Данное изобретение относится к электроприводам механизмов подъема и опускания груза грузоподъемных машин с устройствами управления.
В практике широко известны электроприводы механизмов подъема и опускания груза грузоподъемных кранов с динамическим торможением самовозбуждением электродвигателей с фазным ротором.
Известен электропривод подъема и опускания груза грузоподъемного крана, в котором электродвигатель начинает опускать груз после замыкания переключателя, при этом заданная скорость спуска груза определяется напряжением, снимаемым с клемм, причем реле привода при его включении замыкает соответствующие контакты, срабатывает контактор привода, фазовая схема блока управления включает управляемые вентили и запускает электродвигатель, создавая полный момент на его валу. По мере ускорения электродвигателя, напряжение, снимаемое с тахогенератора, возрастает и вычитается из заданного напряжения таким образом, что напряжение, поступающее в блок управления, уменьшается, блок управления задерживает запускающие импульсы, подаваемые на управляемые вентили, напряжение на статоре электродвигателя уменьшается. Если момент, создаваемый грузом, превышает момент, создаваемый электродвигателем, то сигнал рассогласования меняет знак, один контактор привода замыкается, а другой контактор привода размыкается. При этом блок управления увеличивает напряжение на статоре электродвигателя и создает тормозной момент [1].
Известен электропривод лебедки подъема и спуска подъемника, который содержит систему управления электродвигателем, скорость которого регулируется в широком диапазоне от нуля до максимальной скорости в режиме полной нагрузки, как в режиме спуска, так и в режиме подъема, причем система управления электроприводом обеспечивает автоматическое изменение скорости вращения электродвигателя в режиме спуска в зависимости от веса нагрузки. Скорость свободного падения относительно легкой нагрузки может составлять до 275% от синхронной скорости электродвигателя, а в случае тяжелой нагрузки скорость спуска замедляется и ограничивается на уровне синхронной скорости. Этот электропривод содержит электродвигатель с фазным ротором, механический тормоз привода, выпрямитель тормоза, первичную и вторичную цепи электродвигателя, электромагнитный тормоз нагрузки, резисторные цепи [2].
Известен электропривод механизма подъема крана, содержащий асинхронный электродвигатель с фазным ротором, обмотка статора которого через ключи направления вращения подключена к источнику переменного напряжения, пускотормозной резистор, включенный в цепь обмотки ротора, и асинхронный двухскоростной короткозамкнутый электродвигатель, в цепи обмоток статора которого включены ключи большой и малой скоростей, причем электропривод снабжен тиристорным коммутатором, вход которого связан с пускотормозными резисторами, а управляющие электроды тиристоров через распределитель импульсов и пороговый элемент связаны с цепью обмотки ротора и нагрузочным резистором, подключенным к выходу коммутатора, при этом обмотки статора двухскоростного электродвигателя через указанные ключи большой и малой скоростей соединены с обмоткой статора электродвигателя с фазным ротором [3].
Известен электропривод, содержащий два асинхронных электродвигателя с короткозамкнутым ротором, два силовых и два реверсивных контактора с катушкой и тремя силовыми контактами каждый, одни выводы которых попарно объединены и присоединены к соответствующим выводам обмоток электродвигателей, другие выводы силовых контактов пофазно объединены и подключены к одним выводам параллельно включенных трехфазных автоматических переключателей, при этом привод содержит силовые и реверсивные контакторы с катушками и силовыми контактами, блок переключений, шаговый искатель, реле управления с катушкой, реле выбора направления вращения с катушкой, реле времени паузы с катушкой, реле времени работы с катушкой, ключи и контакты, состоянием которых определяется программа работы электропривода, при этом разнообразие программ обеспечивает возможность расширения области применения двухдвигательного привода [4].
Известен электропривод механизма подъема и опускания груза грузоподъемного крана, содержащий основной электродвигатель с фазным ротором, вспомогательный двухскоростной электродвигатель, установленный на валу основного электродвигателя, электродвигатели гидротолкателей тормоза, командоконтроллер управления с цепями подъема, спуска и переключения ступеней скорости основного электродвигателя, блок управления упомянутыми электродвигателями, включающий цепи с контакторами торможения, подъема и спуска груза, сетевой контактор и контакторы переключения ступеней скорости, контакторы малой и большой скоростей подъема и спуска груза, контактор динамического торможения, при этом командоконтроллер управления и блок управления электродвигателями соединены упомянутыми цепями с источником подпитки, а статорные обмотки электродвигателя гидротолкателей тормоза через контакты 1КМЗ подключены к одноименным фазам основного электродвигателя, которые через контакты - 1А3, 1В3, 1С3 и контакты 1С2, один из которых шунтирован контактами 1КМ1 и 1КМ2, - подключены к питающей сети, обмотки высокой и низкой скоростей вспомогательного электродвигателя подключены соответственно через контакты 1КМ12 и 1КМ11 к одноименным фазам статорной обмотки основного электродвигателя, причем электропривод имеет трехфазный мостовой выпрямитель, основные и дополнительный резисторы, первые выводы основных резисторов соединены с фазными выводами обмотки ротора основного электродвигателя, первые выводы дополнительных резисторов соединены между собой, а вторые их выводы подключены к выводам переменного тока трехфазного мостового выпрямителя, а также блок резисторов, составленный из трех групп резисторов, причем первые выводы резисторов каждой группы соединены со вторым выводом резистора соответствующей фазы обмотки ротора основного электродвигателя, который через контакт 1КМ10 соединен со вторым выводом резистора соответствующей группы блока резисторов, подключенного ко вторым выводам двух других резисторов этой группы через контакты 1КМ9 и 1КМ8 соответственно и подключенного к соответствующему выводу трехфазного мостового выпрямителя переменного тока, при этом группы резисторов упомянутого блока резисторов соединены между собой вторыми выводами резисторов через контакты 1КМ7, катодный вывод трехфазного мостового выпрямителя соединен с электроприводом через реле максимального тока 1КА1, диод динамического торможения, резистор 1R и первый контакт 1КМ5 соединен с первой фазой статорной обмотки основного электродвигателя, третья фаза которого через контакт 1КМ5 соединена с анодным выводом трехфазного мостового выпрямителя, причем реле минимального тока 1КА2 через второй диод динамического торможения и контакты 1КМ6 подключено к первой и третей фазам основного электродвигателя [5].
Данный электропривод имеет вспомогательный электродвигатель, существенно усложняющий конструкцию.
Известно, что электроприводы механизмов подъема груза, применяемые в конструкциях кранов, выполненные на основе асинхронного двигателя с фазным ротором с динамическим торможением самовозбуждением, являются наиболее распространенными, при этом в таких электроприводах режим динамического торможения самовозбуждением позволяет получить жесткие механические характеристики при достаточном для большинства кранов диапазоне регулирования скорости [6].
Однако режим динамического торможения самовозбуждением имеет существенный недостаток, заключающийся в невозможности опускания легкого (не преодолевающего потерь в механических передачах - 3-й квадрант механических характеристик) груза. Причем масса такого груза в зависимости от значения КПД механизмов крана может достигать 20% от номинальной грузоподъемности.
Для исключения указанного недостатка в схему электропривода вводится дополнительный электродвигатель, имеющий большое число полюсов (как правило, 24). При работе электродвигателя в режиме динамического торможения самовозбуждением вспомогательный электродвигатель включается в направлении спуска. При этом путем сложения механических характеристик динамического торможения самовозбуждением и механической характеристики вспомогательного электродвигателя получается суммарная характеристика, лежащая во втором и третьем квадрантах.
Данная схема электроприводов широко применяется, например, в электроприводах механизмов подъема и опускания грузов, в частности в приводах грузовых лебедок таких башенных кранов как КБ-403, КБ-404, КБ-405, КБ-406, КБ-408, КБМ-401П, КБ-415, КБ-515.05, КБ-572 и КБ-578.
Однако реализация режима динамического торможения самовозбуждением требует применения двухдвигательной лебедки специальной конструкции, что удорожает стоимость крана. Кроме того, такая лебедка имеет повышенные габариты, что не позволяет применять ее, например, на мостовых и козловых кранах.
Для получения режима силового спуска груза используется также режим импульсно-ключевого регулирования. В такой схеме, если груз не опускается в режиме динамического торможения, оператор нажимает специальную кнопку. При этом отключается режим динамического торможения, и электродвигатель включается в режим силового спуска, а малая скорость получается в режиме импульсно-ключевого регулирования. Такая схема применяется на некоторых модификациях кранов башенных КБ-309, КБ-408, КБМ-401П.
Однако данная схема работы известного электропривода [6] имеет ряд недостатков. Первый из них заключается в том, что в случае неправильных действий оператора (нажатие кнопки при опускании тяжелого груза) может произойти падение груза и разрушение механизма, поскольку опускание будет производиться на мягкой механической характеристике при скорости, намного превышающей синхронную. Для исключения указанного явления режим импульсно-ключевого управления включается под контролем ограничителя массы груза - специального прибора, измеряющего массу поднимаемого груза, и при размыкающем выходном контакте, срабатывающем в случае превышения грузом определенного допустимого порога.
Вторым недостатком является то, что даже при опускании легкого груза КПД механизма не является постоянной величиной, и при опускании некоторых грузов происходит неконтролируемый разгон электропривода из-за изменения знака статического момента.
Таким образом, существует потребность в устройствах, обеспечивающих силовой спуск легких грузов, при этом такое устройство должно обладать следующими двумя функциями. Во-первых, режим силового спуска должен осуществляться без применения вспомогательной электрической машины, и, во-вторых, устройство должно исключать неконтролируемый разгон электропривода без применения ограничителя массы груза при изменении КПД, при неверных действиях оператора или неисправности ограничителя массы груза.
Реализация указанных требований достигается известными устройствами электроприводов грузоподъемной машин, описанных в источниках информации [6 и 7], которые обеспечивают получение устойчивых малых скоростей в направлении подъема и спуска грузов, когда электродвигатель гидротолкателя тормоза переключается на кольца ротора. Такая схема применяется, в частности, в электроприводе механизма подъема гусеничных кранов типа ДЭК. Достоинством такой схемы является простота ее реализации, возможность получения малых скоростей как в режиме тормозного, так и силового спуска. Недостатками являются повышенный износ колодок тормоза, т.к. регулирование скорости, особенно в направлении спуска, осуществляется механическим притормаживанием.
Общими признаками представленного электропривода и наиболее близкого известного кранового электропривода механизма подъема груза является, что они содержат асинхронный электродвигатель с фазным ротором, который соединен с импульсно-ключевым регулятором, электродвигатель гидротолкателя, соединенный с контактором подключения гидротолкателя к электросети, соединенные с электросетью первый контактор направления электротока на подъем груза и второй контактор направления электротока на спуск груза, которые соединены с линейным контактором, подключенным к асинхронному электродвигателю [6].
Решаемой задачей представленного электропривода является повышение КПД электропривода и его безопасности.
Данная задача решается крановым электроприводом механизма подъема груза, содержащем асинхронный электродвигатель с фазным ротором, который соединен с импульсно-ключевым регулятором, электродвигатель гидротолкателя, соединенный с контактором подключения гидротолкателя к электросети, соединенные с электросетью первый контактор направления электротока на подъем груза и второй контактор направления электротока на спуск груза, которые соединены с линейным контактором, подключенным к асинхронному электродвигателю, временно или постоянно включенный в цепь электропривода трансформатор, который электрически соединен с кольцами ротора электродвигателя гидротолкателя через контактор подключения гидротолкателя к трансформатору, который электрически линией связи соединен с асинхронным электродвигателем таким образом, что соединения указанной линии связи расположены между импульсно-ключевым регулятором и асинхронным электродвигателем, причем электродвигатель гидротолкателя соединен с зажимами статора асинхронного электродвигателя посредством контактора подключения электродвигателя гидротолкателя к сети, а посредством контактора подключения электродвигателя гидротолкателя к кольцам ротора асинхронного электродвигателя электродвигатель гидротолкателя соединен с зажимами ротора асинхронного электродвигателя.
Таким образом, для осуществления режима силового спуска в электроприводах с динамическим торможением самовозбуждением использовано устройство управления электроприводом подъема и опускания груза с использованием электрогидравлического толкателя, работающего от электродвигателя гидротолкателя, при этом устройство содержит асинхронный электродвигатель с фазным ротором, средства подключения этого электродвигателя к сети питания по схеме движения «вверх» или «вниз», механический тормоз с электрогидравлическим толкателем, выполняющим кроме функций торможения функции регулятора скорости, причем в одном режиме работы привода двигатель тормоза или гидротолкателя подключается контактором к зажимам статора асинхронного электродвигателя и выполняет свои обычные функции аналогично электромагнитному приводу, а в другом режиме работы привода посредством второго контактора электродвигатель тормоза подключают к зажимам ротора электродвигателя, в результате чего последний одновременно становится источником питания электродвигателя гидротолкателя - асинхронным преобразователем частоты, обеспечивающим частотное регулирование скорости вращения электродвигателя.
Для согласования ЭДС ротора с номинальным напряжением питания гидротолкателя применяют трансформатор, который не является обязательным узлом устройства электропривода.
На фиг.1 представлен крановый электропривод механизма подъема груза в положении силового спуска пустого крюка и легких грузов,
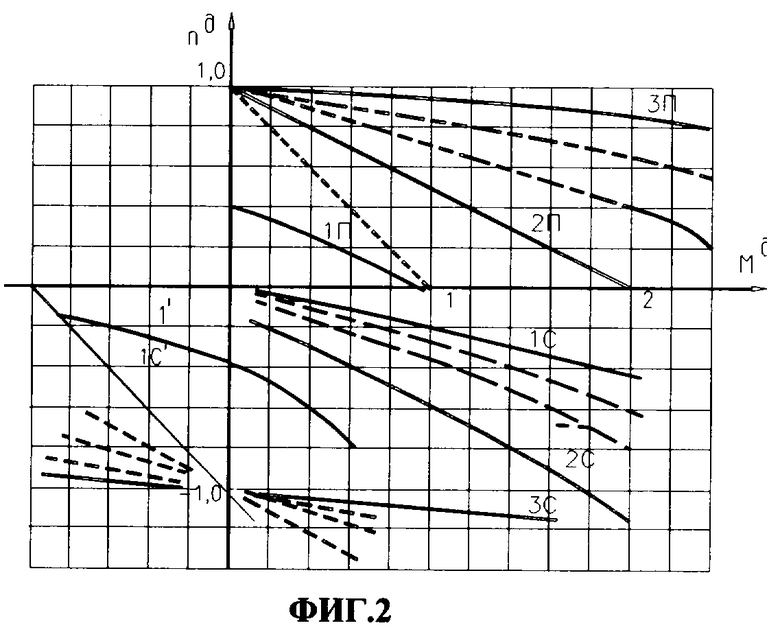
на фиг.2 - механические характеристики электропривода,
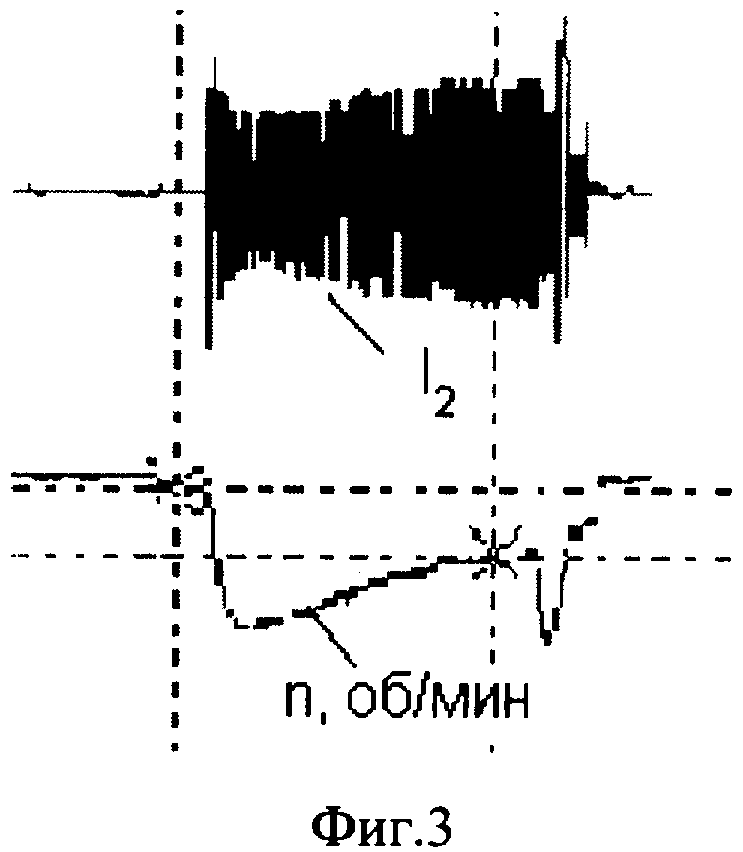
на фиг.3 - экспериментальные осциллограмммы скорости и тока ротора при силовом спуске груза с питанием гидротолкателя от электросети,
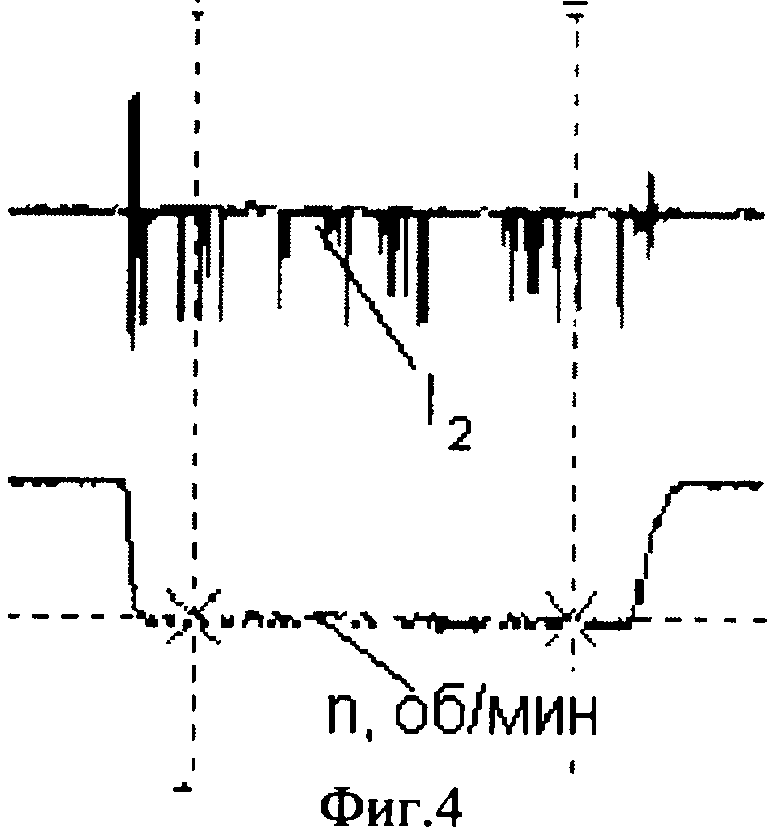
на фиг.4 - экспериментальные осциллограмммы скорости и тока ротора при силовом спуске груза с питанием гидротолкателя от цепи ротора,
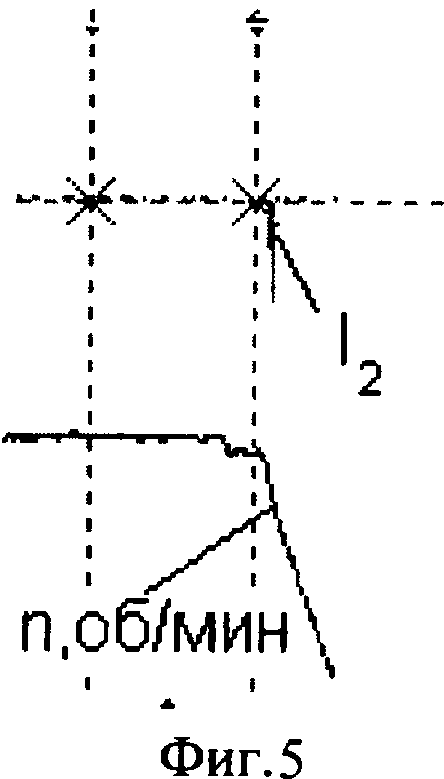
на фиг.5 - экспериментальные осциллограмммы скорости и тока ротора при переходе от силового спуска груза к тормозному, гидротолкатель питается от электросети,
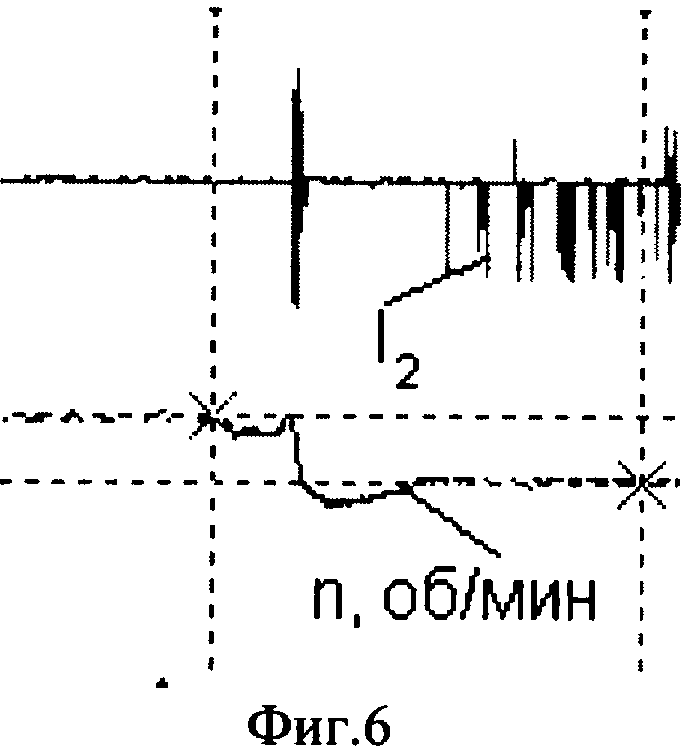
на фиг.6 - экспериментальные осциллограмммы скорости и тока ротора при переходе от силового спуска груза к тормозному, гидротолкатель питается от цепи ротора.
Крановый электропривод механизма подъема груза содержит асинхронный электродвигатель 1 с фазным ротором, соединенный с ним импульсно-ключевой регулятор 2, электродвигатель 3 гидротолкателя, соединенный с контактором 4 подключения гидротолкателя к электросети 5, соединенные с электросетью 5 первый контактор 6 направления электротока на подъем груза и второй контактор 7 направления электротока на спуск груза, которые соединены с линейным контактором 8, подключенным к асинхронному электродвигателю 1.
Электропривод содержит также временно или постоянно включенный в его цепь трансформатор 9, который электрически соединен с кольцами ротора электродвигателя 3 гидротолкателя через контактор 10. Трансформатор электрически соединен с асинхронным электродвигателем 1. Данное соединение расположено между импульсно-ключевым регулятором 2 и асинхронным электродвигателем 1 в точках 11. При этом электродвигатель 3 гидротолкателя подключен посредством контактора 4 к зажимам статора асинхронного электродвигателя 1, а посредством контактора 10 электродвигатель 3 гидротолкателя подключен к зажимам ротора асинхронного электродвигателя.
Работает крановый электропривод следующим образом.
Работа электропривода в направлении подъема груза осуществляется по известным схемам: подъем груза, показанный на характеристиках 1П...3П (фиг.2) осуществляется включенными контакторами 7 и 8 (1КМ1, 1КМ4), что соответствует импульсно-ключевому и реостатному регулированию скорости асинхронного электродвигателя 1 и скорости подъема груза.
Спуск тяжелых грузов производится на характеристиках динамического торможения самовозбуждением асинхронного электродвигателя 1 на характеристиках 1С...3С (фиг.2), что соответствует динамическому торможению и торможению при сверхсинхронной скорости. При этом во время работы электропривода электродвигатель 3 гидротолкателя получает питание от сети через замкнутые контакты контактора 4 (1КМ3).
Для получения малых скоростей в режиме силового спуска оператор переводит электропривод из режима динамического торможения самовозбуждением в режим силового спуска груза с импульсно-ключевым регулированием. При этом включаются контактор 7 (1КМ2), контактор 8 (1КМ4) и контактор 10 (1КМ31), и электродвигатель подключается к сети 5 в направлении спуска в режиме импульсно-ключевого регулирования. Этот режим спуска обеспечивается тиристорным импульсно-ключевым регулятором 2 (ИКР) во взаимодействии с цепью ротора электродвигателя 1. Во время работы электропривода электродвигатель 3 гидротолкателя контактором 10 (1КМ31) подключается кольцами ротора электродвигателя 3 гидротолкателя к трансформатору 9.
В результате полученная механическая характеристика электропривода 1C' (фиг.2) лежит в 3-м и 4-м квадрантах механических характеристик. На фиг.3-м и 4-м показаны осциллограммы скорости и тока ротора при пуске электропривода в режим силового спуска с грузом, не преодолевающим момента потерь в механизме, причем на фиг.3 осцилограмма соответствует работе электродвигателя 1 когда электродвигатель 3 гидротолкателя питается от сети 5, при этом импульсно-ключевой регулятор 2 закорочен, а на фиг.4 осцилограмма соответствует положению когда электродвигатель 3 гидротолкателя подключен к цепи ротора и импульсно ключевой регулятор 2 работает. При этом переходный процесс на фиг.3 носит колебательный характер, тогда как этот процесс на фиг.4 - апериодический.
На фиг.5 и 6 осциллограммы скорости и тока ротора электродвигателя 1 при переходе из силового спуска в тормозной (при опускании тяжелого груза в режиме импульсно-ключевого регулирования) указывают на нештатный режим работы. На фиг.5 видно, что при питании электродвигателя 3 гидротолкателя от сети происходит увеличение скорости (падение груза). При питании электродвигателя 3 гидротолкателя от цепи ротора груз опускается с установившейся скоростью.
В заявленном электроприводе в отличие от электропривода, описанного в [6], получение жесткой характеристики в режиме силового спуска производится импульсно-ключевым регулированием (ИКР). Гидротолкатель при этом питается стабильной частотой ниже номинальной (зависит от настройки блока ИКР), при диапазоне регулирования скорости 8:1 частота его питания составляет 45 Гц. Шток гидротолкателя практически поднят, тормоз создает весьма небольшой тормозной момент с минимальным износом колодок.
В случае изменения знака статического момента (переход из 3-й в 4-й квадрант) электропривод начинает разгоняться, частота ЭДС ротора падает, снижается скорость вращения насоса гидротолкателя, его шток начинает опускаться, при этом возрастает тормозной момент. Электропривод начинает затормаживаться и устанавливается стабильная скорость.
В предельном случае, при опускании номинального груза в режиме динамического торможения самовозбуждением и случайном переходе груза в режим ИКР в результате неправильных действий оператора или неисправности ограничителя массы груза, падения груза не происходит и производится его опускание с устойчивой малой скоростью, примерно в 3 раза меньше номинальной.
Таким образом, в отличие от известного электропривода в электроприводе представленной конструкции гидротолкатель используется не для регулирования скорости, а в качестве устройства предохранения от неконтролируемого разгона груза при изменении КПД или от неправильных действий оператора. Тормозной спуск в предлагаемой схеме осуществляется в режиме динамического торможения самовозбуждением.
Источники информации
1. GB 1129492 А, 09.10.1968.
2. US 3772579 A, 13.11.1973.
3. SU 1708748 A1, 30.01.1992.
4. SU 1741246 A1, 15.06.1992.
5. RU 2298520 C2, 20.04.2004.
6. Соколов М.М. Автоматизированный электропривод общепромышленных механизмов. М.: 1976, с.484 (прототип).
7. А.К.Аракелян и М.М.Соколов. Асинхронный регулируемый электропривод с электрогидравлическим толкателем. М.: ЭНЕРГИЯ, 1972, с.7-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для динамического торможения асинхронного электродвигателя с фазным ротором | 1976 |
|
SU613469A1 |
| Устройство для управления лебедкой | 1981 |
|
SU981196A1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИМПУЛЬСНО-КЛЮЧЕВЫМ КОММУТАТОРОМ | 2002 |
|
RU2249297C2 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
Изобретение относится к электроприводам механизмов подъема и опускания груза грузоподъемных машин с устройствами управления. Устройство содержит асинхронный электродвигатель с фазным ротором, импульсно-ключевой регулятор, электродвигатель гидротолкателя, контактор подключения гидротолкателя к электросети, первый контактор направления электротока на подъем груза и второй контактор направления электротока на спуск груза, линейный контактор, временно или постоянно включенный в цепь электропривода трансформатор. Технический результат заключается в повышении КПД электропривода и его безопасности. 6 ил.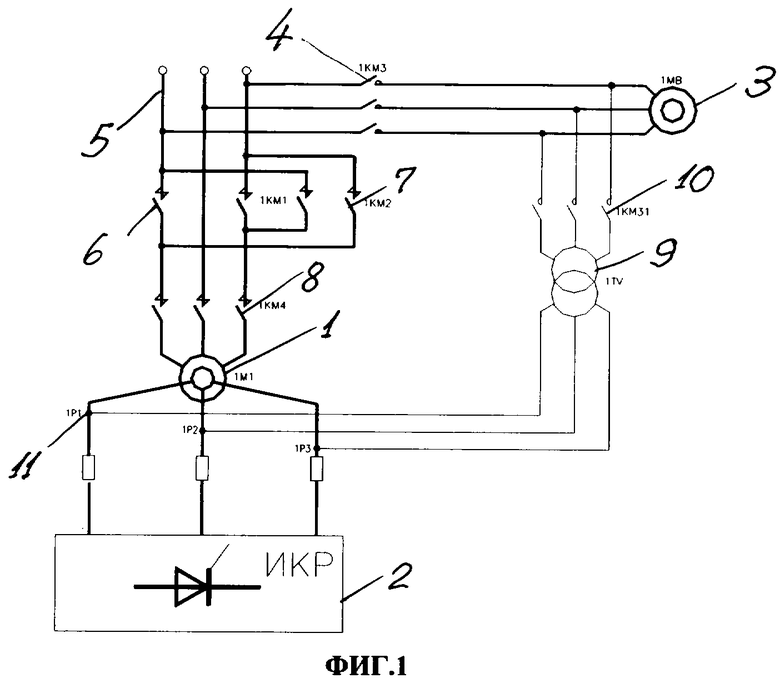
Крановый электропривод механизма подъема груза, содержащий асинхронный электродвигатель с фазным ротором, который соединен с импульсно-ключевым регулятором, электродвигатель гидротолкателя, соединенный с контактором подключения гидротолкателя к электросети, соединенные с электросетью первый контактор направления электротока на подъем груза и второй контактор направления электротока на спуск груза, которые соединены с линейным контактором, подключенным к асинхронному электродвигателю, временно или постоянно включенный в цепь электропривода трансформатор, который электрически соединен с кольцами ротора электродвигателя гидротолкателя через контактор подключения гидротолкателя к трансформатору, который электрически линией связи соединен с асинхронным электродвигателем таким образом, что соединения указанной линии связи расположены между импульсно-ключевым регулятором и асинхронным электродвигателем, причем электродвигатель гидротолкателя соединен с зажимами статора асинхронного электродвигателя посредством контактора подключения электродвигателя гидротолкателя к сети, а посредством контактора подключения электродвигателя гидротолкателя к кольцам ротора асинхронного электродвигателя электродвигатель гидротолкателя соединен с зажимами ротора асинхронного электродвигателя.
| Соколов М.М | |||
| Автоматизированный электропривод общепромышленных механизмов | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Устройство для торможения асинхронного электродвигателя | 1982 |
|
SU1086532A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| JP 3082381 A, 08.04.1991. | |||

