реализуют функции двухквадрантного умножения входных сигналов и и и на нелинейные рациональные функции вида: гAt45. -ЛМс t-vftNe -(М , Соответствующий подбор коэффициентов Л и В позволяет получить функции (NB) и f (N.) близкие к синусоидальным . Принципиальная схема умножителя приведена на фиг. 2. От датчика 1 на вход умножителя 2 (3) поступает сигнал Ug (U-i или (J-j.) и через масштабный инвертирующий усилитель подается на аналоговый вход управляемого делителя 15 напряжения. На управляющие входы умножителя . (3) от функционального преобразователя 9 UO) поступает двоичный код М)5,((ч}. Этот код подается на цифровые входы управляемого делителя напряжения 15 и далее на ключи 20, коммутирующие резисторы управляемого делителя тока 18, например матрицы типа R -2R. Выходное напряжение ))y делителя 15 1 в соответствукхчем масштабе вычитаетс из входного Upsv согласно выражению М. I, 1 EdlM- ftWll Ro. / а JftAlRlMMfeccn) быч ex l4 ll..A&iCl. R3)+ft4 ft2 a I После введения обозначений д, -El-, ft .) получают ЛЫыс) -V5(N,e)). Методическая ошибка преобразования, обусловленная использопанипм ку сочно-нелинейных функций f(M|) и i(Nc для формирования сигнала ошибки слежения невелика. При оптимальном выборе коэффициентов А и В, наприме с помощью метода Гаусса-Зайделя, от носительная погрешност ь преобразова ния при идеальных входных сигналах не превышает О,0092% от полюсного деления датчика i. 7 Преобразователь угловых перемещений в код практически не чувствителен к частоте напряжения питания датчика 1 и устойчив к возмущениям. Интеграторы, введенные в структуру преобразователя, обеспечивают астатизм системы, определяемый порядком. В ремиме постоянной скорости измеряемого перемещения напряжение на выходе второго интегратора 6 устанавливаетсп .таким, что напряжение на выходе вь1читателя и выходе первого интегратора 5 становится равным нулю. Динамическая погрешность преобразования в этом случае отсутствует. I . В режиме постоянного ускорения ди-. намическая О1иибка преобразования также равна нулю. В этом режиме после окончания переходного процесса напряжение на выходе интегратора 5 устанавливается постоянным, а напряжение на выходе интегратора 6 линейно возрастает. Содержимое реверсивного счетчика 8, выполняющего функцию цифрового интегратора, изменяет значения кодов Nft и N таким образом, что напряжение U на выходе вычитателя j, пропорциональное ошибке слежения, устанавливается равным нулю.
16
с
п
f
15
/
NB
/
S
2
%,
5
/J
%.
О/с
А/л
/л
d3
/
di/, /К
%
Ч/5ТК Ж
7 18
о Oi ... йк-г -1
Q
fei.2
22
I %« - 22
