128
тележке робота, Датчик вьшолнен в виде двух колебательных контуров 3 и 4, подключенных к первому источнику питания 2. Для повьшения надежности захвата роботом груза датчики содержат дополнительные катушки 5 и 6, расположенные попарно в каждой точке останова. Индикатор представляет собой две катуш и 13 и 14, ось одной из которых параллельна, а другой - перпендикулярна оси колебатель- ных контуров датчика. Катушки подключены к фазовому детектору 12. Индикатор содержит тагоке механизм 17
Изобретение относится к машиностроению и может быть использовано для точного останова роботов-манипуляторов, движущихся по направляющим.
Целью изобретения является повьше ние надежности захвата роботом объекта, в частности контейнера, в случаях, когда контейнер установлен не строго в центре позиции склада.
На чертеже изображена блок-схема /предлохсенного устройства для точного останова.
Устройство точного останова со- AepKiiT датчики 1 позиций, расположенные в соответствующих местах останова, например в каждой ячейке склада. Склад имеет протяженную ячеистую структуру. Функция робота - взятие полного контейнера с транспортерной ленты и установка т его в одну из ячеек склада по программе с ЭВМ, а также взятие контейнера из ячейки склада и подача его к технологическому оборудованию. Управление роботом вблизи определенной заданной ячейки склада осуществляет устройство точного останова, датчики которого вьшолнены в виде подключенных к средней точке первого источника 2 питания колебательных контуров 3 и 4. Колебательные контуры подключены к крайним точкам первого источника питания через дополнительные катушки индуктивности 5 и 6, индуктивность которых больше И1ЗДУКТИВНОСТИ катушек 7 и 8 колебательных контуров. Дополнительные
для перемещения катушек индикатора относительно тележки в направлении Л. Датчик неремещения 19 служит для подачи в ЭВМ сигнала о возможности взятия контейнера захватом робота. При приближении тележки с роботом к зоне действия какого-либо датчика позиции индикатор анализирует магнитное поле колебательных контуров датчика и вьвдает сигнал, по котором принимается решение о наличии или отсутствии контейнера и при наличии последнего - о возможности взятия его захватом робота.2 з.п. ф-лы, I ил.
O
5
0
5
0
5
катушки 5 и 6 расположены в точке 9 останова, предназначенной для установки контейнера, и лежат по разные стороны от точки останова в плоскости, параллельной направлению Л перемещения робота. Катушки 5 и 6 имеют дугообразную форму и обращены друг к другу вогнутой стороной.
Катушки 7 и 8 колебательных контуров 3 и 4 расположены в зоне перемещения робота, симметрично оси 10 .точки останова, и их оси параллельны направлению перемещения робота.
Индикатор 11 монтируется на те- лежке робота и выполнен в виде связанных с входами фазового детектора 12 двух катушек 13 и 14, причем ось катушки 13 расположена параллельно, а катушки 14 - перпендикулярно оси катушек 7 и 8 колебательных контуров датчиков. Катушка 13 подключается через коммутатор 15 также и ко второму источнику 16 питания.
Устройство снабжено механизмом 17 перемещения катушек индикатора относительно тележки и дополнительным фазовым детектором 18, входы которого подключены ко второму источнику 16 питания и катушек 14 индикатора, а выход - к механизму перемещения катушек 17, дающему сигнал датчику 19 перемещения. Механизм перемещения катушек представляет собой двигатель и червячную пару, позволяющую перемещать по направлению А систему катушек на длину до 150 мм. Дат3
чик перемещения служит для подачи сигнала на ЭВМ о возможности взяти контейнера захватом робота и в случае невозможности - выдачи аварийного сигнала.
Устройство точного останова рабтает следующим образом.
При отсутствии контейнера в ячеке склада сопротивление дополнителных катушек 5 и 6 велико и ток, пр текающий через катушки колебательн контуров, незначителен, вследствие чего напряжение, индуцируемое в катушках индикатора при прохождении роботом данной позиции, также мало
Если контейнер в ячейке склада установлен, то сопротивление дополнительных катзтпек 5 и 6 уменьшаетс так как металлическое дно контейне играет роль короткозамкнутого витк в каждой из обмоток указанных катушек. Ток через катушки 7 и 8 возратает, увеличивая тем самым ток в катушках индикатора при приближении последнего к данному датчику п зиции. Сигнал с катушки 13 подается на амплитудный детектор (не показан и далее в ЭВМ, которая анализирует информацию о наличии или отсутствии контейнера в данном месте склада. Если напряжение, индуцируемое в катушке 13 в момент изменения полярности выходного сигнала с фазового детектора 12 мало, то тележка с роботом либо проедет мимо, либо по со ответствующей команде остановится и робот поставит контейнер в данную ячейку. Если напряжение, индуцируемое в катушке 13 больше заданного уровня, то робот по команде с ЭВМ остановится напротив данного места склада и возьмет контейнер для подачи его к технологическому оборудованию.
Учитывая возможное наличие на площадке ячейки склада небольших посторонних предметов,а также возможное смещение контейнера при втягивании захвата робота в исходное положение ось контейнера может смес титься относительно вертикали, проходящей через центр позиции. Поэтому операция захвата .контейнера без дополнительной коррекции положения робота может не осуществиться.
Для повьш1ение надежности захвата предлагаемое устройство и снабжено дополнительными катушками 5 и 6, раположенными попарно в каждой точке
останова. При этом при смещении контейнера относительно оси 10 точки останова токи в катушках 5 FI 6 будут различны, н связи с чем ось симметрии магнитного потока катушек 7 и 8 также смещается. Так как катушка 14 индикатора расположена перпендикулярно оси колебательных контуров датчика, то при смещении ее по направлению /) напряжение в ней меняет фазу при переходе оси катушки через ось 10. Сигнал с катушки поступает на фазовый детектор. В качестве опорного сигнала используется -напряжение с катушки 13, Выходное напряжение с фазового детектора управляет механизмом перемещения робота, поэтому тележка будет двигаться вблизи точки останова в направлении А до тех пор, пока сигнал не уменьшится до нуля, т.е. робот остановится напротив оси контейнера.
Для нахождения величины смещения контейнера относительно точки останова необходимо знать истинное место точки останова и положение оси контейнера. Положение контейнера характеризуется положением оси симметрии магнитного потока катушек 7 и 8 на частоте, напряжения, вырабатьшаемого первым источником 2 питания из-за влияния на ток через них сопротивлений катущек 5 и 6.
Ось симметрии магнитного потока на этой частоте находится с помощью катушек 13 и 1А в момент, когда напряжение с фазового детектора 12 равно нулю. При этом тележка робота останавливается и это также является первой точкой отсчета датчика 19 перемещений.
Истинное место точки останова определяется на частоте напряжения, вырабатьшаемого вторым источникм 16 питания, кратковременно включаемым с помощью коммутатора 15. На данной частоте резонансный ток в контурах 3 и 4, настроенных на частоту второго источника 16, мало зависит от сопротивлений дополнительных катушек 5 и 6, поэтому имеет место постоянное совпадение геометрической осио системы катзтпек 7 и 8 с осью симметрии магнитного потока этой системы, причем послэдняя находится с помощью механизма 17 перемещения, управляемого фазовым детектором 18.
Выходная величина сигнала сдатчика 19 перемещения от момента равенства нулю сигнала с фазового детектора 12 до момента нуля с фазового детектора 18 является функцией, характеризующей смещение контейнера относительно точки останова. Этот сигнал подается в ЭВМ для принятия решения о возможности взятия контейнера или о подаче аварийного сигнала.
Формула изобретения
1, Устройство для точного останова робота, включающее датчики позиции, установленные в соответствующих точках останова, индикатор дифферен- диального типа, установленный на те- лежке робота, саязанный с приводом ее перемещения и дающий информацию о пололсении тележки относительно датчиков 1103И1ЩИ, а также источники питания, о т л и чающее с я тем, что, с целью повышения надежности в работе, каждый датчик позиции выполнен в виде двух колебательных контуров, подключенных одними концами к средней точке первого источника питания, а другиьи концами через дополнительные катушки, индуктивность которых превьтшет индуктивность катушек колебательных контуров, - к соответств- пощим крайним точкам первого источника питания, причем магнитные оси дополнительных катушек расположены в плоскости, параллельной направлению перемеи е- ния робота, и лежат по разны.е стороны от точки останова робота, катушки колебательных контуров расположены в зоне г еремещения робота симметрично относительно точки останова и их магнитные оси параллельны
Р ед а к т о р К, В о л о щу к Заказ 7344/14
Составитель С, ьугров
Техред Л.Сердюкова Корректор А. Обручар
Тираж 949Подписное
ВИШЩИ Государственного комитета СССР
по делам изобретений и открытий 1113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производствеано-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
направлению перемещения робота, а индикатор состоит из двух катушек индуктивности, первая из которых подключена к первому и второму входам фазового детектора и ее магнитная ось расположена перпендикулярно направлению движения робота, а вторая - к третьему и четвертому входам фазового детектора и ее маг-
нитная ось параллельна направлению движения робота, причем первая катушка индикатора также подключена через коммутатор ко второму источнику питания, имеющему большую частоту переменного напряжения, чем Первый источник.
2.Устройство,, по п. 1, отличающееся тем, что дополнительные катушки датчика позиции имеют дугообразную форму и обращены друг к другу вогнутой стороной, причем максимальная щирина дополнительной катущки и рабочая длина катушки колебательного контура датчика позиции равны удвоенному допуску на точность установки перемещаемого роботом объекта.
3.Устройство по пп. 1 и 2, о т - личающеесп тем, что, оно
снабжено механизмом перемещения катушек индикатора относительно тележки робота с датчиком этого перемещения и дополнительным фазовым детектором, первъш и второй входы которого соединены с концами катушки индикатора, магнитная ось которой распо- ложена перпендикулярно направл.еншо движения робота, а третий и четвер- тьш входы - с вторьш источником питания, причем выход дополнительного фазового детектора соединен с входом .механизма перемещения катушек индикатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| Электронная шахматная доска и способ ее работы | 2017 |
|
RU2640171C1 |
| СТИРАЛЬНАЯ МАШИНА | 2005 |
|
RU2303668C2 |
| СПОСОБ ЛЕЧЕНИЯ НЕЙРОГЕННОЙ ДИСФУНКЦИИ МОЧЕВОГО ПУЗЫРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2241503C2 |
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 1999 |
|
RU2168201C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА РЕПАРАТИВНУЮ РЕГЕНЕРАЦИЮ КОСТНОЙ ТКАНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279901C2 |
| Векторный автономный регистратор | 2023 |
|
RU2799973C1 |
Изобретение относится к области машиностроения и может быть использовано для точного останова роботов, движущихся по направляющим. Целью изобретения является повышение надежности захвата груза роботом, определение и корректировка отклонения груза от центра позиции склада. Устройство содержит датчики позиции 1, расположенные в каждой точке останова, и индикатор 11, монтирующийся на 2 2 (Л ЭО СО /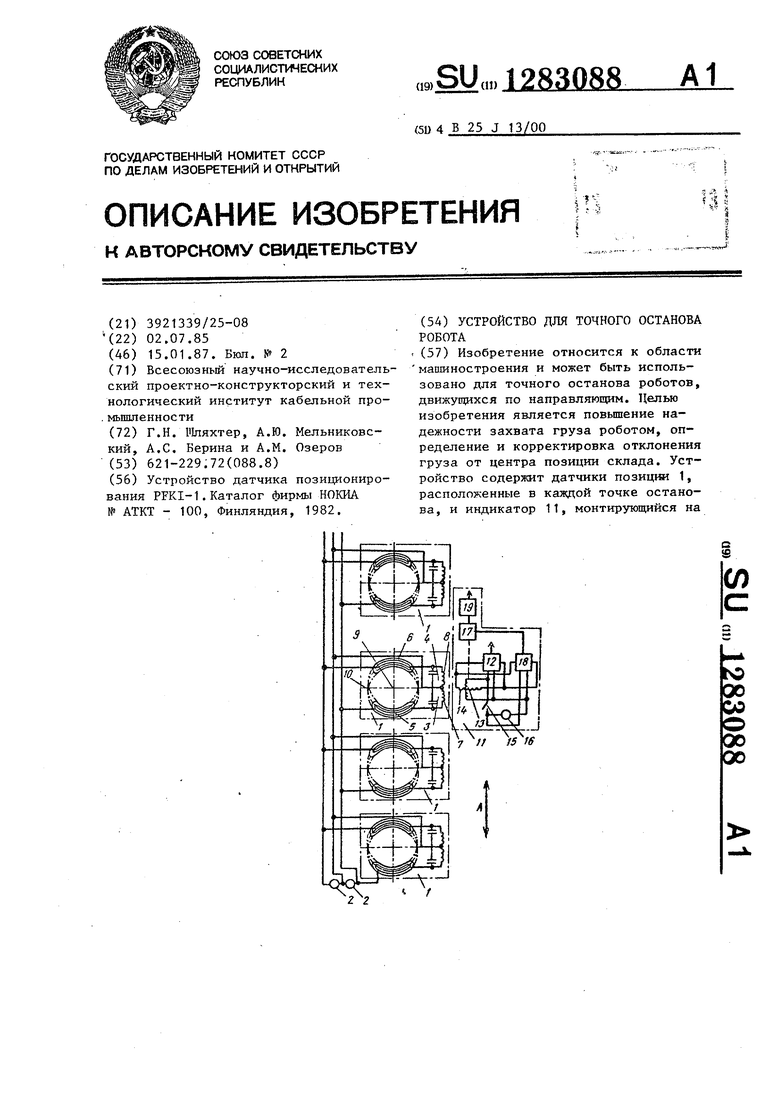
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
