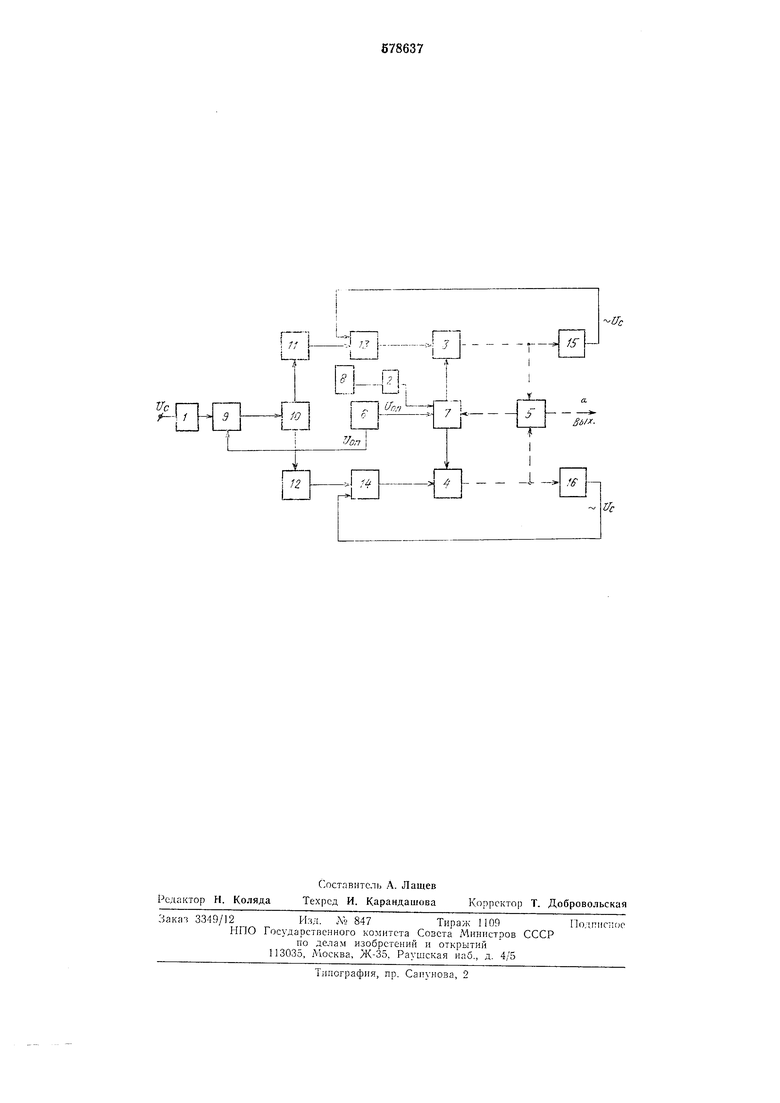
10, магнитные усилители 11 и 12, усилители 13 и 14, тахогенераторы 15 и 16.
Электромеханический интегратор работает в двух режимах -автоподстройки и интегрирования. В режиме автоподстройки (ключи 1 и 2 разомкнуты) выходные валы обоих дви1-ателей 3 и 4 будут вращаться в разные стороны, в ИхТ.еальном случае, с одинаковой скоростью и выходной вал дифференциала 5 будет неподвижен. Однако в реальных условиях статические характеристики двигателей 3 и 4 могут быть не адекватны, а поэтому будет иметь место разность угловых скоростей вращения валов двигателей 3 и 4 при одиой и той же величине опорного напряжения источника 6, т. с. будет иметь место наличие «самохода выходной оси дифференциала 5. Устранение этого «самохода производится блоком 7 автоподстройки иутем изменения величины опорного напряжения с помощью потенциометра, включенного в цепь одних из обмоток управления двигателей 3 и 4. Движок потенциометра будет перемещаться до тех пор, пока разность скоростей выходных валов двигателей 3 и 4 не станет равной нулю, а выходная ось дифференциала 5 перестанет вращаться.
В иитегрирования ключи 1 и 2 замкнуты, на электромагнит фрикционной муфты блока 7 подано иапряжепие от источника 8 питания и подвижный диск ее выведен из зацепления с неподвижным (сидящим на оси дифференциала 5) диском. Поданное на вход демодулятора 9 напряжение интегрирования различается по фазе, сравнивается с поданным в противофазе опорным напряжением оп от источника 6, усиливается и поступает на вход коммутатора 10. В зависимости от полярности с выхода коммутатора 10 интегрируемое напряжение подается на вход одного из магнитных усилителей, например 11. В магнитном усилителе И напряжение интегрирования усиливается и подается на вход усилителя 13. Сюда же с выхода тахогенератора 15 в проти1юфазе со входным напряжением подается панряжение скоростной, обратной связи L/C. Усиленное в усилителе 13 напряжение подается на дрзгую обмотку управления двигателя 3. Выходной вал двигателя 3 начнет вращаться, поворачивать выходной вал дифференциала 5 па угол а пропорционально входному интегрируемому напряжению /7„ и времени иитегрирования. В случае противоположной полярности интегрируемого напряжения f/n в работу вступит
второй канал электромеханического интегратора, состоящий из магнитного усилителя 12, усилителя 14, двигателя 4 и тахогенераторз 16.
Использование изобретения позволит повысить точность интегрирования по сравнению с cvHiccTB 4OHU Mn аналогами.
Формула и 3 о б р е т е и и я
Электромеханический интегратор, содержащий ключи, усилители, к первому и второму входам первого усилителя подключены соответственно выходы первого магнитного
усилителя и первого тахоге 1ератора, а к первому и второму входам второго усилителя - выходы второго магннтного зсилителя и второго тахогенератора, двигатели, вал первого двигателя механически соединен с валом первого тахогенератора и первым входным валом дифференциала, вал второго двигателя- с валом второго тахогенератора и вторым входным валом дифференциала, а первые выводы первого и второго двигателей
подключены соответственно к выходам первого и второго усилителей, отличающийся тем, что, с целью повыщения точности интегратора, он содержит коммутатор, источник опорного напряжения, блок автоподстройки и демодулятор, первый и второй входы которого соединены соответственно с источником опорного напряжения и через первый ключ - со входом интегратора, выход демодулятора подключен ко входу коммутатора, выходы которого соединены соответственно со входами первого и второго магнитных усилителей, первый и второй входы блока автоподстройки подключены соответственно к источнику опорного напряжения и через второй ключ - к источнику питания, выходной вал дифференциала механически соединен с блоком автоподстройки, первый и второй вы-ходы которого подключены соответственно ко вторым выводам первого и второго двигателей.
Источники информации, принятые во вкимание при экспертизе
1.Навигационный индикатор НИ - 50ИМ, техническое описание и инструкция по монтажу и эксплуатации, М., Оборонгиз, 1963, с. 30-36, 93-94.
2.«Самолетные навигационные системы, под ред. Ю. В. Поляка, М., Воениздат, 1973,
с. 80-81.
Vc 1
-ITc
Bdfif.
I
c
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор | 1982 |
|
SU1062726A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Устройство для синхронизации информации,считываемой с магнитной ленты | 1980 |
|
SU982079A1 |
| Электромеханический интегратор | 1976 |
|
SU604007A1 |
| Устройство для воспроизведения с носителя магнитной записи | 1988 |
|
SU1624517A1 |
| Интерполирующее устройство для систем программного управления фрезерным станком | 1958 |
|
SU119054A1 |
| Устройство для передачи и приема модулированных по фазе и частоте сигналов | 1977 |
|
SU684750A1 |
| Устройство для измерения вихревого компонента скорости потока | 1980 |
|
SU924578A1 |
| Аналого-цифровой интегратор | 1981 |
|
SU1013978A1 |
| Хроматограф | 1959 |
|
SU130235A1 |