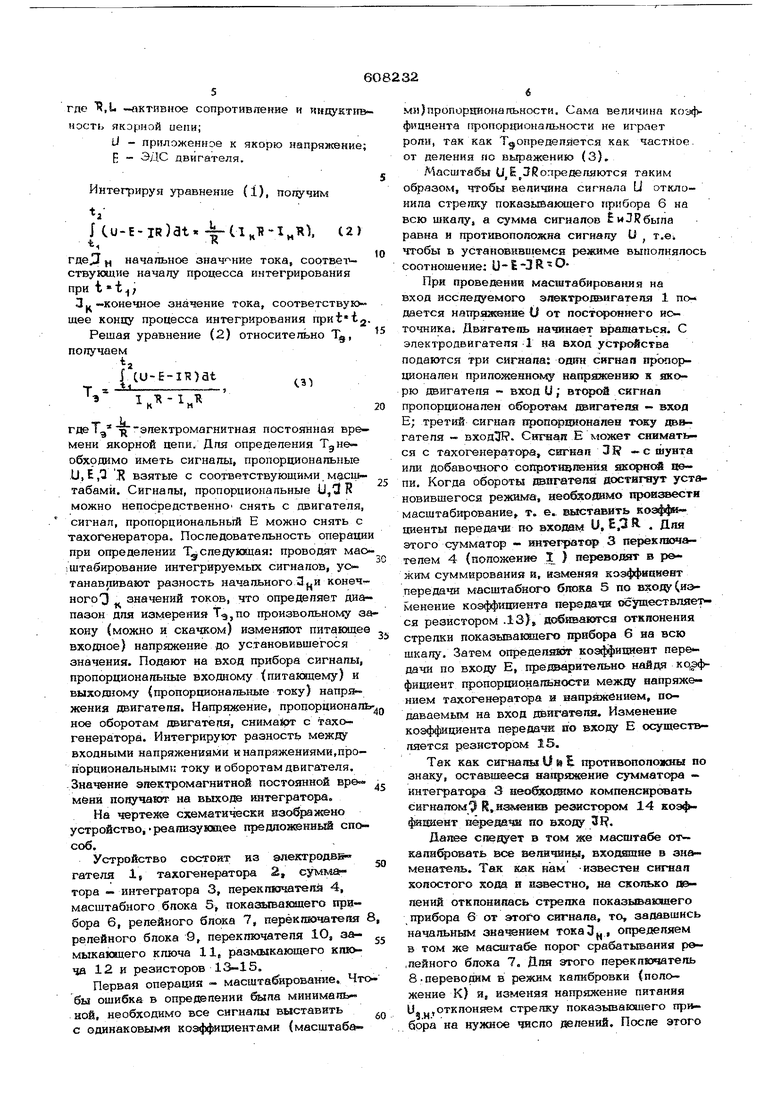
(54) СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ ЯКОРНОЙ ЦЕПИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКАо Есгги режим прерьшистых токов составпяет поповину всего изменения тока, изморенная эпектромагнитная постоянная времени умень шается в два раза по сравнению-с истинной Имеется вероятность создания аварийных режимов: а)двигатешз при .мапом статическом моменте йа счет остаточного магнитного тока может пойти в разнос; б)может быть испорчен коппектор и могут подгореть щетки, так кйк для определения Т ток обычно изменяют от нуля до номинального. Способы, основанные на анапизе осцип- пограмм на вращающейся машине, устраняют все принакпиапыные недостатки, присущие способам, основанным иа анализе ос сиппо грамм на неподвияишй машине. По этим способам определяют характер ные точки на осциллограмме тока. Наэример, разбивают ось времени на равные ин тервапы, дииной Д t и находят- гаобые три .рядом стоящие ординаты t, Ij, I Затем определяют оЕношение токов 3/1 и путем соответствующих расчетов опред© ляют Tg. Однако процесс опрейепения Т, связан-. ный с необходамостью снятия осаилпограмм нахождвнием на этих осцйппограммах характерных TOieK 0 проведением расчетов, дпитепен. Точность огфеделения Тдневысокая, так как нспояьауют топько несколько характерных точек нз осдашпограмм, что приводит к потере информации, поскольку Т определяется всей осаилпограммой тока. Кроме того, опредепение паранвтров ура нения (электромагнитной постоянной) по его решению (осщшпограмме тока) относит ся к слабо корректным задачам; мапым ошибкам в опрешгаешш характерных соответствуют бопьшне ошибки в оггредепенй постоянных времени; При проведении расчетов необходимо лользоваться справочными кривыми или стр ить графики, что неудобно. Автоматиаацня расчету затрудкителыш, так как сложно рпредеаять характерные точки а вводать справочнь материал. Невоаможно опредепе ние щюизвоньном напряжении сигнава подаваемого) на якорь двигатапя & также опреде нне отдельных участках кривой разгона, т. е. невозможно опреиепнть Т flfra иестайрйонарных систем.. При питании дв гатепя от тнрксторного выпрямителя его С1юяует paccMatpJJBaTb, как нестаанонарнов звено. Известен также способ опреде пения постоянной времени Тд якорной оепв эяектродвигателя постоянного тсжа, вкягочакжаий измер ния напряжения, тока якоря и скорости вращения эпектродвигателя, масштабирование измеренных сигналов и вычисление искомой вегшчины з. Такой способ позволяет по осциллограмме тока 3( i ) и скорости i(t)oT времени, снятой при подаче скачка напряжения преобразоватепя на вращающийся двигатепь без применения номограмм, выполняя пишь расчеты по простым формулам, определить постоянную Т-. Этот способ является наиболее близким к предложенному по технической сущности. По сравнению со способом способ характеризуется меньшей ошибкой, так как электромагнитная постоянная времени определяется всей кривой переходного процесса. Недостатками этого способа являются: дпитепьность времени определения , связанная с обработкой осциппог рамм; сложность применения автоматизации расчетов, так как необходимо определять производную тока по времени; невозможно определение Т на участке кривой разгона, так как принято, что процессы, протекающие в двигателе, описываются гшне15ными дифференциальными уравнениями, т. е. исключается режим прерывистых токов и изменение индуктивного сопротивления двигателя от тока двигателя. Одйако способ обладает недостаточной точностью особенно в. режиме прерывистых токов, так как не учитывается нелинейное иаменение индуктивных сопротивлений от тока двигателя и на конечном результате существенно сказьгвается форма входного сигнала. Целью изобретения является повышение точности определения электромагнитной постоянной времени Т якорной цепи электродвигателя. Это достигается тем, что .по предложо способу задают начальное 3м к6нечное значения тока якоря, формируют сигнап, равный разности напряжения якоря и снгнапоБ, пропорциональных току якоря и скорости электродвигателя, интегрируют эту разность, измеряют напряжение ДУ, пропорциональное интегралу разности замере ных сигналов, а искомую величину посто«п«- ной времени находят по формуле т KAU VVR гда R - активное сопротивление якорной цесш К - масштабный коэффициент. Переходные процессы в двигателе описываюггсз следуняыим уравнением и 1Rгде T,L -активное сопротивление и ность якорной цепи; U - приложенное к якорю напряжение : - ЭДС двигателя. Интегрируя уравнение (1), попучим Ku-E-IR)at« -|-(1„1 -1„КХ (2) гдеД начальное знач ние тока, сортвет ствующие началу процесса интегрирования при t t ; 31 -конечное значение тока, соответствухо щее концу процесса интегрирования npHtt Решая уравнение (2) относительно Т, получаем I Cu-E-n)at IKR- H гдеТд эпектромагнитная постоянная вре мени якорной цепи. Дпя определения ТдНеобхрдимо иметь сигналы, пропорциональные .U, Е ,3 J взятые с соответствующими масштабами. Сигнапы, пропорциональные U,3 J можно непосредственно снять с двигателя сигнал, пропорциональный Е можно снять с тахогенератора. Последовательность операц при определении ТдСледующая: проводят ма штабирование интегрируемых сигналов, устанавливают разность начального Л конеч ногоЭ значений токов, что определяет диа пазон для измерения произвольному з кону (можно и скачком) изменяют питакяде входное) напряжение до установившегося значения. Подают на вход прибора сигналы, пропорциональные входному питакнцему) и выходному (пропорциональные току) напряжения двигателя. Напр51жение, пропорционал ное оборотам даигате ш, снима рт с тахо генератора. Интегрируют разность между входными напряжениями и напряжениями,пропорциональными току и оборотам двигателя, Значение электромагнитной постоянной вре« MfeHH попучают на выходе интегратора. На чертеже схематически изображено устройство, реализующее предпоженньй способ. Устройство состоит КЗ ©лектродвйгателя 1, тахогенератора 2, сумкштора - интегратора 3, перекпючатвгея 4, масштабного бпока 5, показывакйцего прибора 6, релейного бпока 7, нерёкшочатейя релейного блока 9, перекшочатепя 10, замыкающего ключа 11, размыкающего ключа 12 и резисторов 13-15, Первая операция - масштабирование. Чт бы ошибка в определении была минимапь кой. необходимо все сигналы выставить с одинаковыми коэффициентами {масштабаМ 1)пропорцнонага ности. Сама величина коэффициента тропор{О1онага ности не играет ропн, так как Т определяется как частное. от деления но выражению (3). Масштабы U,S ЗRoг5peйeляютcя таким образом, чтобы вепичина сигнала U отклонила стрелку показыбакяцего гфнбора 6 на всю шкапу, а сумма сигналов иЛRбылa равна и противопопожна сигнапу U т.е чтобы в установивиюмся режиме выполнялось соотношение; При проведении масштабирования на вход исследуемого Э11ектро|юигатеия 1 по- дается наттряжэние О от постс юннего источника. Двигатель начинает вращаться. С электродвигатепя 1 на вход устройства подаются три сигнала: oamt сигнап пропорционален приложенному напряж&нвю к якорю двигателя - входи; второй сигнал пропорционален оборотам двигатеяя - вход Е; третий сигиап пропордионанен току дв гателя - входда. Сигнал Е может сниматься с тахогенератора, сшгкап 3R -с шунта или добавочного сойротидлениа saKOpHofi цепи. Когда обороты ввэгатэяя достигнут установившегося режима, иеобяоявмо произвести масштабирование т. в,, щлставить коэф4 5- циенты передает по входам U, Е,3 К. . Дпя этого сумматор - йнте1 ратор 3 переключателем 4 (положение 1 ) переводит в режим суммирования и, изменяя козффицкевт передачи масштабного бпюка 5 по входу (изменение коэффициента передачи осуществляется резистором .13), дс шакугся отклонения стрелки показьшакйнего прибора 6 на всю шкапу. Затем опредепявяг коэффициент пере дачи по входу Е, предааритепьно найдя ко,зффициент пропоргшонагаьйоста между напряжением тахогенератора и напряжением, подаваемым на вход ДБНгатвпя. Изменение коэффициента передачЕ но входу Е осуществляется резистором 15. Так как сигналы U и Е противопопожны по знаку, осташшееса яапрянсение сутчсматора интегратора 3 нео ощсмо компенснровать сигналом R.aastseHEB ре0ист«фом 14 коэф4й1щент иерейдчн ио входу 31. ДагЕее стадует в том же масштабе от- капв овать все величины, вход5Ш1яе в знв- менатепь. Так как нам -известен ситная холостого хода и известно, на скопько пэ- гюний отклонинась стрепка показывающего прибора 6 от этого сигнала, то, задавшись начальным значением токаЗ,, определяем в том же масштабе порог срабатывания рв,лейного блока 7, Дяя этого переключа те пь 8-переводам в режим калибровки (положение К) я, изменяя напряжение питания и. и,отклоняем стрелку показывающего прибора на нужное чяспо йэпений. После этого прибор по каналу и. откапибропаи и пере кпкучатель 8 переводится в режим работы (попожение Р). Лнапогично производят кяггабровку порога срабатывания реппйного бло ка 9 по каналу и, j (переютючатель 10 в по пожении К), задаются конечным опа-юпием тока 3 ц;изменя от напряжением питания U стрелка показьгоакхцего прибора отклоняется на нужное количество делений. Вторая операция - измерение. Переключате ли 8 и 1.0 переводят в положение работа (положение Г-), а переключатель 4 в положение Ц .Отключают двигатель 1 от нбьпряжения до полной его остановки. Затем по произвольному закону (можно и скачком) изменяют питакяцее напряжение до установившегося значения. Для обеспечения минимальной ошибки желательно питающее напряжение изменять доU,при котором прои ходит калибровка. При подаче напряжения на йвигатепь появляется динамический ток (сигнал JR)|j начинают расти обороты (появляется сигнал С). РазностьcигнaпoвU-E-ЗRинтeгpиpyeтся а течение времени Д - Время t.( соответствует началу рабочего участка в определении Т . Начало рабочего участка определяется величиной Л) ч(альный ток при огфеделении Т), Время fe соответствует концу рабочего участка. Конец рабочего участка определяется величино конечный ток .фи определении Т)Таким образом, при достижении током дай- гателя значения Л ц интегратор включается, а при достижении значения Dj выключается. При такой работе схемы время интегрирова- ния &i составляет произвольную величину Начало интегрирования определяется появ пением сигнала на выходе репейного блока 7, в качестве которого может быть иопользован усипигепь с попо)сительной обрат ной связью. Репейный блок 7 имеет два 3x. samкtmw& блок и ЛR-вход, определяемьй текущи л значением тока. Когда напряжение31 достигает веяичиныид.на выходе релейного блока 7 появляется напряже ние и срабатывает замыкакяНий ключ 11. Интегратор - сумматор 3 начинает процесс интегрирования функции . Конец интегрирования определяется появлением сигнала на выходе релейного бпока Б, в качестве которого может быть пользован усияитепъ с положительной обратной связью. Релейный блок 9 имеет два входаги, задающий вход и вход R. Когд напряжение 3R достигнет величины , на выходе репейного блока 9 по$шп5 ется напряжение и срабатывает размыкаквдий ключ 12. Срабатывая, размыкакяций ключ 12, отключает интегратор - сумматор 3 от масш табного блока 5, и процесс интегрирования заканч;:вается. Если выполнить операцию долення показания показывающего прибора 5 1ш диапазон изменения Ш1номического тока пт Л до 3 р, г. е, выполнить деление согласно вьфажснию (3), получим величину Т. Тпким образом, с помощью предложенного способа можно определять электромагнитные постоянные времени на вращающемся двигателе. Это значительно сокращает время наладки промьпнленных систем регулирования и позволяет на этих системах добиться оптимального режима работы за более короткий срок эксплуатации. Кроме того, по срав- . нению с известным,предложенный способ обладает следукщими преимуществами: повыщается точность определения посто5шных времени за счет учета изменения индуктивного сопротивления якорной цепи при включении тока возбуждения;возможно определение посто$шных времени нестационарных звейьев; искшочается возможность создания аварийных режимов. Формула изобретения Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока, включающий измерения напряжения, тока якоря и скррости электродвигателя, масштабирование измеренных сигналов и вычисление искомой величины, от ли чающийся тем, что, с целью повьшдения точности, задают начальное 3 и конечное Л значения тока якоря, формируют сигнал, равный разности напряжения якоря и сигналов, пропорциональных току якоря и скорости электродвигателя, интегрируют эту разность, измеряют напряжение Д U пропорциональное интегралу разности замеренных сигнапов, а искомую вегшчину постояной времени находят по формуле э 11 -IJR .1 -активное сопротивление якорной цепиJ К - масштабный коэффициент. Источники информации, принятые во вни- ание при экспертизе: 1. Авторское свидетегаьство СССР 5 166541, кл. q 05 В 23/02, 1962. 2.Ямпольский Д. С, и др. Определение инамических параметров электропривода остоянного тока, М.,Энергия 1971, . 14-20. 3,Еланчик Б. И. Экспериментальное пределение динамических параметров приода постоянного тока Электротехничг г.ая промышленность, вып. 7, серия Эгюктропривод, 1971, с. 21-23.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1979 |
|
SU911476A2 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Устройство для измерения статической составляющей тока якоря двигателя постоянного тока | 1982 |
|
SU1030749A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1975 |
|
SU661513A1 |
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |

