Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к устройствам для ориентации движения самоходных сельскохозяйственных машин машинно-тракторных агрегатов, выполняющих различные технологические операции, в частности обработку почвы и растений.
Целью изобретения является повышение точности вождения агрегата по изофазным линиям электромагнитного поля и обеспечение регулировки требуемого расстояния между изофазными линиями.
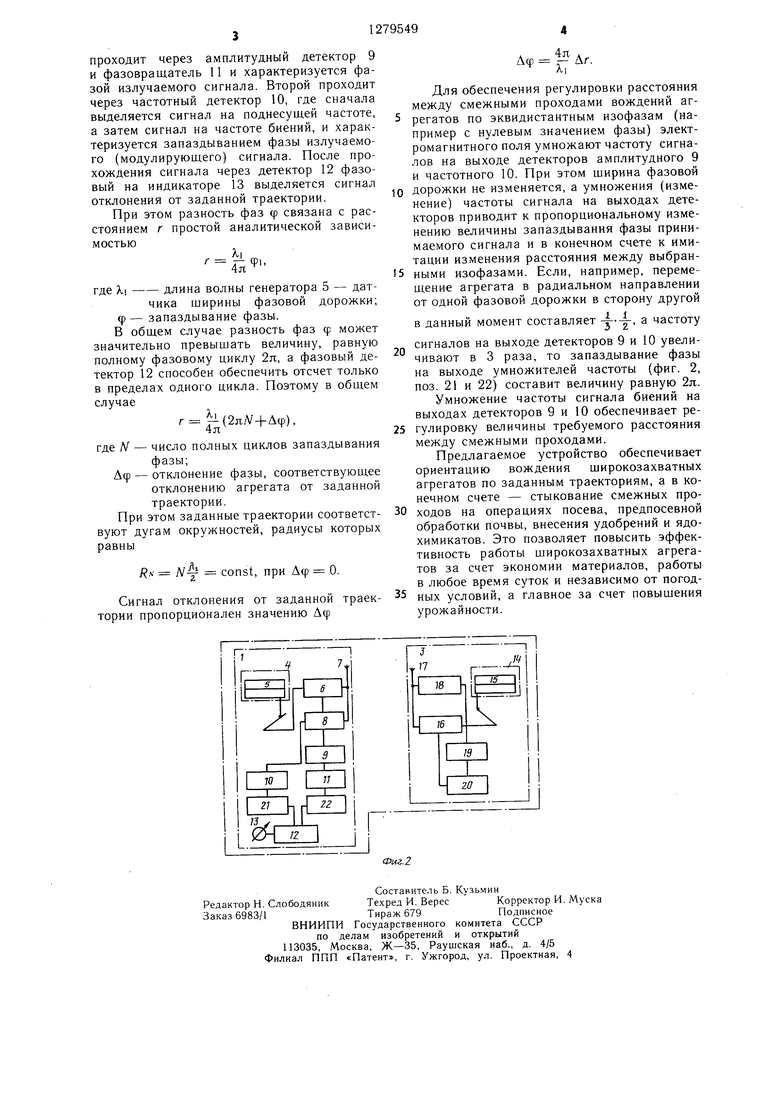
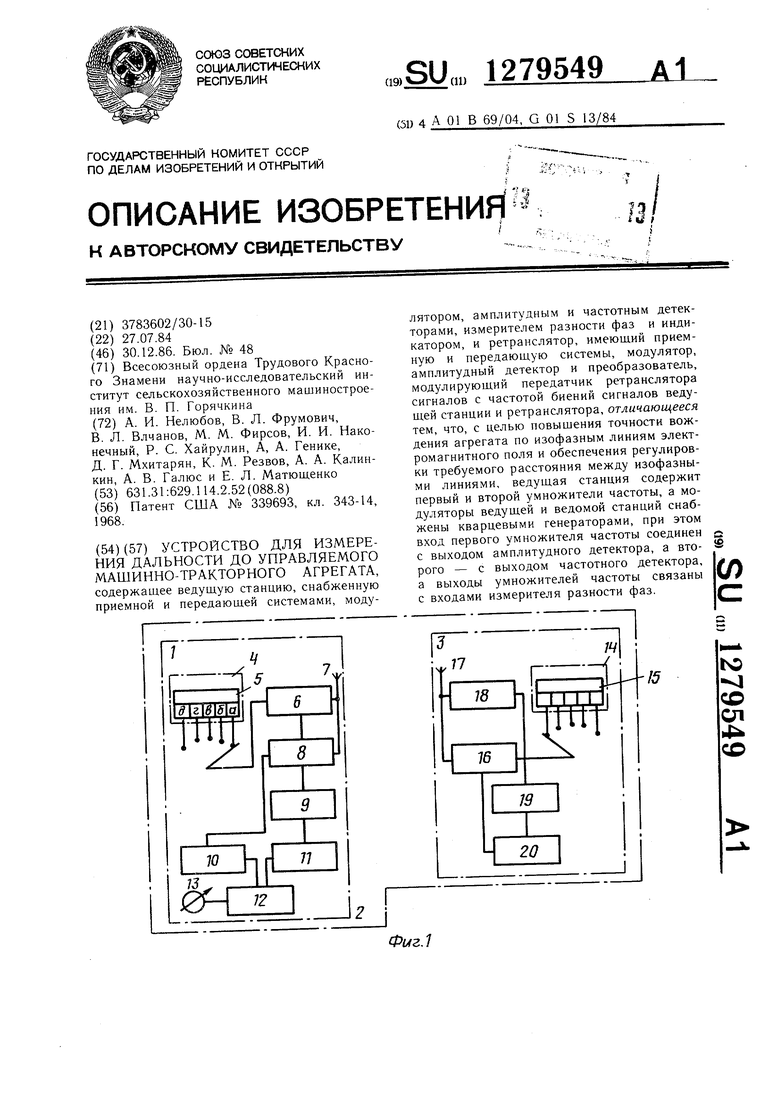
На фиг. 1 изображена блок-схема устройства для измерения дальности до управляемого машинно-тракторного агрегата; на фиг. 2 - блок-схема устройства с умножителями частоты на выходах амплитудного и частотного детекторов.
Устройство для измерения дальности до управляемого машинно-тракторного агрегата содержит ведушую станцию 1, расположенную на машинно-тракторном агрегате (МТА) или самоходной сельскохозяйственной машине 2, и ретранслятор 3, устанавливаемый в навигационной точке на краю поля.
В ведущую станцию 1 входят модулятор 4 снабженный кварцевыми генераторами 5 - датчиками ширины фазовой дорожки, генератор 6 сигналов, антенна 7 приемопередающая, приемник 8, детекторы а.мплитудный 9 и частотный 10, фазовращатель 11, детектор 12 фазовый, индикатор 13 отклонения от заданной траектории.
В ретранслятор 3 входят модулятор 14, снабженный вспомогательными генераторами 15, генератор 16 сигналов, антенна 17 приемопередающая, приемник 18, детектор 19 амплитудный, преобразователь 20 и умножители 21 и 22 частоты.
Блоки, входящие в ведущую станцию, соединены следующим образом: генератор 6 сигналов с модулятором 4 и приемопередающей антенной 7, а последняя - с приемником 8, выходы которого соединены, первый - с фазовращателем 11, который соединен последовательно с амплитудным детектором 9, а второй - с частотным детектором 10. Выходы детекторов амплитудного 9 и через фазовращатель И и частотного 10 соединены с детектором 12 фазовым, а последний - с индикатором 13 отклонения от заданной траектории.
Блоки ретранслятора соединены: генератор 16 сигналов с модулятором 14, снабженным вспомогательными генераторами 15, и антенной 17 приемопередающей, а последняя - с приемником 18, выход которого последовательно соединен с детектором 19 амплитудным, преобразователем 20 и генератором 16 сигналов. В основу работы устройства положен способ вождения мобильных сельскохозяйственных машин, включающий выработку сигнала отклонения от
траектории, которые с целью упрощения задают совпадающими с эквидистантными линиями положения - изофазами электромагнитного поля, в частности дугами окруж- ностей, центр которых расположен в навигационной точке; по этому сигналу осуществляют управляющее воздействие.
Выработка сигнала отклонения от траекторий, заданных в виде дуг окружностей г const, производится фазовым способом. Фаза (ф) распространяющейся в пространстве электромагнитной волны, пропорциональная пройденному ею расстоянию г, равна
Ф fe-r,
где k - коэффициент пропорциональности; г - радиус дуг окружностей. Измеряя изменение (запаздывание) фазы напряженности электрического (магнитного) поля волны, прошедшей путь от веду0 щей станции I до ретранслятора 3 и обратно, относительно фазы излучаемого сигнала, определяют соответствующее ей расстояние. В качестве образцовых расстояний, соответствующих заданным ширинам захвата агрегатов, используют длину волны коле баний генераторов 5 - датчиком ширины фазовой дорожки. Сигнал одного из генераторов 5, соответствующий конкретной (требуемой) ширине захвата агрегата 2, модулирует по частоте сверхвысокочастотf. ный (СВЧ) сигнал генератора 6 сигналов, ко торый излучается антенной приемопередающей 7 ведущей станции. Одновременно, во встречном направлении, излучается частотно-модулированный сигнал приемопередающей антенной 17 ретранслятора 3. При этом
с СВЧ-сигналы генераторов 6 и 16 сигналов отличаются на величину промежуточной частоты, а модулирующие по частоте сигналы генератора 5 и вспомогательного генератора 15 - на величину частоты биений. При этом частотно-модулированные СВЧсигналы ведущей станции 1, принятые приемопередающей антенной 17, поступают на вход (смеситель) приемника 18 вместе с частью сигнала, излучаемого ретранслятором 3, усиливаются на промежуточной частоте и выделяются в виде сигнала частоты биений на выходе амплитудного детектора 19. После прохождения через преобразователь 20 сигнал на частоте биений модулирует по частоте новый сигнал на под- несущей частоте (допустима прямая модуQ ляция без сигнала на поднесущей частоте). Таким образом, СВЧ-сигнал ретранслятора 3 с двойной частотной модуляцией, сигналами вспомогательного генератора и биений (на поднесущей) после излучения приемопередающей антенной 17, а затем приема приемо5 передающей антенной 7 ведущей станции 3 и прохождения через приемник 8 (с частью сигнала, излучаемого ведущей станцией 1) разделяется на два сигнала. Один из них
проходит через амплитудный детектор 9 и фазовращатель 11 и характеризуется фазой излучаемого сигнала. Второй проходит через частотный детектор 10, где сначала выделяется сигнал на поднесущей частоте, а затем сигнал на частоте биений, и характеризуется запаздыванием фазы излучаемого (модулирующего) сигнала. После прохождения сигнала через детектор 12 фазовый на индикаторе 13 выделяется сигнал отклонения от заданной траектории.
При этом разность фаз ф связана с расстоянием г простой аналитической зависимостью
-Ь
где К длина волны генератора 5 - датчика щирины фазовой дорожки;
Ф - запаздывание фазы.
В общем случае разность фаз ф может значительно превышать величину, равную полному фазовому циклу 2л, а фазовый детектор 12 способен обеспечить отсчет только в пределах одного цикла. Поэтому в общем случае
г (2я/У4-Аф),
где jV - число полных циклов запаздывания
фазы;
Аф - отклонение фазы, соответствующее отклонению агрегата от заданной траектории.
При этом заданные траектории соответствуют дугам окружностей, радиусы которых равны
. Л/ф const, при Лф 0.
Сигнал отклонения от заданной траектории пропорционален значению Дф
4л. ж
Аф ;г- АГ.
ч
Для обеспечения регулировки расстояния между смежными проходами вождений аг5 регатов по эквидистантным изофазам (например с нулевым значением фазы) электромагнитного поля умножают частоту сигналов на выходе детекторов амплитудного 9 и частотного 10. При этом щирина фазовой
0 дорожки не изменяется, а умножения (изменение) частоты сигнала на выходах детекторов приводит к пропорциональному изменению величины запаздывания фазы принимаемого сигнала и в конечном счете к имитации изменения расстояния между выбран5 ными изофазами. Если, например, перемещение агрегата в радиальном направлении от одной фазовой дорожки в сторону другой
в данный момент составляет -4-4-, а частоту
сигналов на выходе детекторов 9 и 10 увеличивают в 3 раза, то запаздывание фазы на выходе умножителей частоты (фиг. 2, поз. 21 и 22) составит величину равную 2л;.
Умножение частоты сигнала биений на выходах детекторов 9 и 10 обеспечивает ре- 5 гулировку величины требуемого расстояния между смежными проходами.
Предлагаемое устройство обеспечивает ориентацию вождения щирокозахватных агрегатов по заданным траекториям, а в конечном счете - стыкование смежных проходов на операциях посева, предпосевной обработки почвы, внесения удобрений и ядохимикатов. Это позволяет повысить эффективность работы щирокозахватных агрегатов за счет экономии материалов, работы в любое время суток и независимо от погодных условий, а главное за счет повыщения урожайности.
0
0
Составитель Б. Кузьмин
Редактор Н. СлободяникТехред И. ВересКорректор И. Муска
Заказ 6983/1Тираж 679Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, т. Ужгород, ул. Проектная, 4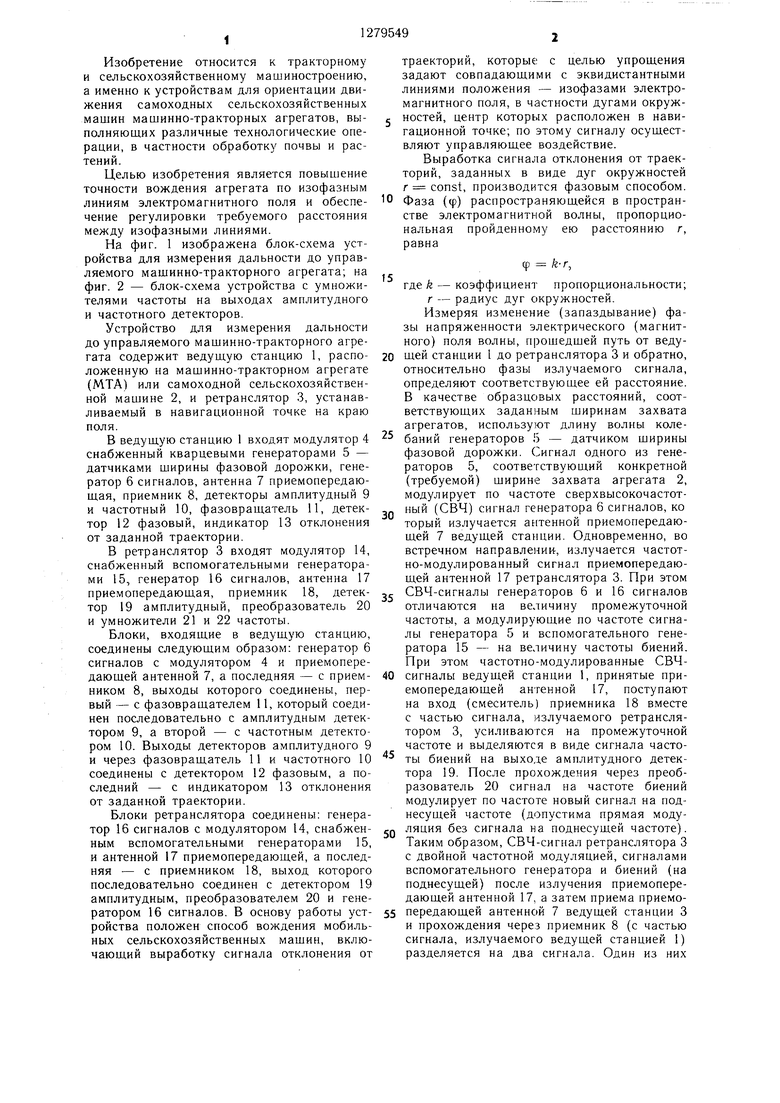
| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор полосы формирования валков для порционных жаток-накопителей | 1990 |
|
SU1729312A1 |
| Способ вождения мобильных сельскохозяйственных агрегатов | 1984 |
|
SU1274637A1 |
| Устройство для определения координат машинно-тракторного агрегата | 1990 |
|
SU1701137A1 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Способ автоматического вождения сельскохозяйственного агрегата | 1989 |
|
SU1672949A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1992 |
|
RU2042144C1 |
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1991 |
|
RU2048677C1 |
| СЦЕПНАЯ МУФТА С ПОВОРОТНОЙ ШПОНКОЙ | 0 |
|
SU339693A1 |
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
