Изобретение относится к электротехнике и может быть использовано в электроприводах шахтных подъемников, механизмов кранов и т.п.
Цель изобретения - снижение массы и габаритов и повышение КПД.
На чертеже представлена блЪк-схе- ма устройства.
Устройство для управления асинх- ронным электродвигателем 1 с фазным- Гротором содержит сетевой контактор 2 с тремя силовыми контактами и двум входами 3 и 4 управления, тормозной контактор 5 с двумя силовыми контак- ;тами и двумя входами 6 и 7 управле- ния, трехфазный мостовой выпрямитель 8, трехфазный мостовой тиристорный инвертор 9 с анодной и катодной группами 10 и 11 тиристоров, датчик 12 скорости на валу электродвигателя 1,,датчик 13 тока, сглаживающий дроссель 14, блок 15 управления инвертором 9 с двумя входами и шестью выходами, элемент 16 сравнения с двумя входами, задатчик 17 скорости, одни выводы сил.овых контактов сетевого контактора 2 снабжены зажимами для подключения фаз питающей сети, други выводы силовых контактов сетевого контактора 2 снабжены зажимами для подключения выводов статорной обмотк асинхронного электродвигателя 1, од- йи выводы силовых контактов тормозного контактора 5 соединены с другими выводами силовых контактов сетевого контактора 2, вход трехфазного мост-ового выпрямителя 8 подключен к выводам роторной обмотки асинхронного электродвигателя 1, точка соединения катодов вентилей трехфазного мостового выпрямителя 8 подключена к точке соединения анодов тиристоров Трехфазного мостового тиристорного инвертора 9, точка соединения анодов
вентилей трехфазного мостового вьшря- 45другого. От задатчика 19 режима в
мителя 8 через соединенные последо-положении Динамическое торможение
вательно датчик 13 тока и сглаживаю-блок 21 управления контакторами дроссель 14 подключена к точкерабатывает сигнал на выключение сетесоединения катодов тиристоров трех-вого контактора 2, которьй разрешает
фазного мостового тиристорного инвер- 50включение тормозного контактора 5. тора 9, входные выводы которого снаб- При этом две статорные обмотки
жены зажимами для подключения фаз питающей сети, один вход 4 управления сетевого контактора 2 подключен к соответствующему входу 7 управления тормозного контактора 5, выход задатчика 17 скорости подключен к одному входу элемента 16 сравнения.
двигателя 1 подключаются к анодам тиристоров управляемого трехфазного тиристорного выпрямителя 18 и к точ- 55 ке соединения датчика 13 тока и
сглаживающего дросселя 14. Последний служит для улучшения формы тока возбуждения двигателя 1 и, следователь
S
выход которого подключен к одному входу блока 15 управления инвертором 9, другой вход которого подключен к выходу датчика 13 тока, управляемьй трехфазный тиристорный вьшрямитель 18 с нулевой точкой, задатчик 19 режима работы с тремя выходами, блок 20 управления напряжением обратной связи с двумя входами и одним выходом, блок 21 управления сетевым и тормозным контакторами 2 и 5 с двумя входами и одним выходом, подключенным к другим входам 3 и 6 управления контакторов 2 и 5, выход датчика 12 скорости подключен к одним выходам ;блока 20 управления напряжением обратной связи и блока 21 управления сетевым и тормозным контакторйми 2 и 5, другие входы которых подключены соответственно к первому и второму выходам задатчика 19 режима работы, третий вькод которого подключен к входу задатчика 17 скорости, выход блока 20 управления напряжением обратной связи подключен к другому входу элемента 16 сравнения, другой вывод первого силового контакта тормозного контактора 5 подключен к точке соединения анодов тиристоров управляемого трехфазного тиристорного выпрямителя 18, катоды которых предназначены для подключения фаз питающей сети, другой вывод второго силового контакта тормозного кон5 тактора 5 подключен к точке соединения выводов датчика 13 тока и сглаживающего дросселя 14.
Сетевой и тормозной контакторы 2 и 5 имеют инверсные входы 3 и 6, поскольку они подключены к общему выходу блока 21 управления. Входы 4 и 7 контакторов 2 и 5 выполняют функцию блокировки, исключающей срабатывания одного контактора при включении
0
двигателя 1 подключаются к анодам тиристоров управляемого трехфазного тиристорного выпрямителя 18 и к точ- 55 ке соединения датчика 13 тока и
сглаживающего дросселя 14. Последний служит для улучшения формы тока возбуждения двигателя 1 и, следовательно, для улучшения формы кривой тормозного момента.
Величина вьшрямленного напряжения мостового несимметричного управляемого выпрямителя, состоящего из управляемого трехфазного тиристорного выпрямителя 18 и катодной группы 11 трехфазного инвертора 9, при торможении двигателя 1 определяется из вьгражёния
и
de
IB
1,17Uq,cosot, - 1,17U,p cos(n -p) - (I
+ I)(RO. 2r +
)
2TT
dp
P L cp
„
X R.
где о( - постоянный угол управления трехфазного выпрямителя 18 с нулевой точкой, фазное напряжение питающей сети
угол управления инвертором 9;
выпрямленный ток ротора, постоянный ток питания обмоток статора при динамическом торможенииI сопротивление сглаживающег дросселяi
соответственно активное и реактивное сопротивления фазы согласующего трансформатора, приведенные к вторичной обмотке, или, соответственно, сопротивление токоограничивающего реактора,
суммарное сопротивление обмоток двигателя 1 при выбранной схеме их соединения в режиме торможения. Величина напряжения возбуждения Ujg выбирается так, чтобы ток ротора двигателя 1 при торможении был равен заданному (обычно двойному номинальному значению выпрямленного тока ротора ), при этом ток возбуждения двигателя 1 не превьш1ает двух-четьфех значений его намагничивающего тока в режиме холостого хода
Величину угла управления трехфаз- ного управляемого вьшрямителя 18 определяют из режима торможения двигателя 1 с максимальной скорости с выпрямленным током ротора, равным двойному номинальному.
С этой целью решают систему уравнений равновесия напряжений контура выпрямленного тока ротора, контура
тока возбуждения (1) и уравнения соотношения токов двигателя 1 при динамическом торможении.
Уравнение равновесия напряжений контура выпрямленного тока ротора имеет вид
(1)
t5
где X,.,, г - индуктивное и активное сопротивления фазы об- мотки ротора двигателя. При решении расчетный угол управления сетевого инвертора определяется формулой
arc
cos
К.
и„-5
К
СХ2
и.
,.
где Up - линейное напряжение ротора
при S 1; . р. - минимальный угол управления
инвертором.
Соотношение токов двигателя 1 предлагаемого устройства определяется уравнением
0
+ 2
5
dp где К /
1 fl К, 3
К. 7
I(uXjv,
(3)
коэффициент, характеризующий соотношение между эквивалентным по намагничивающей силе
переменным током и током возбуждения (величина К определяется схемой соединений обмоток статора при динамическом торможении). Решение системы (1) - (3) производится следующим образом. Используя кривую намагничивания асинхронного двигателя, для заданных значений I.p, S и |3 по уравнениям (2) и (3) строят два графика. По уравнению (2) строят график зависимости тока возбуждения от намагничивающего тока
If(R d arc cos
3, . xgx .g-dp 1,17Uq,cos (IT -p)
Система регулирования при торможении поддерживает выпрямленный ток ротора на заднем уровне, а по катодной группе 11 мостового инвертора 9 20 i в это время протекает суммарный ток
dP Ч
Задатчик 19 режима вьфабатывает следующие сигналы. Один из них запрещает задатчику 17 скорости передавать задание на скорость элемента 16 сравнения. Второй сигнал изменяет полярность сигнала обратной связи по скорости на выходе блока 20 управления напряжением обратной связи. Третий сигнал задатчика 19 режима раз- разрешает работу блока 21 управления контакторами 2 и 5. Сигнгш с выхода элемента 16 сравнения является заданием на ток при торможении.
В процессе торможения двигателя регулятор 15 выпрямленного тока системы регулирования поддерживает выпрямленный ток ротора на заданном уровне. Происходит практически линейное изменение скорости двигателя. При достижении нулевой скорости сигнал обратной связи по скорости с датчика 12 скорости заставляет блок 21 управления контакторами выключить тормозной контактор 5 динамического торможения. На этом заканчивается процесс динамического торможения.
+ Rj+IdpR;
ТТТГ
I
и тем самым уменьшить массу и габариты и повысить КПД устройства.
Формулаизобр етения
35
40
Устройство для управления асинхронным электродвигателем с фазным
25 ротором, содержащее сетевой контактор с тремя силовыми контактами и двумя входами управления, тормозной контактор с двумя силовыми контактами и двумя входами управления, трехJQ фазный мостовой выпрямитель, трехфазный мостовой тиристорный инвертор, датчик скорости на валу электродвигателя, датчик тока, сглаживающий дроссель, блок управления инвертором с двумя входами и шестью выходами, элемент сравнения с двумя входами, задатчик скорости, одни выводы силовых контактов сетевого контактора снабжены зажимами для подключения фаз питающей сети, другие выводы си- ловых контактов сетевого контактора снабжены зажимами для подключения выводов статорной обмотки асинхронного электродвигателя, одни выводы
двух силовых контактов тормозного контактора соединены с другими выводами двух силовых контактов сетевого контактора, вход трехфазного мостового вьшрямителя подключен к выводам роторной обмотки асинхронного электродвигателя, точка соединения катодов вентилей трехфазного мостового выпрямителя подключена к точке соединения анодов тиристоров трехфазного мостового тиристорного инвертора, точка соединения анодов вентилей трехфазного мостового вьшрямителя через соединенные последовательно датчик тока и сглаживающий
Таким образом, введение управляемого трехфазного выпрямителя с нулевой точкой, блока управл€;ния жением обратной связи, блока выбора режима работы и блока управления контакторами позволяет реализовать режим динамического торможения без понижающего трансформатора и без пульН саций тока динамического торможения
6
для значения
значений S, (3 строят
-dp
21
заданных
По уравнению (3)
f(V
при I
dp
21
dpH
Пересечение этих графиков определит расчетное значение I
в
Из уравнения (1) для известных величин 1, , р определяют величину угла управления d управляемого трехфазного выпрямителя
i
Формулаизобр етения
5
0
Устройство для управления асинхронным электродвигателем с фазным
5 ротором, содержащее сетевой контактор с тремя силовыми контактами и двумя входами управления, тормозной контактор с двумя силовыми контактами и двумя входами управления, трехQ фазный мостовой выпрямитель, трехфазный мостовой тиристорный инвертор, датчик скорости на валу электродвигателя, датчик тока, сглаживающий дроссель, блок управления инвертором с двумя входами и шестью выходами, элемент сравнения с двумя входами, задатчик скорости, одни выводы силовых контактов сетевого контактора снабжены зажимами для подключения фаз питающей сети, другие выводы си- ловых контактов сетевого контактора снабжены зажимами для подключения выводов статорной обмотки асинхронного электродвигателя, одни выводы
двух силовых контактов тормозного контактора соединены с другими выводами двух силовых контактов сетевого контактора, вход трехфазного мостового вьшрямителя подключен к выводам роторной обмотки асинхронного электродвигателя, точка соединения катодов вентилей трехфазного мостового выпрямителя подключена к точке соединения анодов тиристоров трехфазного мостового тиристорного инвертора, точка соединения анодов вентилей трехфазного мостового вьшрямителя через соединенные последовательно датчик тока и сглаживающий
0
5
дроссель подключена к точке соединения .катодов тиристоров трехфазного мостового тиристорного инвертора, входные выводы которого снабжены зажимами для подключения фаз питающей сети, один вход управления сетевого контактора подключен к соответствующему входу управления тормозного контактора, выход задатчика скорости подключен к одному входу элемента сравнения, выход которого подключен к одному входу блока управления инвертором, другой вход которого подключен к выходу датчика тока, отличающееся тем, что, с целью снижения массы, габаритов и повьшения КПД, в него введены управляемый трехфазный тиристорный выпрямитель с нулевой точкой, задатчик
выходом, подключенным к другим входам управления указанных контакторов, выход датчика скорости подключен к одним входам блока управления напряжением обратной связи и блока управления сетевым и тормозным контакторами, другие входы которых подключены соответственно к первому и второму выходам задатчика режима работы, третий выход которого подключен к входу задатчика скорости, выход блока управления напряжением обратной связи подключен к другому входу элемента сравнения, другой вывод первого силового контакта тормозного контактора подключен к точке соединения анодов тиристоров управляемого трехфазного тиристорного выпрямителя, катоды которых предназначены для
10
15
режима работы с тремя выходами, блок 20 подключения фаз питакяцей сети, другой
управления напряжением обратной связи с двумя входами и одним выходом, блок управления сетевым и тормозным контакторами с двумя входами и одним
Редактор С.Пекарь Заказ 6852/57
Составитель В.Алешечкин
Техред В.Кадар Корректор А.Тяско
Тираж 631Подписное
ВНИИПИ Государственного крмитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
790368
выходом, подключенным к другим входам управления указанных контакторов, выход датчика скорости подключен к одним входам блока управления напряжением обратной связи и блока управления сетевым и тормозным контакторами, другие входы которых подключены соответственно к первому и второму выходам задатчика режима работы, третий выход которого подключен к входу задатчика скорости, выход блока управления напряжением обратной связи подключен к другому входу элемента сравнения, другой вывод первого силового контакта тормозного контактора подключен к точке соединения анодов тиристоров управляемого трехфазного тиристорного выпрямителя, катоды которых предназначены для
10
15
вывод второго силового контакта тормозного контактора подключен к точке соединения выводов датчика тока и сглаживакмцего дросселя.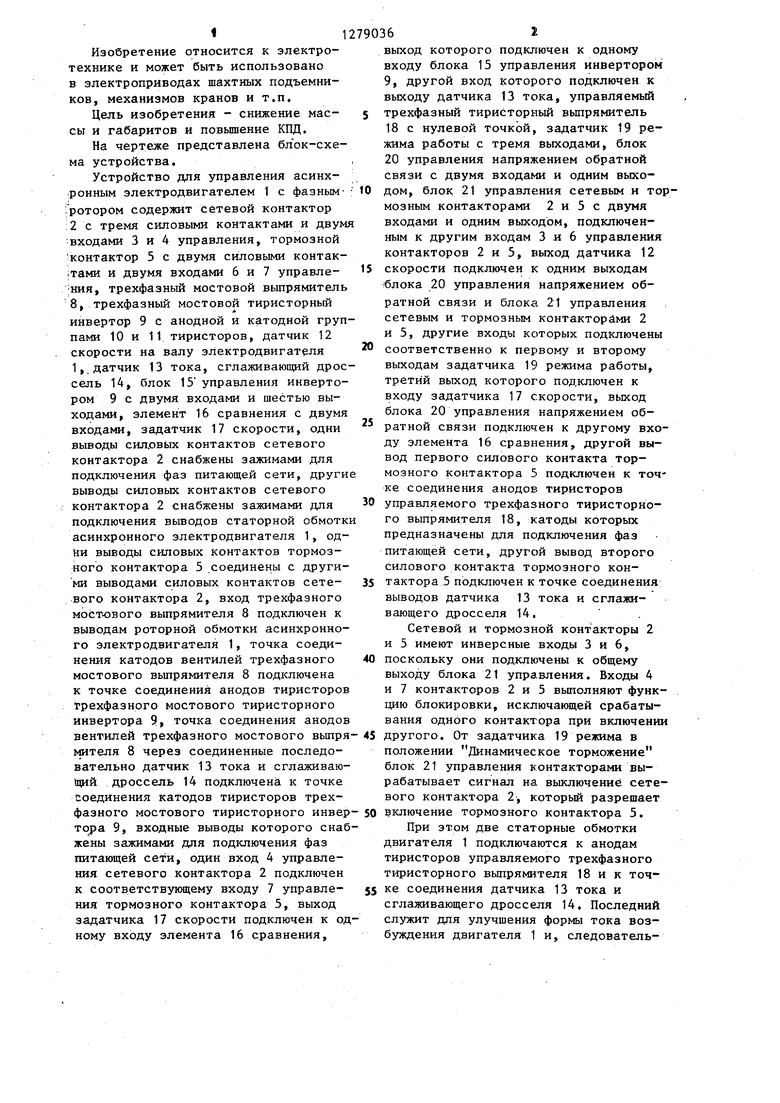
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ | 2013 |
|
RU2525294C1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Электропривод переменного тока | 1985 |
|
SU1319215A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Реверсивный тиристорный преобразователь частоты | 1975 |
|
SU680123A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2227364C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Электропривод | 1980 |
|
SU930544A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2003 |
|
RU2242082C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводе шахтных подъемников, механизмов, кранов и т.п. Цель изобретения - снижение массы и габаритов и повышение КПД. Для достижения указанной цели в устр-во для управления асинхронным электродвигателем с фазным ротором, выполненным по схеме АВК, введены управляемый трехфазный выпрямитель 18 с нулевой точкой, задатчик 19 режима работы, блок 20 управления напряжением обратной связи, блок 21 управления сетевым и тормозным контакторами 2, 5. При переходе устр-ва к режиму динамического торможения включается выпрямитель 18 с нулевой точкой, благодаря чему через статорные обмотки двигателя протекает пост. ток. Благодаря предложенной схеме устр-ва обеспечивается питание статорной обмотки пониженным напряжением через сглажи- ваюпщй дроссель 14, что приводит к снижению пульсации вьтрямленного тока и устранению согласующего тиристора. Следствием этого является повышение КПД и уменьшение массы и габаритов устр-ва. 1 ил. с (Л

| Онищенко Г.Б | |||
| Асинхронный вентильный каскад | |||
| - М.: Энергия, 1967, с | |||
| Способ получения камфоры | 1921 |
|
SU119A1 |
| Сандлер А.С., Тарасенко Л.М | |||
| Динамика каскадных асинхронных электроприводов | |||
| - М.: Энергия, 1977, с | |||
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
