ю
vl
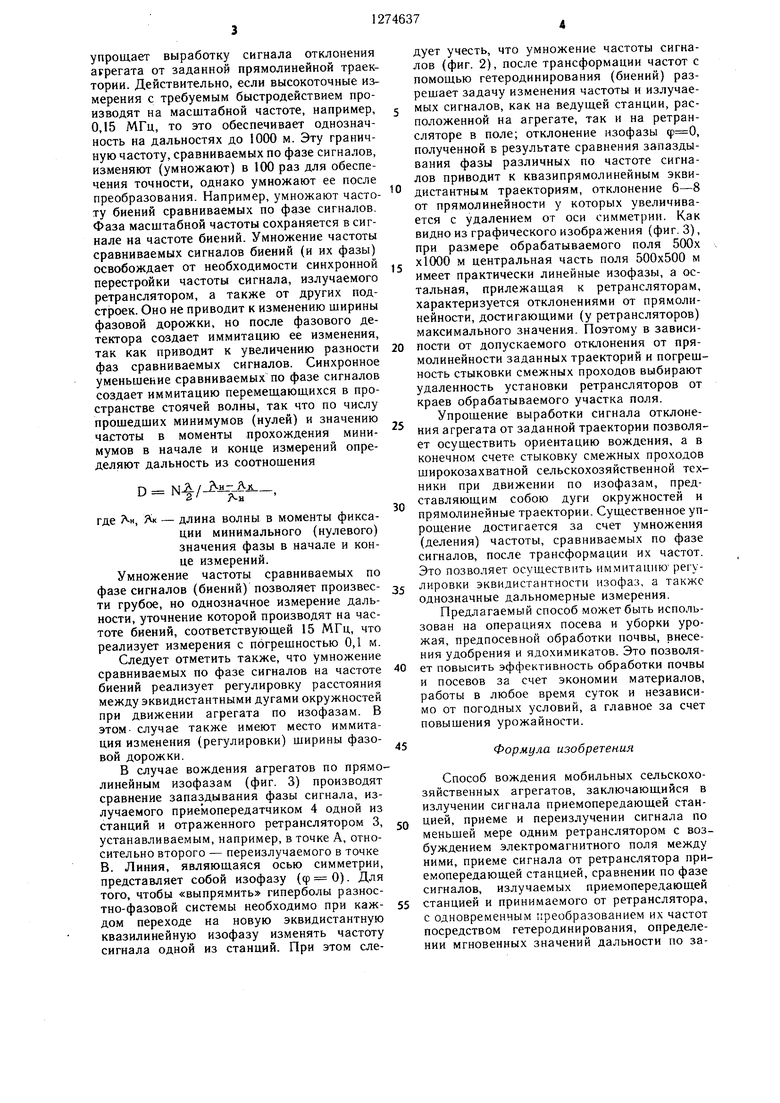
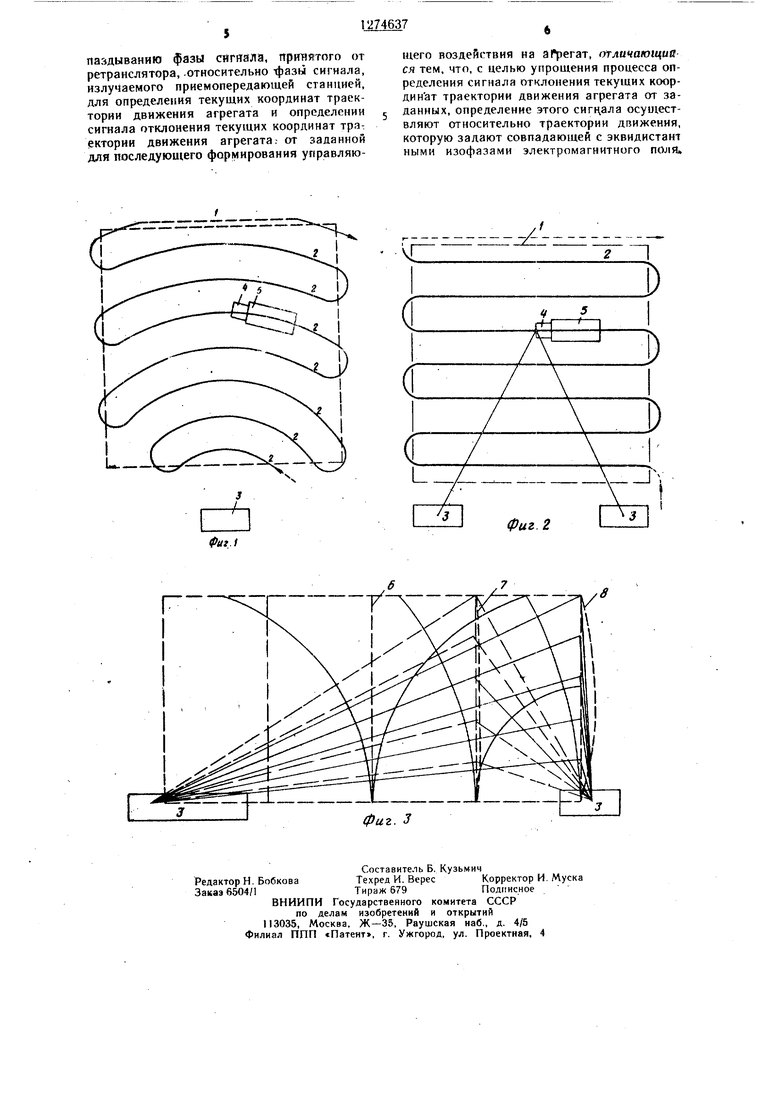
а со Изобретение относится к тракторному и сельскохозяйственному машиностроению, в частности к технологическим процессам обработки почвы и растений, выполняемым мобильными сельскохозяйственными машинами, и может быть использовано при выполнении работ по мелиорации, в строительстве, на угольных карьерах, таи где необходима ориентация для обеспечения движения агрегатов по заданным траекториям на открытой площадке, свободной для прохождения электромагнитных волн, снабженной навигационными точками, например ретрансляторами или уголковыми отражателями. Цель изобретения - упрощение процесса определения сигнала отклонения текущих координат траектории движения агрегата от заданных. На фиг. 1 представлена схема движения агрегатов челночным способам по дугам окружностей; на фиг. 2 - схема движения агрегатов по прямолинейным траекториям; на фнг. 3 - схема движения агрегатов по квазипрямолинейным эквидистантным траекториям (изофазам). Схема движения мобильных сельскохозяйственных машин (фиг. 1) содержит план обрабатываемого поля 1 с нанесенными на нем линиями 2 положения. Навигационная точка (ретранслятор) 3 располагается на краю поля, а ведушая станция, состоящая из приемопередатчика 4 и блока низкочастотного с индикатором 5 на тракторе. Для упрощения выработки сигнала отклонения агрегата от заданной траектории, обеспечения ориентации движения по эквидистантным траекториям, заданным в виде дуг окружностей, между приемопередатчиком 4 и ретранслятором 3 возбуждают электромагнитное поле, линии положения (изофазы) которого совпадают с заданными траекториями. Изофаза представляет собою геометрическое место точек, в которых запаздывание фазы принимаемого сигнала, прошедшего путь от приемопередатчика 4 до ретранслятора 3 и обратно относительно излучаемого, является постоянной величиной, В качестве заданных выбирают линии положения, характеризующиеся, например, значением фазы ф 0±:п2л, где п - целое число, номер линии положения. Учитывая, что изофазы, соответствующие отсчету ф const, повторяются через половину длины волны , последнюю выбирают равной заданной ширине захвата. Сигнал отклонения, пропорциональный разности текущего значения запаздывания фазы ф|, принимаемого сигнала по сравнению с заданным ф 0±п2л, является показателем отклонения от заданной (U АФ; ), визуально не наблюдаемой траектории, и используется для ориентации вождения агрегата. Таким образом, предлагаемый способ вождения с целью упрощения выработки сигнала отклонения агрегата от заданной траектории предусматривает следующую последовательность операции. Задают траектории, совпадающие с изофазами (дугами окружностей), центр которых располагают в навигационной точке Технологическую обработку поля производят по эквидистантным изофазам, дугам окружностей, запаздывание фазы в которых выбрано равным 3:n27r. Оно соответствует нулевым значениям сигнала на выходе блока низкочастотного (фазового детектора с индикатором 5). Заданное расстояние между дугами, равное половине длины волны () модулирующего (в данном примере) сигнала, определяется шириной захвата агрегата. Управляющее воздействие осуществляют по сигналу отклонения агрегата от заданной траектории. Дополнительно осуществляют регулировку расстояния между эквидистантными дугами окружностей (при движении агрегата по изофазам) путем умножения частоты сравниваемых по фазе сигналов. Сигналы на частоте биений, умножение которой не влияет на ширину фазовой дорожки, но иммитирует ее изменение вследствие изменения расстояний (эквидистантных) между дугами окружностей, в которых разность фаз, умноженных по частоте сигналов, приобретают значения, равные 0±п2п. Движение мобильных сельскохозяйственных агрегатов по прямолинейным траекториям (фиг. 2) предполагает наличие двух ретрансляторов 3, устанавливаемых на краю обрабатываемого поли. Между каждым из них и приемопередатчиком 4 возбуждают электромагнитное поле. Измерение запаздывания фазы сигналов, переотраженных ретрансляторами, относительно из лучаемых позволяет однозначно определять дальность до них, если выполняется условие 1 15 где f - масштабная частота, на которой производят измерения; с - скорость распространения электромагнитной волны; D- максимальная дальность между агрегатом и ретранслятором. Учитывая, что погрешность измерения фазы достигает примерно 0,01 полного фазового цикла при длине волны я 2000 м, погрешность измерения дальности составляет- 1,0 м. Так как в большинстве случаев допускаемая агротехническими требованиями погрешность отклонения агрегата составляет менее 0,1 м, его движения по прямолинейным траекториям умножают частоту сравниваемых по фазе сигналов после трансформации их частот с помощью гетеродинирования, биений. Это упрощает выработку сигнала отклонения агрегата от заданной прямолинейной траектории. Действительно, если высокоточные измерения с требуемым быстродействием пронзводят на масштабной частоте, например, 0,15 МГц, то это обеспечивает однозначность на дальностях до 1000 м. Эту граничную частоту, сравниваемых по фазе сигналов, изменяют (умножают) в 100 раз для обеспечения точности, однако умножают ее после преобразования. Например, умножают часто ту биений сравниваемых по фазе сигналов. Фаза масштабной частоты сохраняется в сигнале на частоте биений. Умножение частоты сравниваемых сигналов биений (и их фазы) освобождает от необходимости синхронной перестройки частоты сигнала, излучаемого ретранслятором, а также от других подстроек. Оно не приводит к изменению ширины фазовой дорожки, но после фазового детектора создает иммитацию ее изменения, так как приводит к увеличению разности фаз сравниваемых сигналов. Синхронное уменьшение сравниваемых по фазе сигналов создает иммитацию перемеш,аюш,ихся в пространстве стоячей волны, так что по числу прошедших минимумов (нулей) и значению частоты в моменты прохождения минимумов в начале и конце измерений определяют дальность из соотношения D , где АН, Як - длина волны в моменты фиксации минимального (нулевого) значения фазы в начале и конце измерений. Умножение частоты сравниваемых по фазе сигналов (биений) позволяет произвести грубое, но однозначное измерение дальности, уточнение которой производят на частоте биений, соответствующей 15 МГц, что реализует измерения с погрешностью 0,1 м. Следует отметить также, что умножение сравниваемых по фазе сигналов на частоте биений реализует регулировку расстояния между эквидистантными дугами окружностей при движении агрегата по изофазам. В этом- случае также имеют место иммитация изменения (регулировки) ширины фазовой дорожки. В случае вождения агрегатов по прямолинейным изофазам (фиг. 3) производят сравнение запаздывания фазы сигнала, излучаемого приемопередатчиком 4 одной из станций и отраженного ретранслятором 3, устанавливаемым, например, в точке А, относительно второго - переизлучаемого в точке Б. Линия, являющаяся осью симметрии, представляет собой изофазу (ф 0). Для того, чтобы «выпрямить гиперболы разностно-фазовой системы необходимо при каждом переходе на новую эквидистантную квазилинейную изофазу изменять частоту сигнала одной из станций. При этом следует учесть, что умножение частоты сигналов (фиг. 2), после трансформации частот с помощью гетеродинирования (биений) разрешает задачу изменения частоты и излучаемых сигналов, как на ведущей станции, расположенной на агрегате, так и на ретрансляторе в поле; отклонение изофазы , полученной в результате сравнения запаздывания фазы различных по частоте сигналов приводит к квазипрямолинейным эквидистантным траекториям, отклонение б-8 от прямолинейности у которых увеличивается с удалением от оси симметрии. Как видно из графического изображения (фиг. 3), при размере обрабатываемого поля 500х xlOOO м центральная часть поля 500x500 м имеет практически линейные изофазы, а остальная, прилежащая к ретрансляторам, характеризуется отклонениями от прямолинейности, достигающими (у ретрансляторов) максимального значения. Поэтому в зависипости от допускаемого отклонения от прямолинейности заданных траекторий и погрещность стыковки смежных проходов выбирают удаленность установки ретрансляторов от краев обрабатываемого участка поля. Упрощение выработки сигнала отклонения агрегата от заданной траектории позволяет осуществить ориентацию вождения, а в конечном счете стыковку смежных проходов широкозахватной сельскохозяйственной техники при движении по изофазам, представляющим собою дуги окружностей и прямолинейные траектории. Существенное упрощение достигается за счет умножения (деления) частоты, сравниваемых по фазе сигналов, после трансформации их частот. Это позволяет осуществить иммитацию регулировки эквидистантности изофаз, а также однозначные дальномерные измерения. Предлагаемый способ может быть использован на операциях посева и уборки урожая, предпосевной обработки почвы, внесения удобрения и ядохимикатов. Это позволяет повысить эффективность обработки почвы и посевов за счет экономии материалов, работы в любое время суток и независимо от погодных условий, а главное за счет повышения урожайности. Формула изобретения Способ вождения мобильных сельскохозяйственных агрегатов, заключающийся в излучении сигнала приемопередающей станцией, приеме и переизлучении сигнала по меньшей мере одним ретранслятором с возбуждением электромагнитного поля между ними, приеме сигнала от ретранслятора приемопередающей станцией, сравнении по фазе сигналов, излучаемых приемопередающей станцией и принимаемого от ретранслятора, с одновременным преобразованием их частот посредством гетеродинирования, определении мгновенных значений дальности по за
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения дальности до управляемого машинно-тракторного агрегата | 1984 |
|
SU1279549A1 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Способ автоматического вождения сельскохозяйственного агрегата | 1989 |
|
SU1672949A1 |
| Сигнализатор полосы формирования валков для порционных жаток-накопителей | 1990 |
|
SU1729312A1 |
| Способ определения дальности при автовождении машинно-тракторного агрегата | 1991 |
|
SU1793833A3 |
| АВТОНОМНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1992 |
|
RU2110078C1 |
| ДАЛЬНОМЕРНАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННЫМ ТРАЕКТОРИЯМ | 1990 |
|
RU2028005C1 |
| СИСТЕМА ОРИЕНТИРОВ ДЛЯ АВТОВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2021655C1 |
| Устройство для определения координат машинно-тракторного агрегата | 1990 |
|
SU1701137A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
Изобретение относится к тракторному и сельскохозяйственному машиностроению и может быть использовано при выполнении работ по мелиорации, в строительстве, на УГОЛЬНЫХ карьерах, где необходима ориен.тация для обеспечения движения агрегатов по заданным траекториям на открытой площадке, свободной для прохождений электромагнитных волн, снабженной навигационными точками. Целью изобретения является упрощение процесса определения сигнала отклонения текущих координат траектории движения агрегата от заданных. В способе в качестве заданных траекторий используются эквидистантные линии положения изофаз электромагнитного поля,создаваемого между станцией на агрегате и ретранслятором. Производится умножение частоты сравниваемых по фазе сигналов после трансформации их частот с помощью гетеродинироваиия. В качестве задаиных траек торий используются также прямолинейный (квазипрямолинейные инофазы разностнофазовой системы, в которой при переходе агрегата на каждую новую эквидистантную траекторию производят нзмеиение сл частоты (умножение частоты) сигналов воД ном из двух электромагнитных полей. 3 ил.
| СПОСОБ ФАЗОВОЙ ИНДИКАЦИИ В ГЕОДЕЗИЧЕСКИХ РАДИОДАЛЬНОМЕРАХ | 0 |
|
SU260207A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
