Известные устройства для интегрирования параметров медленно протекающих процессов обладают большой нестабильностью во времени, недостаточной точностью и сложны по конструкции.
Предлагаемое устройство выполнено в виде двух двигателей (например, часовых механизмов), прирост скорости вращения одного из которых пропорционален интегрируемой величине, а скорость другого - постоянна, и результат интегрирования получается в виде разности угловых перемещений валов двигателей.
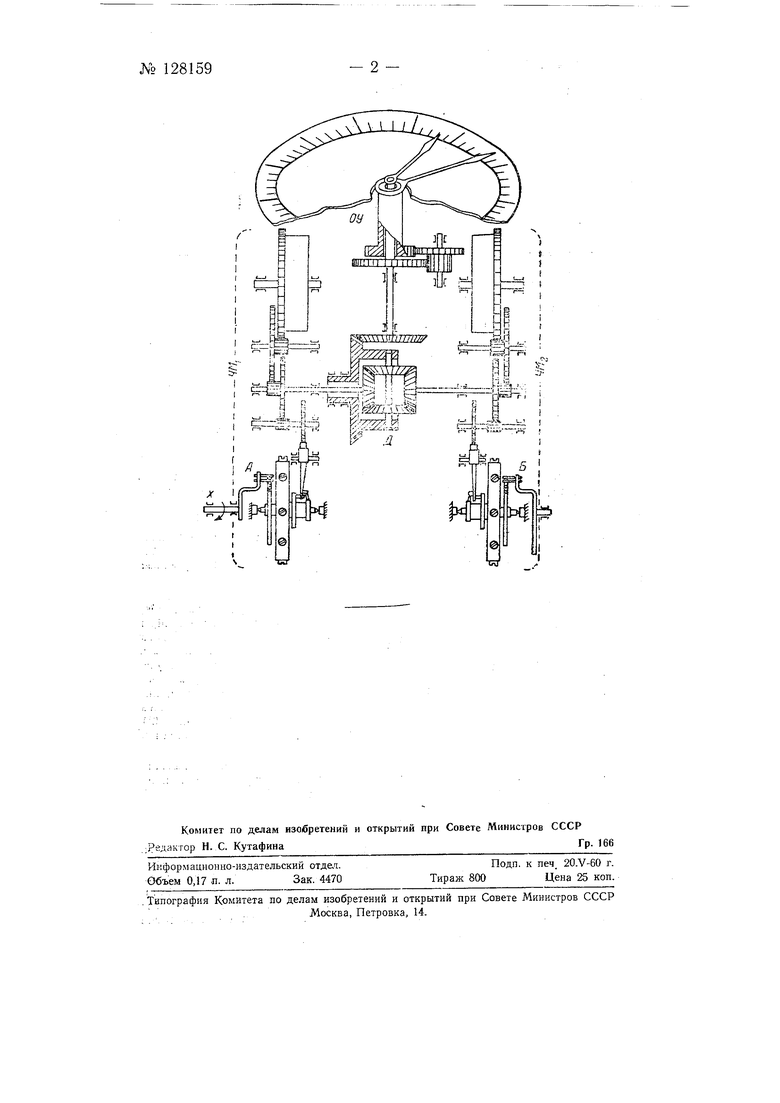
На чертеже дана кинематическая схема у стройства.
Интегратор состоит из двух часовых маятниковых механизмов ЧМ и 4Mz, у маятника одного из них длина пружины остается постоянной, а у другого изменяется пропорционально интегрируемой величине. Таким образом, разность хода этих часовых механизмов, которая может быть получена с помощью механического дифференциала Д и отсчетного устройства ОУ, будет являться интегралом во времени от интегрируемой величины X. Для изменения рабочей длины пружины используется подвижная вилка А, выполняющая роль регулятора хода обычных часов. Таким образом, интегрируемая величина задается углом поворота (до 120°) вилки А регулятора. Для установки нуля интег ратора служит вилка Б второго часового механизма.
Важным преимуществом интеграторов этого типа являются высокая точность интегрирования во времени, широкий частотный диапазон, простота устройства, малые габариты и вес.
Предмет изобретения
Интегрирующее уст ройство, отличающееся тем, что, с целью получения большого времени и широкого частотного диапазона интегрирования, оно выполнено в виде двух двигателей (наприЙГер, часовых,механизмов), прирост скорости вращения одного из которых пропорционален интегрируемой величине, а скорость другого - постоянна, и результат интегрирования получается в виде разности угловых перемещений валов двигателей.
|;ЯЩ:(1
S М
.- .1ГЛ-1
.:. Л
ТйГ