и устройством 44 управления. При включении стенда сигнал управления с выхода второго задающего блока 48 подается через гидрораспределитель 46 D гидромотор 45, который с1зязан с входным валом 43 РМ 1. С выходным звеном 9 РМ 1 жестко соединен шток 19 УН 10, Переключателем сигнал управлеИзобретение относится к испытательным устройствам, в частности к стендам для испытания рулевых меха-, низмов транспортных средств.
Цель изобретения - расширение функциональных возможностей стенда.
На фиг, 1 изображена принципиальная схема стенда на фиг. 2 - схема задающего устройства; на фиг. 3 - схема блока задания знака и величи- ны силы; на фиг. 4 - временная диа грамма работы блока задания знака и величины силы, на фиг. 5 - временная диаграмма работы устройства управления.
Испытываемый рулевой механизм 1 содержащий распределительное устройство 2 и гидроцилиндр 3, связан гидролиниями 4 и 5 с источником 6 пита- ния,, состояи(им из насоса 7 и предо- хранительного клапана 8. Выходное звно 9 рулевого механизма.1 соединено с устройством 10 нагружения, которое образовано дополнительным гидроцилин дром 11, рабочие полости которого соединены гидролиниямй с выходными каналами электрогидравлического усилителя 12. Входные каналы последнего соединены с напорной 13 и сливной I4 гидролиниями дополнительного источника 15 питания, состоящего из насоса 16 и предохранительного клапана 17, соединенных с гидробаком 18.
Электрогидравлический усилитель f .12 (электрогидравлический усилитель типа УЭГ-С),в котором перемещение золотника управляется входным электрическим сигналом, обеспечивает задание на штоке 19 гидропилиндра 11 усилия, пропорционального электрическому сигналу управления.
ния задается либо с выхода источника постоянного напряжения, что позволя- ет ..задавать постоянную нагрузку требуемого направления, либо генератора сигналов спениальной формы, что позволяет задавать нагрузку, изменяющуюся по определенному закону. 2 з.п, ф-лы, .5 ил.
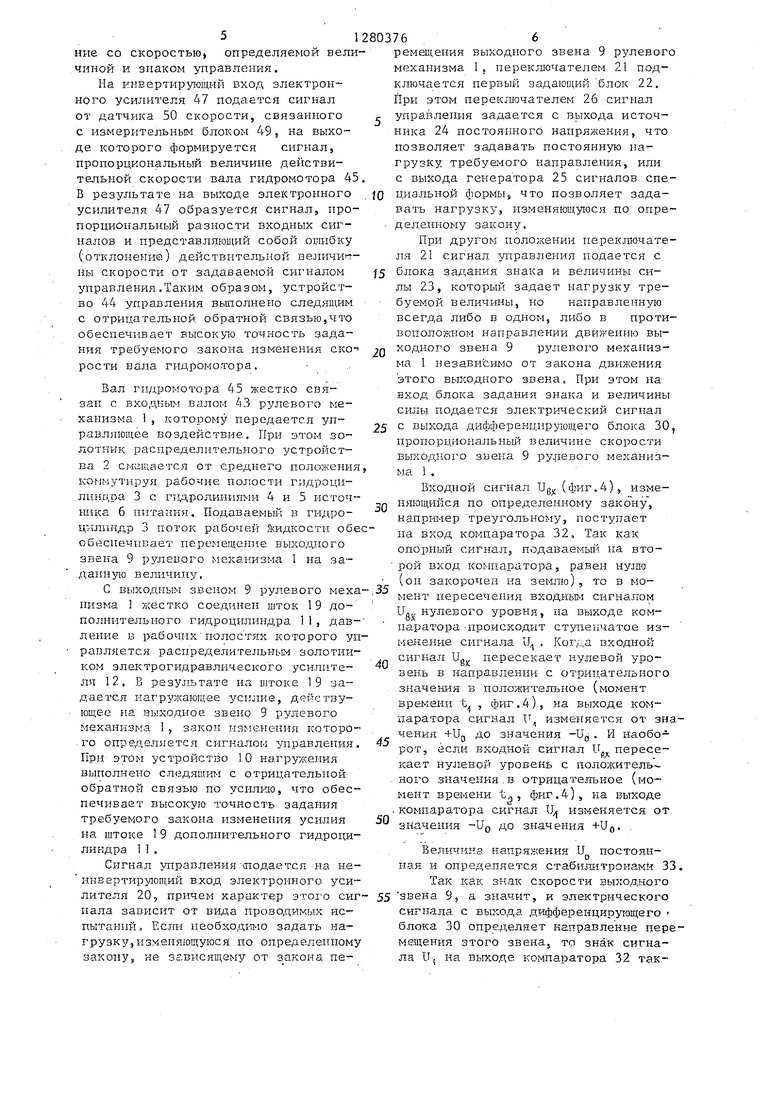
Электрическирг сигнал управления подается на неинвертирующий вход первого электронного усилителя 20 с выхода переключателя 21, один вход которого связан с первым задающим блоком 22, а второй - с выходом блока 23 задания знака и величины силы.
Первый задающий блок 22 (фиг.2) содержит источник 24 постоянного напряжения (регулируемый источник постоянного тока типа Б5-43) и генератор 25 сигналов специальной формы (типа генератор Гб-28), выходы которых связаны с переключателем 26. Генератор позволяет формировать периодические электрические сигналы с частотой в диапазоне от 0,001 -Гц до 1 МГц различной формы: гармонической, треугольной, прямоугольной, пилообразной и импульсной.
Блок задания знака и величины силы управляется сигналом, формируемым датчиком 2 7 перемещения, подвижный элемент которого жестко связан тягой 2В с выходным звеном 9 рулевого механизма 1. Выход датчика перемещения через первый измерительный блок 29 связан с дифференцирующим блоком 30.
Датчик 27 перемещения (емкостный преобразователь) и связанный с ним первый измерительный блок 29 позволяют получить на выходе измерительного устройства электрический сигнал пропорциональный величине смещения выходного звена рулевого механизма от нулевого положения.
Дифференцирующ,ий блок 30 обеспечивает получение на выходе сигнала, пропорционального скорости в.ыходно- го звена рулевот о механизма.
Блок задания знака и величины силы формирует электрический сигнал управления, знак которого определяется знаком скорости Выходного звена, а величина задается равной требуемому значению силы нагружения. Блок задания знака и величины силы может быть выполнен на базе операционных усилителей (фиг. З) и содержит последовательно соединенные детектор 3 пгресечения нулевого уровня, состоящий из компаратора 32, в цепи обратной связи которого установлены навстречу друг другу стабилитроны 33, инвертирующий усилитель 34, выполненный на основе операционного усилителя 35, переключатель 36 и усилитель 37 с регулируемым коэффициентом усиления. Усилитель 37 с регулируемым коэффициентом усиления выполнен на операци- онном усилителе 38, инвертирующий вход которого соединен со стоком полевого транзистора 39, затвором связанного с источником 40 постоянного напряжения. При регулировании напряжения на затворе полевого транзистора 39 изменяется его сопротивление, что приводит к изменению
отношения сопротивления обратной свя-30 ного устройства электрический сигзи и входного сопротивления и, следовательно, изменяется коэффициент усиления усилителя.
,На инвертирующий вход первого электронного усилителя 20 подается электрический сигнал с выхода второго измерительного блока 41, связанного с датчиком 42 силы, образуя отрицательную обратную связь .по усилию в устройстве нагружения. Электронный усилитель 20 (усилитель типа УМЭ-100) обеспечивает усиление по мощности разности двух входных сигналов до величины, необходимой для
управления электрогвдравлическим уси-45 ным усилителем 47 сигнал управления лителем.
Датчик 42 силы (силоизмеритель типа у) позволяет преобразовывать измеряемое усилие в деформацию чувствительного элемента, которая ре- 50 гистрируется с помощью измерительного блока 41 (тензометрический усилитель типа 8 АНЧ).
Входной вал 43 рулевого механизподается в цепь управления дополнительного электрогидравлического прег образователя 46, что приводит к сме- Г1ению .его распределительного зюлот- ника от среднего положения на величину, определяемую величиной и знаком сигнала управления. При этом рабочие кромки распределительного золотника образуют дроссельные щели.
ма 1 соединен с устройством 44 управ 55 через которые часть потока рабочей
ления, состоящим из гидромотора 45 (аксиально-порщневой гидромотор типа Г15-2)., рабочие полости которого соединены гидролиниями с выходными
5
0
5
каналами дополнительного электрогидравлического усилителя 46, входные каналы которого соединены с напорной 13 и сливной 14 гидролиниями дополнительного источника 15 питания.
Электрогидравлический усилитель 46 (усилитель типа УЭГ-С) задает валу гидромотора 45 вращение со скоростью, пропорциональной электрическому сигналу управления.
Электрический сигнал управления подается на инвертирующий вход второго электронного усилителя 47 (усилитель типа У1ЧЭ-100) с выхода второго- задающего блока 48, схема которого аналогична схеме первого задающего блока (фиг. 2).
На инвертирующий вход второго электронного усилителя 47 подается электрический сигнал с выхода третьего измерительного блока 49, связанного с датчиком 50 скорости, образуя отрицательную обратную связь по скорости в устройстве управления.
Датчик 50 скорости (и адукционный преобразователь) и связанный с ним третий измерительный блок 49 позволяют получить на выходе измеритель5
0
нал, пропорциональный величине скорости вала рулевого механизма.
Стенд работает следующим-образом.
Сигнал управления с выхода задающего блока 48 подается на неинвер- тирзпощий вход электронного усилителя 47. При этом в зависимости от вида проводимых испытаний (статические или динамические) сигнал управления подается с выхода источник а 24 постоянного напряжения или с выхода генератора 25 сигналов специальной формы, что задается переключателем 26. После усиления электронным усилителем 47 сигнал управления
подается в цепь управления дополнительного электрогидравлического прег- образователя 46, что приводит к сме- Г1ению .его распределительного зюлот- ника от среднего положения на величину, определяемую величиной и знаком сигнала управления. При этом рабочие кромки распределительного золотника образуют дроссельные щели.
жидкости от дополнительного источника 15 питания подается в рабочие полости гидромотора 45. В результате валу гидромотора 45 задается вращение со скоростью определяемой величиной и знаком управления.
На инвертирующий вход электронного усилителя 47 подается сигнал от датчика 50 скорости, связанного с измерителъньм блоком 49, на выходе которого формируется сигнал, пропорциональный величине действительной скорости вала гидромотора 45 В результате на выходе электронного усилителя 47 образуется сигнал, нро- порниональный разности входных сигналов и представля ощий собой оиибку (отклонение) действительной величи -г- ны скорости от задаваемой сигналом унравЛенин.Таким образом, устройство 44 управления вьшолнено следящим с отрицательной обратной связью,что обеспечивает высокую точность задания требуемого закона изменения скорости вала гидромотора.
Вал гидромотора 45 жестко связан с входным валом 43 рулевого механизма 15 которому передается управляющее воздействие. При этом золотник распределнтельного устройства 2 смещается от среднего положения, коммут11руя рабочие полости гядроцн- линдра 3 с г;едролиниями 4 и 5 источника 6 питания, Подаваемый в гидро- цилцндр 3 поток рабочей Жидкости обес- обеспечпвает перемещегше выходного звена 9 рулевого механизма 1 на за- .данную величину,
С выходным звеном 9 рулевого механизма I жестко соединен шток 19 дополнительного гидроцилиндра 11, дав- ление в рабочих нолостях которого управляется раснределительньЕх золотником электрогидравлического усилителя 12, В результате на итоке,19 задается загружающее усилие, Д(йству- ющее на выходное звено 9 рулевого механизма 1, закон изменения которого опре,г.1,еляется сигналом управления. При этом устройство 10 нагружения выполнено следящим с отрицательной обратной связью по усилию, что обеспечивает высокую точность задания требуемого закона изменения усилия на штоке 19 дополнительного гидроцилиндра 1 .
Сигнал управленияхподается на не- инвертирл1ощий вход электронного уси2Q ходного звена 9 рулевого механизма 1 независимо от закона движения этого выходного звена. При этом на вход блока задания знака и величины силы подается электрический сигнал
25 с выхода дифференцирующего блока 30, пропорциональный величине скорости выходного звена 9 рулевого механизма i .
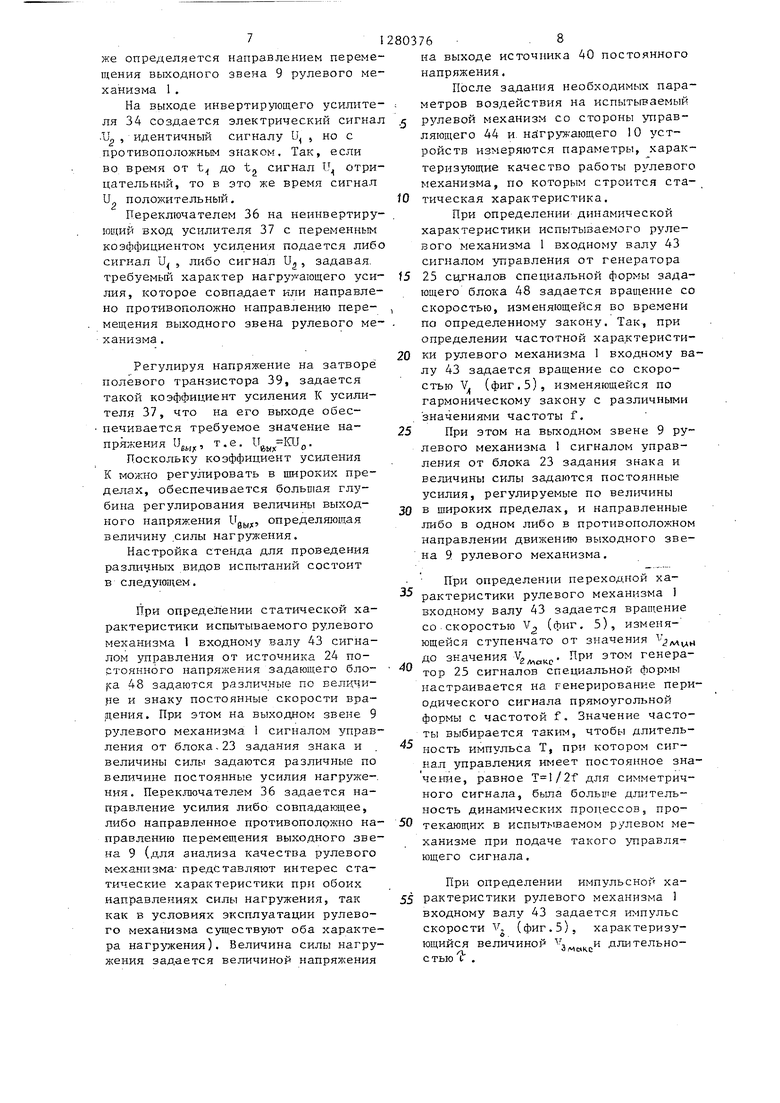
Входной сигнал Ug (.4), изменяющийся по определенному закону, Hanpi-H-iep треугольному, поступает на вход компаратора 32, Так как опорный сигнал, подаваемьй ка. второй вход компаратора, равен нутао (он закорочен на землю), то в момент пересечения входным сигналом ILjj нулевого уровня, на выходе компаратора -происходит ступенчатое из- медег ие сигнала U. сигнал и.
50
35
.i , Kor/i.a входной
, ,rii ..io..,i .о., пересекает нулевой уро- 40 ьх
вень в направлении с отрицательного
значения в положительное (момент BpeMeiiH t , фиг.4), на выходе компаратора сигнал 1 изменяется от значения +U(, до значения -U . И наоборот, если входной сигнал U пересекает нулевой ypoBBEib с положитель- ного значения.в отрицательное (момент Бремени tp, фиг.4), на выходе компаратора сигнал U изменяется от значения -U до значения +Uo. ,
Величина напрял ения 11 постоян50
ная и определяется стабиш тронамй 33.
Так как знак скорости выходного лителя 20, причем характер этого сиг- 55 звена 9, а значит, и электрического нала зависит от вида проводимых ис- сигнала с выхода дифференцир ующего пытаний. Если необходимо задать на- блока 30 определяет направление перегрузку, изменяющуюся по определенному мещения этого звена, то знак сигна- закоиу, не зависящему от закона пе- ла U, на выходе, компаратора 32 такремеп1;ения выходного звена 9 рулевого механизма 1, переключателем 21 подключается первый задающий блок 22, При этом переключателем 26 сигнал
. упраззления задается с выхода источника 24 ностоянногО напряжения, что позволяет задавать постояин ую нагрузку требуемого направления, или с выхода генератора 25 сигналов специальной формы, что позволяет задавать нагрузку, изменяющ уюся по опре- деленному закону.
При другом положении переключателя 21 сигнал управления подается с
5 блока задания знака и величины силы 23, который задает нагрузку требуемой величины, но направленную всегда либо в одном, либо в противоположном направлении движению выQ ходного звена 9 рулевого механизма 1 независимо от закона движения этого выходного звена. При этом на вход блока задания знака и величины силы подается электрический сигнал
5 с выхода дифференцирующего блока 30, пропорциональный величине скорости выходного звена 9 рулевого механизма i .
Входной сигнал Ug (.4), изменяющийся по определенному закону, Hanpi-H-iep треугольному, поступает на вход компаратора 32, Так как опорный сигнал, подаваемьй ка. второй вход компаратора, равен нутао (он закорочен на землю), то в момент пересечения входным сигналом ILjj нулевого уровня, на выходе компаратора -происходит ступенчатое из- медег ие сигнала U. сигнал и.
0
5
.i , Kor/i.a входной
, ,rii ..io..,i .о., пересекает нулевой уро- 0 ьх
вень в направлении с отрицательного
значения в положительное (момент BpeMeiiH t , фиг.4), на выходе компаратора сигнал 1 изменяется от значения +U(, до значения -U . И наоборот, если входной сигнал U пересекает нулевой ypoBBEib с положитель- ного значения.в отрицательное (момент Бремени tp, фиг.4), на выходе компаратора сигнал U изменяется от значения -U до значения +Uo. ,
Величина напрял ения 11 постоян0
ная и определяется стабиш тронамй 33.
/
же определяется направлением перемещения выходного звена 9 рулевого механизма 1 .
На выходе инвертирующего усилителя 34 создается электрический сигна .и , идентичный сигналу U, , но с противоположным знаком. Так, если во время от t до t сигнал U отрицательный, то в это же время сигнал и положительный.
Переключателем 36 на неинвертирующий вход усилителя 37 с переменным коэффициентом усиления подается либ сигнал l , либо сигнал U , задавая, требуемый характер нагруу ающего уси ЛИЯ, которое совпадает или направлено противоположно направлению перемещения выходного звена рулевого механизма .
Регз лируя напряжение на затворе полевого транзистора 39, задается такой коэффициент усиления К усилителя 37, что на его выходе обеспечивается требуемое значение напряжения Uj,, т.е. .
Поскольку коэффициент усиления К можно регулировать в широких пределах, обеспечивается большая глубина регулирования величины выходного напряжения Ug|,j(, определяющая величину .силы нагружения.
Настройка стенда для проведения разли ных видов испытаний состоит в следующем.
При определении статической характеристики испытываемого рулевого механизма 1 входному валу 43 сигналом управления от источника 24 по- ртоянного напряжения задающего бло- 48 задаются различные по велцчи- fie и знаку постоянные скорости вра- (Цения. При этом на выходном звене 9 рулевого механизма 1 сигналом управления от блока - 23 задания знака и величины силы задаются различные по величине постоянные усилия нагруже-. Нин. Переключателем 36 задается направление усилия либо совпадающее, либо направленное противоположно направлению перемещения выходного звена 9 (для анализа качества рулевого механизма представляют интерес статические характеристики при обоих направлениях силы нагружения, так как в условиях эксплуатации рулевого механизма существуют оба характера нагрузкения). Величина силы нагружения задается величиной напряжения
80376 -8
на выходе источника 40 постоянного напряжения.
После задания необходимых пара; метров воздействия на испытываемый
.5 рулевой механизм со стороны управляющего 44 и. нйгруя ающего 10 устройств измеряются параметры, характеризующие качество работы рулевого механизма, по которым строится стаJO тическая характеристика.
При определении динамической характеристики испытываемого рулевого механизма 1 входному валу 43 сигналом управления от генератора
15 25 сщ налов специальной формы задающего блока 48 задается вращение со скоростью, изменяющейся во времени по определенному закону. Так, при определении частотной характеристи20 ки рулевого механизма 1 входному валу 43 задается вращение со скоростью у (фиг.5), изменяющейся по гармоническому закону с различными значениями частоты f.
25 При этом на выходном звене 9 рулевого механизма 1 сигналом управления от блока 23 задания знака и величины силы задаются постоянные усилия, регулируемые по величины
30 в щироких пределах, и направленные либо в одном либо в противоположном направлении движению выходного звена 9 рулевого механизма.
При определении переходной ха- рактеристики рулевого механизма 1 входному валу 43 задается вращение со скоростью V (фиг. 5), изменяющейся ступенчато от значения до значения - При этом генератор 25 сигналов специальной формы настраивается на генерирование периодического сигнала прямоугол1-.ной формы с частотой f, Значение частоты выбирается таким, чтобы длитель- ность импульса Т, при котором сигнал управления имеет постоянное зна- черше, равное для симметричного сигнала, была больше дл1 тель- ность динамических процессов, про- 50 текающих в испытываемом рулевом механизме при подаче такого управляющего сигнала.
40
При определении импульсной ха- рактеристики рулевого механизма 1 входному валу 43 задается импульс скорости V, (фиг.5), характеризующийся величиной Ч и длительно омс КС
СТЬЮ t .
При этом устройство 10 нагруже- ния настраивается также на форми- . рование постоянного нагружающего усилия, как и в предыдущих случаях.
При определении динамической жесткости испытьшаемого рулевого механизма 1 входному валу 43 не задается управляющего воздействия (он неподвижен). При этом переключателями 21 и 26 в цепь управления электрогидравлическим усилителем 12 подключается генератор 25 сигналов специальной формы задающего блока 22, который позволяет задавать нагрузку на выходном звене 9, изменяющуюся по гармоническому закону с различными значениями частоты и амплитуды.
Определение ряда параметров испытываемого рулевого механизма может вьтолняться при задании медленно меняющегося сигнала, управления (например, при определении сил трения, зоны нечувствительности и др,) При этом генератором 25 сигналов специальной формы задающего блока 48 входному валу 43 рулевого механизма I задается вращение со скоростью V , изменяющейся по треугольному закону с малой частотой f (фиг,5),
Формула изобретения
i, Стенд для испытания рулевых механизмов транспортных средств, содержащий источник питания, подключенный, к испытываемому рулевому меха№1зму, сообщаемому с гидробаком и гидро дилиндром нагружения, механически связанным своим штоком с штоком дополнительного гидроцилиндра, гидравлически соединенного через электрогидравлический усилитель с дополнительным источником питания и гидробаком, гидромотор привода рулевого механизма, механически связан- нь1й с рулевым валом испытываемого рулевого механизма и гидравлически соединенный через дополнительный
электрогрвдравлический усилитель с доI . .
28037610
полнительным источником питания и гидробаком, датчик скорости вращения рулевого вала, механически связанный с рулевым валом, датчик пере5 мещения гидроцилиндра нагружения и датчик усилия, закрепленный на штоке гидроцилиндра нагружения, электрически соединенные с устройствами управления и нагружения, о т л и 0 чающийся тем, что, с целью расширения функциональных возможностей стенда, устройство нагружения выполнено в .виде первого измеритель- ного блока, вход которого соединен
15 с датчиком перемещения, а выход через дифференцирующий блок и блок задания знака и величины силы - с одним входом переклочателя, другой вход которого соединен с первым за20 дающим блоком, а выход - с одним входом усилителя, другой вход которого через второй измерительный блок соединен с датчиком усилия, выход усилителя соединен с входом электрогид25 равлического усилителя, устройство управления вьшолнено в виде дополнительного усилителя, соединенного своими входами с вторым задающим блоком и через третий измерительный блок с
30 датчиком скорости, а своим выходом - с входом дополнительного электрогидравлического усилителя.
2,Стенд поп, , отличащийся тем, что каждый задаюий блок выполнен в виде источника остоянного напряжения и генератора сигналов, связанных с переключателем, выход которого является входом задающего блока,
3,Стенд по пп, 1 и 2, отличающийся тем, что блок задания знака и величины силы выполнен
в .виде соединенных последовательно детектора пересечения нулевого уровня, инвертирующего усилителя, переключателя и усилителя с регулируемым коэффициентом усиления, цепь управления которого связана с источником постоянного напряжения.
2Ц
25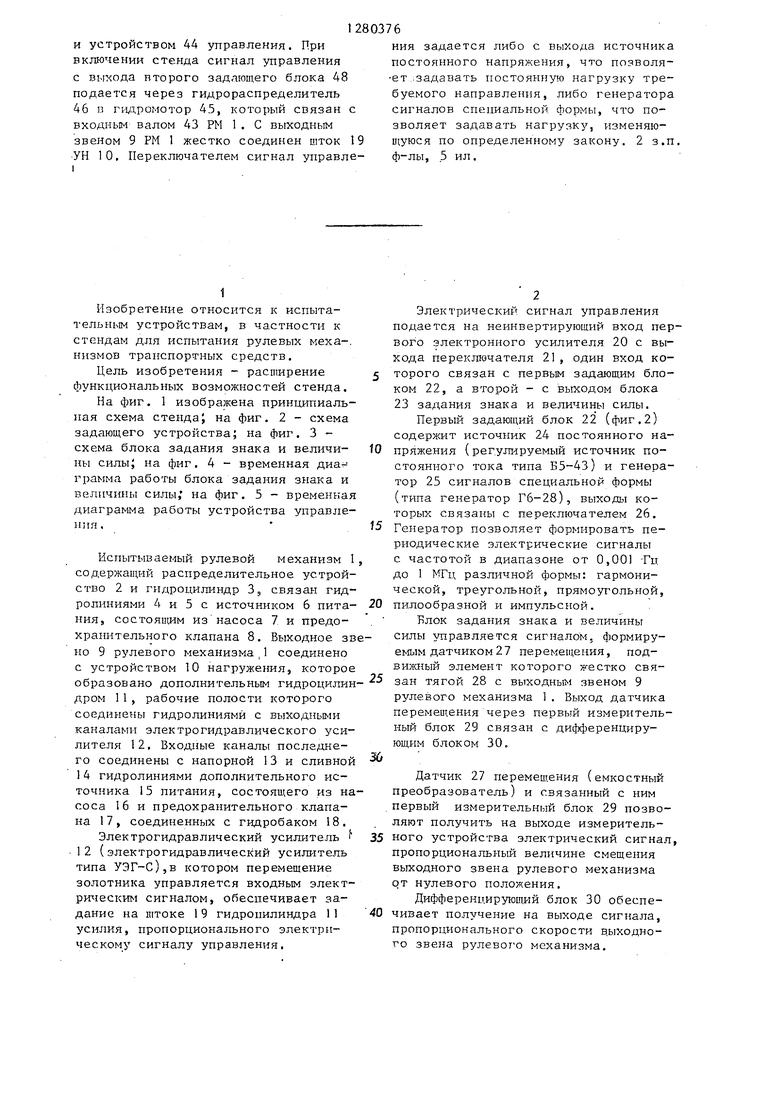


| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2008 |
|
RU2378539C1 |
| ГИДРАВЛИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1990 |
|
RU2005924C1 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| Стенд для испытаний винтовых преобразователей | 1980 |
|
SU985485A1 |
| Электрогидравлическая система совмещенного управления | 1988 |
|
SU1548363A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2013 |
|
RU2529965C1 |
| Стенд для испытаний гидрорулей транспортных средств | 1985 |
|
SU1257432A1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| Ресурсный стенд для испытаний гидрорулей | 1986 |
|
SU1372214A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ ВИБРОСТЕНДА | 2017 |
|
RU2671928C1 |


Изобретение относится к стендам для испытания рулевых механизмов транспортных средств. Цель изобретения - расширение функциональных возможностей за счет расширения диапазона и характера создаваемых стендом управляющих и нагружающих воздействий. Испытываемый рулевой механизм (РМ) 1 связан с источником 6 питания, устройством 10 нагружения (У Г), дополнительным источником 15 питания -гг SS X -12 со О)
26
оФиг.2
Фиг.З
Щых
gx
tj
g feoc.2
Ll
t2
UQ
-.
%/x.f
г
ФшгМ
Фмг.5
ВИИИШ 1 Заказ 7050/42 Тир аж 778Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
| Исследование и повышение эффективности тракторных объемных гидроприводов агрегатируемого оборудования и рулевых механизмов | |||
| Труды/ НАТИ | |||
| - М., 1975, вып | |||
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
