Изобретение относится к сельскохозяйственному производству, в частности к способам автоматического вождения сельскохозяйственных агрегатов на плантации, снабженной навигационными точками, например ретрансляторами или уголковыми отражателями.
Цель изобретения - упрощение автоматического вождения сельскохозяйственного агрегата на плантации квазикруглой формы.
На чертеже представлена схема движения агрегатов по Эквидистантным концентрическим сопряженным в спираль траекториям.
Навигационные точки-ретрансляторы 1 и 2 располагают в центре плантации, расстояние между которыми равняется половине ширины рабочего захвата сельскохозяйственного агрегата.
Диаграммы направленности антенн каждого ретранслятора имеют ширину 180° и направлены в противоположные стороны: ретранслятора 1 в сторону траекторных полуокружностей 3 с нечетными радиусами RI, Вз. RS.-... а ретранслятора 2 в сторону траекторных полуокружностей 4 с четными радиусами R2. R4. ReДлина волны А масштабной
частоты приемопередатчика Д.- В или NA В. где N 1, 2, 3,...; В - ширина рабочего захвата сельскохозяйственного агрегата. Линия 5 является границей обрабатываемой полосы плантации смежных эквидистантных проходов сельскохозяйственного агрегата.
Разность фаз представляет собой периодическую пилообразную функцию (позиция 6)
-$Н.
где А- длина волны масштабной частоты;
R - расстояние от электрического центра антенны с соответствующей направленностью диаграммы (или от соответствующего уголкового отражателя).
По линии 7 разность фаз &р от обоих ретрансляторов совпадает, чем достигают последовательное сопряжение равносиг- нальных полуокружностей обоих семейств в
непрерывную спираль траектории движения сельскохозяйственного агрегата (СХА). В основу способа автоматического вождения СХА положено использование значения функции &р как сигнала рассогласования
пропорционального отклонения электрического центра антенны приемопередатчика (следовательно, и агрегата) от траекторной линии, который подают на вход системы автоматического вождения, например, типа
САУ-Ш кукурузоуборочного комбайна Херсонец-200.
В исходной позиции сельскохозяйственный агрегат устанавливают перед ретранслятором 2 так, чтобы правый край
оказался у ретранслятора 1, а электрический центр антенны приемопередатчика агрегата оказался на полуокружности радиуса RI с разницей фаз Др электромагнитного поля, возбуждаемого между приемопередатчиком и ретранслятором 1. равной, например, нулю.
Включают ход СХА. При отклонении агрегата вправо (внутрь полуокружности радиуса R1) /ty уменьшается, а влево - увеличивается, что используют как сигнал рассогласования и подают на вход следящей системы автовождения. В исходной позиции и при движении агрегата по полуокружности радиуса RI приемопередатчик находится в
ширине диаграммы направленности антенны ретранслятора 1. При подходе агрегата по полуокружности радиуса RI к точке 8(и в ее ближайшей окрестности) приемопередатчик входит и в ширину диаграммы направленности антенны ретранслятора 2. В точке 8 значение разницы фаз &р масштабной частоты электромагнитных полей, формируемых приемопередатчиком агрегата и
обоими ретрансляторами, совпадают. Тем самым обеспечивают сопряжение траек- торных полуокружностей радиусов RI и R2
При дальнейшем своем движении агрегат выходит из ширины диаграммы направленности антенны ретранслятора 1, но остается в ширине диаграммы направленности антенны ретранслятора 2 и продолжает двигаться по полуокружности радиуса R2 до точки 9 - сопряжения траекторных полуокружностей радиусов R2 и RS, в которой значения разницы фаз &р масштабной частоты электромагнитных полей, формируемых приемопередатчиком агрегата и обоими ретрансляторами, совпадают.
Далее агрегат движется по полуокружности радиуса Вз до точки 10 в ширине диаграммы направленности антенны ретранслятора 1, затем по полуокружности R до точки 11 в ширине диаграммы направленности антенны ретранслятора 2 и по спирали из сопряженных полуокружностей до конца обработки всей плантации. Аналогичным образом агрегат направляют и в обратном направлении - от периферии к центру,
Формула изобретения Способ автоматического вождения сельскохозяйственного агрегата, заключающийся в излучении сигнала приемопередающей станцией, расположенной на сельскохозяйственном агрегате, приеме его ретрансляторами и переизлучении, приеме
сигнала от ретрансляторов и сравнении по фазе излучаемого и принимаемого приемопередающей станцией сигналов, определении по запаздыванию фазы сигнала, принятого от данного ретранслятора, и излученного сигнала, мгновенных значений дальностей от сельскохозяйственного агрегата до ретрансляторов, определении текущих координат траектории движения сельскохозяйственного агрегата и определении сигнала отклонения текущих координат траектории движения агрегата от заданной,
совпадающей с эквидистантными изофазами электромагнитного поля, и коррекции по этим сигналам положения сельскохозяйственного агрегата, отличающийся тем, что, с целью упрощения автоматического вождения на плантации квазикруглой формы, ретрансляторы распологают на половине ширины захвата рабочего органа сельскохозяйственного агрегата, а при перемещении сельскохозяйственного агрегата в полуплоскости, расположенной с одной стороны от прямой, проходящей через ретрансляторы сигнала, в качестве принимаемого используют сигнал от первого ретранслятора, а в другой полуокружности используют принимаемый сигнал от второго ретранслятора, при этом в исходной позиции сельскохозяйственный агрегат располагают на указанной прямой
так, что торцовая часть и середина его рабочего органа совмещены соответственно с первым и вторым ретрансляторами.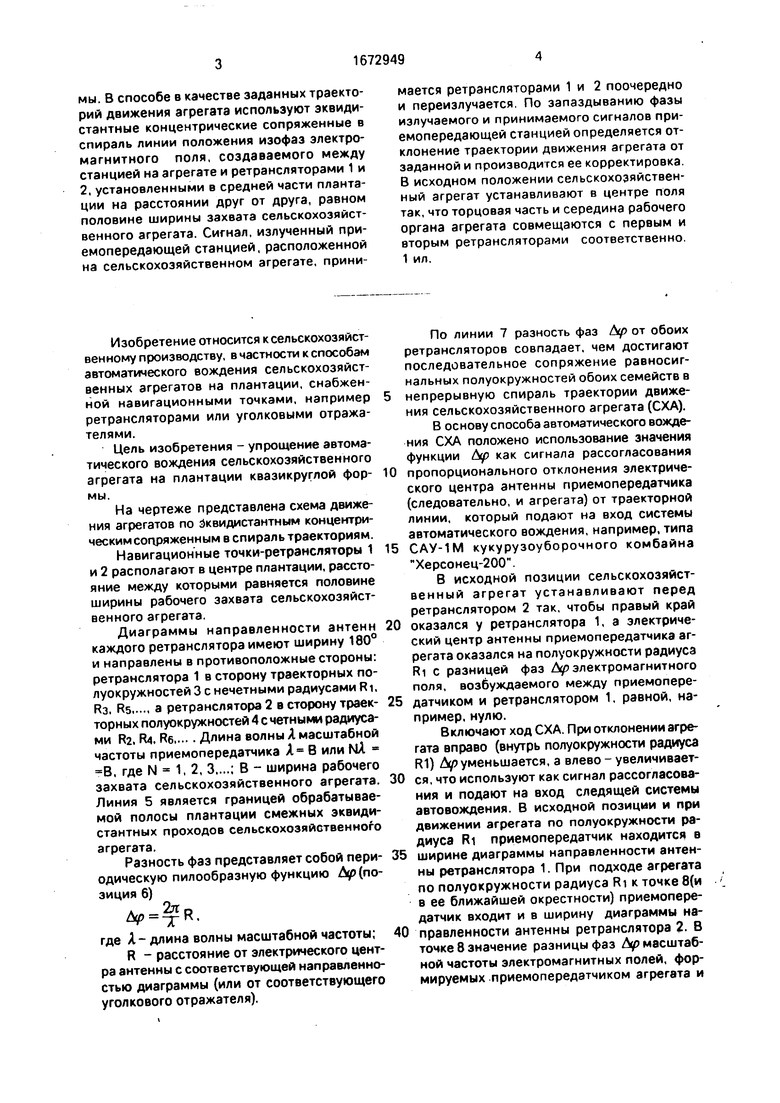

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Способ вождения мобильных сельскохозяйственных агрегатов | 1984 |
|
SU1274637A1 |
| Устройство для измерения дальности до управляемого машинно-тракторного агрегата | 1984 |
|
SU1279549A1 |
| Сигнализатор полосы формирования валков для порционных жаток-накопителей | 1990 |
|
SU1729312A1 |
| СИСТЕМА ОРИЕНТИРОВ ДЛЯ АВТОВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2021655C1 |
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| АВТОНОМНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1992 |
|
RU2110078C1 |
| Система автоматического вождения сельскохозяйственного агрегата по заданной траектории | 1991 |
|
SU1817958A1 |
Изобретение относится к сельскохозяйственному производству, в частности к способам автоматического вождения сельскохозяйственных агрегатов на плантациях, снабженных навигационными точками. Целью изобретения является упрощение автоматического вождения сельскохозяйственного агрегата на плантациях квазикруглой формы. В способе в качестве заданных траекторий движения агрегата используют эквидистантные концентрические сопряженные в спираль линии положения изофаз электромагнитного поля, создаваемого между станцией на агрегате и ретрансляторами 1 и 2, установленными в средней части плантации на расстоянии друг от друга, равном половине ширины захвата сельскохозяйственного агрегата. Сигнал, излученный приемопередающей станцией, расположенной на сельскохозяйственном агрегате, принимается ретрансляторами 1 и 2 поочередно и переизлучается. По запаздыванию фазы излучаемого и принимаемого сигналов приемопередающей станцией определяется отклонение траектории движения агрегата от заданной и производится ее корректировка. В исходном положении сельскохозяйственный агрегат устанавливают в центре поля так, что торцовая часть и середина рабочего органа агрегата совмещаются с первым и вторым ретрансляторами соответственно. 1 ил.
| Способ вождения мобильных сельскохозяйственных агрегатов | 1984 |
|
SU1274637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
