Изобретение относится к автоматическому управлению и может быть использовано в робототехнике, в частности, для управления движением транспортных средств вдоль заданного токонесущим проводом направления, эксплуатируемых при больших неровностях пола и в системах с адресацией рабочих мест и контрольных точек производства.
Известно устройство для управления движением транспортного средства [Авторское свидетельство СССР №1524714, кл. G05D 1/02], содержащее индукционный датчик, установленный на транспортном средстве с возможностью взаимодействия с токонесущим проводом, подключенным к генератору переменного тока и уложенным на местности в соответствии с заданной траекторией движения транспортного средства. Усилительно-преобразовательный блок этого устройства связан с индукционным датчиком и аналого-цифровым преобразователем, который последовательно соединен с вычислительным блоком и сервоприводом, образующими подсистему управления по трассе. Кодовый датчик, установленный с возможностью взаимодействия с амплитудно-фазовыми датчиками, расположенными в местах причала транспортного средства и образованными из токонесущего провода, причем кодовый датчик, m-канальный усилитель, детекторы, пороговое устройство, регистр, элемент ИЛИ-НЕ, формирователь импульсов, элемент И-НЕ, счетчик образуют подсистему декодирования оборудования и точного позиционирования.
Недостатком этого устройства являются ограниченные возможности применения индукционного датчика и всей подсистемы управления транспортным средством по трассе, для чего требуются кодовый датчик и подсистема декодирования оборудования и точного останова. Кроме того, использование аналогового сигнала от индукционного датчика, величина которого пропорциональна отклонению транспортного средства от трассы, связано с ошибками в системе управления при эксплуатации транспортного средства с большими неровностями местности, по которой оно передвигается. Сложна техническая реализация устройства.
Наиболее близким по технической сущности и достигаемому эффекту является устройство для управления движением транспортного средства [Авторское свидетельство СССР №1783481, кл. G05D 1/02 (прототип)], содержащее индукционный датчик (датчик магнитного поля), установленный на транспортном средстве с возможностью взаимодействия с токонесущим проводом, подключенным к генератору переменного тока, уложенным на местности в соответствии с заданной траекторией движения транспортного средства. Аналого-цифровой преобразователь, информационный вход которого соединен с выходом усилительно-выпрямительного блока, а выход - с входом формирователя команд (микроконтроллером), первый выход которого связан с входом сервопривода, и амплитудно-фазовые датчики, расположенные в местах причала транспортного средства и образованные токонесущим проводом. Кроме того, устройство содержит коммутатор (аналоговый), а индукционный датчик выполнен в виде К пар соосно расположенных катушек, включенных попарно дифференциально, магнитные центры которых расположены в плоскости, поперечной (перпендикулярной) токонесущему проводу, последовательно друг за другом, причем у одной из пар катушек, являющейся центральной, магнитный центр расположен над токонесущим проводом, выходы пар катушек подключены к соответствующим информационным входам коммутатора, выход которого соединен с входом усилительно-выпрямительного блока. При этом управляющий вход коммутатора соединен со вторым выходом формирователя команд (выходом управления коммутатором), третий выход которого связан с входом запуска аналого-цифрового преобразователя, П-образные петли амплитудно-фазового датчика, последовательно кодирующие два разряда кода причала в J-системе счисления, расположены по нормали в противоположных направлениях от траекторий движения транспортного средства, уложены на местности симметрично относительно пункта точного останова, находящегося на пересечении оси точного позиционирования и заданной траектории движения, размер каждой петли по нормали к токонесущему проводу равен произведению расстояния между двумя соседними магнитными центрами индукционного датчика на значение разряда кода причала в J-системе счисления, которое равно количеству магнитных центров, охватываемых петлей при расположении над ней индукционного датчика симметрично относительно магнитного центра центральной пары катушек.
Недостаток известного устройства заключается в том, что оно не обеспечивает решения следующих важных задач управления:
- возможности дистанционного управления процессом передвижения транспортного средства;
- возможности изменения маршрута движения по гибкой программе из-за жесткой структуры системы управления, что существенно уменьшает качество управления процессом;
- увеличение точности позиционирования приводит к повышению сложности прокладки кабеля и требует повышения качества изготовления индукционного датчика;
- для задания трассы используется токонесущий провод, по которому протекает переменный ток, и, следовательно, для задания нескольких трасс необходимо воспользоваться несколькими генераторами переменного тока, что также усложняет реализацию;
- малая чувствительность индукционного датчика;
- требуются дополнительные схемы согласования с датчиком.
Изобретение направлено на повышение качества управления движением транспортного средства, использование дистанционного управления, возможность интеграции в складскую SCADA-систему, а также на создание на его базе распределенных систем автоматического управления движением транспортного средства.
Это достигается тем, что устройство содержит трассовый токонесущий кабель, соединенный с источником постоянного тока и уложенный на местности с учетом заданной траектории движения транспортного средства, меток RFID, используемых вместо П-образных петлей, установленных в местах позиционирования транспортного средства, модуля считывателя меток RFID, расположенного непосредственно на транспортном средстве, который соединен с входом управляющего микроконтроллера посредством цифрового интерфейса, модулей ZigBee, установленных на транспортном средстве, а также на ЭВМ верхнего уровня и в местах склада, где это необходимо для поддержания качества беспроводного сигнала; модуль ZigBee, расположенный на платформе, служащий для связи с ЭВМ верхнего уровня, подключен к управляющему микроконтроллеру через порт двухстороннего обмена, передний и задний датчики магнитного поля, закрепленные на платформе так, чтобы взаимодействовать с трассовым токонесущим проводом, инфракрасные датчики препятствий, модуль драйверов, служащий для управления сервоприводами, соединенный с ШИМ выходами микроконтроллера.
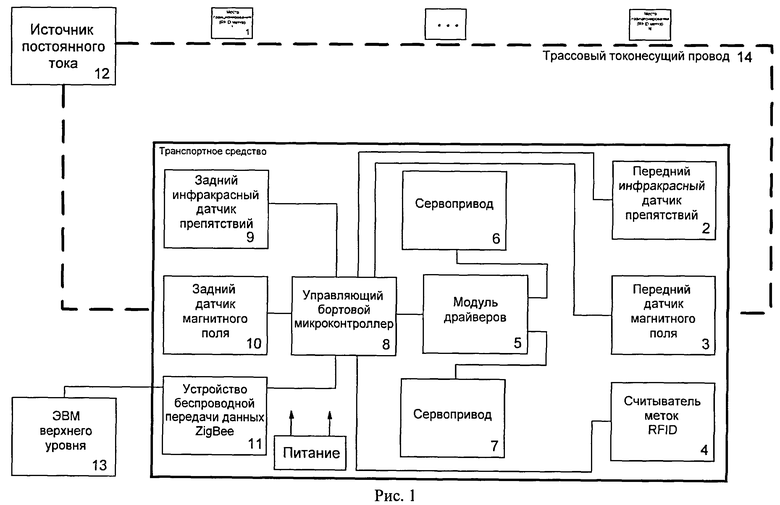
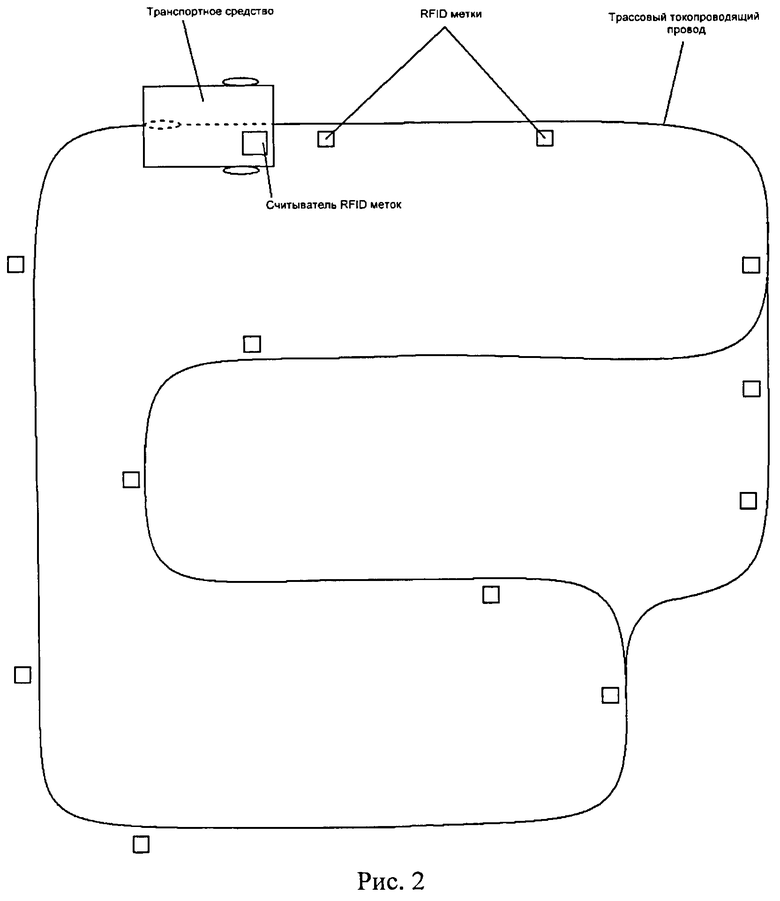
Изобретение поясняется графическими материалами, где на рис.1 изображено микроконтроллерное устройство для управления движением транспортного средства, на рис.2 изображена возможная траектория движения транспортного средства с расположением RFID-меток на полу вдоль трассы возле точек останова и ветвления трассы, на рис.3 изображен общий алгоритм работы устройства.
Для задания трассы устройства используются трассовый токонесущий провод, уложенный на местности и подключенный к источнику постоянного тока.
Микроконтроллерное устройство для управления движением транспортного средства, показанное на рис.1, содержит метки RFID 1,2, …, n-1, n, расположенные на полу в местах точного позиционирования транспортного средства. На транспортном средстве установлен считыватель RFID-меток 4, который может взаимодействовать с RFID-метками. Датчики магнитного поля 3, 10 установлены на мобильном транспортном средстве, с возможностью взаимодействия с трассовым токонесущим проводом 14, причем они расположены в различных частях транспортного средства: спереди и сзади. Сигналы с датчиков подаются на входы управляющего бортового микроконтроллера 8 в виде цифрового сигнала по шине I2C, выход микроконтроллера связан с устройством беспроводной передачи данных ZigBee 11. Инфракрасные датчики 2, 9 служат для обнаружения препятствий на пути и устанавливаются на бамперах транспортного средства.
По маршруту движения транспортного средства, т.е. в местах его точного позиционирования, устанавливаются RFID-метки 1,2, …, n-1, n, которые выполнены в виде законченного схемотехнического решения и выпускаются промышленно.
Датчики магнитного поля 3, 10 являются готовым схемотехническим решением на базе магниторезисторов, представляют собой микросхему цифрового компаса и выпускаются промышленно (например, LSM303DLH). Микросхема позволяет измерять не только напряженность магнитного поля, но и ускорение по осям. Чувствительным элементом для магнитометрической части служит магниторезистор. Для улучшения характеристик магниторезисторы объединяют в измерительные мосты. Так как сигнал, снимаемый с моста порядка мВ, то для согласования с АЦП последующих устройств применяются усилители. В данной микросхеме также присутствует логическое устройство, которое преобразует уровни напряжения в коды цифрового интерфейса.
Кодирование причалов осуществляется при помощи RFID-меток, представляющих собой устройства, в которые посредством радиосигналов считываются и записываются данные. Около каждого места останова на полу закрепляется RFID-метка 1. Используются метки, работающие на частоте 13,56 МГц (не лицензируемый диапазон частот) и имеющие дальность действия 0,1-0,25 м, целесообразность использования данного подхода обусловлена следующими достоинствами RFID-меток: не требовательны к чистоте поверхности, не потребляют энергии в режиме ожидания, имеют неограниченный срок службы, не требуют специальных знаний и средств для установки. На мобильном транспортном средстве установлен RFID-считыватель, который при приближении к меткам может считать код, заранее запрограммированный в них, и однозначно идентифицировать объект.
Сервоприводы 6, 7 предназначены для перемещения транспортного средства по заданному маршруту и выполнены, например, в виде двух двигателей постоянного тока с редуктором, для управления которыми используется специальный модуль драйверов 5, подключенный к выходам микроконтроллера, генерирующнго широтно-импульсную модуляцию (ШИМ).
Блок связи со складской системой ZigBee 11 предназначен для получения и передачи данных информации от микроконтроллера 8 на ЭВМ верхнего уровня 13, которая регламентирует функционирование складской системы. В качестве беспроводной технологии передачи данных выбрана технология ZigBee, так как она обеспечивает самовосстановление и гарантированную доставку пакетов в случаях обрыва связи между отдельными узлами (появления препятствия), перегрузки или отказа какого-то элемента, устройства имеют низкое энергопотребление, невысокую стоимость.
Устройство работает следующим образом.
По маршруту движения транспортного средства уложен трассовый токонесущий провод 14, по которому протекает постоянный ток, создающий магнитное поле. С этим магнитным полем взаимодействуют датчики магнитного поля 3, 10, закрепленные на транспортном средстве.
В исходном состоянии датчики магнитного поля 3, 10 устанавливаются непосредственно над токонесущим проводом 14 (высота h порядка нескольких сантиметров), один в передней части платформы и один сзади, таким образом, чтобы одна из осей (например, х) располагалась перпендикулярно плоскости укладки провода.
Магниточувствительный элемент датчика (магниторезистивный мост) воспринимает величину напряженности магнитного поля с нелинейной статической характеристикой. Сигнал с мостов усиливается и посредством обработки логическим устройством микросхемы, встроенным в датчик, преобразуется в цифровой сигнал, который воспринимается управляющим микроконтроллером 8. Так как детектирование производится по трем осям, то отклонение отследить можно в плоскости проложенного кабеля. Установка двух датчиков позволяет однозначно определить отклонение от кабеля. Выводы микросхем магнитометра соединены с выводами микроконтроллера.
Для определения величины отклонения микроконтроллер 8 опрашивает датчики магнитного поля. Один из датчиков выбирается в качестве опорного, т.к. платформа движется в основном вперед, то выбирается датчик, расположенный спереди транспортного средства. В том случае, когда он находится непосредственно над токонесущим проводом или смещен относительно него на расстояние, не превышающее p=1 мм, отклонение транспортного средства от заданной траектории считается равным нулю. Второй магниторезистивный датчик, расположенный сзади транспортного средства, используется в качестве вспомогательного. Далее происходит вычисление величины отклонения по формуле:

где y01, y02 - величины сигналов с переднего и заднего магниторезистивных датчиков при нахождении их непосредственно над проводом, y1, y2 - величины текущих значений сигналов с магниторезистивных датчиков, k - коэффициент преобразования показаний датчиков в величину отклонения от токонесущего провода.
Информация об отклонении ε используется для вычисления управляющего воздействия на сервоприводы 6, 7, которое формируется таким образом, чтобы транспортное средство возвращалось на заданную траекторию движения, т.е. желаемый закон изменения управляемой величины имеет вид ε(t)=0. В случае отличия ε от нуля происходит коррекция курса транспортного средства, за счет ускорения или замедления одного из ведущих колес.
С помощью оборудования RFID (считывателя 4 и меток 1, 2, …, n-1, n) производится декодирование мест точного останова. При приближении транспортного средства к метке происходит ее возбуждение (метка становится активной) и считыватель, прочитав код с этой метки, отправляет его микроконтроллеру 8. На основе этого кода однозначно определяется, возле какого технологического оборудования в данный момент находится транспортное средство и необходима ли остановка.
Рассмотрим общий алгоритм работы устройства (рис.3), позволяющий решить все задачи, возникающие при управлении транспортным средством. После включения питания на платформе происходит инициализация всех электронных компонентов (обнуляются переменные, настраиваются протоколы общения между устройствами). Далее микроконтроллер 8 проверяет, есть ли задание от складской системы, и в случае, если задание не обнаружено, ждет его.
При поступлении задания происходит анализ положения на трассе, и в случае, если робот вне трассы, то происходит выполнение подпрограммы «Авария» (двигатели останавливаются, подается звуковая и световая сигнализация, отправляется сообщение об аварии по радиоканалу к ЭВМ верхнего уровня). Если же мобильное транспортное средство на трассе, то выполняется подпрограмма «Стабилизация курса». В этой подпрограмме определяется положение транспортного средства над токонесущим проводом, а также формируется управляющее воздействие на сервопривод. Транспортное средство начинает двигаться в сторону первого места останова. В процессе этого микроконтроллер, опрашивая считыватель RFID-меток, проверяет, найдена ли заданная метка, если да - то выполняется задание, предписанное для этой метки (останов, поворот, разворот, разгрузка и т.п.). В случае обнаружения препятствия на пути следования транспортного средства, происходит остановка платформы, а на ЭВМ оператора отправляется сообщение о наличии помехи движению, как только помеха устранена, транспортное средство автоматически продолжает движение по заданному маршруту, извещая об этом оператора. После выполнения задания система посылает запрос на следующее задание от верхнего уровня. При отсутствии задания от складской системы в течение некоторого времени, которое также может быть задано, микроконтроллер переводит систему в режим пониженного энергопотребления, питание остается только на блоке связи.
Связь ЭВМ верхнего уровня (складской системой) с микроконтроллером 8 осуществляется по радиоканалу 11, применяется беспроводная технология ZigBee. С ЭВМ верхнего уровня можно контролировать параметры работы транспортного средства, задавать выполняемые операции и траекторию движения, а также изменять переменные, отвечающие за расчет управляющего воздействия на сервоприводы 6, 7, скорости передвижения транспортного средства, время на выполняемые операции, действие при обнаружении причала (проехать или остановиться); кроме того, на ЭВМ оператора при желании пользователя могут создаваться файлы отчета о маршрутах движения транспортного средства, препятствиях, возникших на пути, отклонениях от трассового токонесущего провода 14 в процессе передвижения транспортного средства.
Использование предлагаемого микроконтроллерного устройства для управления движением транспортного средства позволяет по сравнению с прототипом повысить качество управления процессом движения транспортного средства, увеличить гибкость системы за счет наличия дистанционного управления с ЭВМ верхнего уровня, повысить эффективность, надежность и упростить структуру за счет использования современной элементной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ И СКЛАДИРОВАНИЯ КОНТЕЙНЕРОВ, ОСНАЩЕННЫХ РАДИОЧАСТОТНЫМИ ИДЕНТИФИКАЦИОННЫМИ МЕТКАМИ, НА СТАЦИОНАРНЫХ И ПОДВИЖНЫХ СКЛАДАХ | 2007 |
|
RU2343100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ ВЫСОКОСКОРОСТНОГО СОСТАВА (ВАРИАНТЫ) | 2022 |
|
RU2816417C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2345944C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ МЕТОК В УЧЕБНОМ ЗАВЕДЕНИИ | 2023 |
|
RU2814844C1 |
| СИСТЕМА СБОРА И ПЕРЕДАЧИ ИДЕНТИФИКАЦИОННЫХ ДАННЫХ | 2023 |
|
RU2815605C1 |
| Способ и система организации продаж в магазинах самообслуживания | 2017 |
|
RU2674881C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2619843C1 |
Изобретение относится к автоматическому управлению движением транспортных средств вдоль заданного токонесущим проводом направления. Технический результат заключается в расширении функциональных возможностей за счет обеспечения возможности использования транспортного средства с адресацией мест его остановки. Устройство содержит два магниторезистивных датчика и считыватель RFID меток, установленные на транспортном средстве, источник постоянного тока, подключенный к токонесущему проводу, два электропривода, источник питания и бортовое вычислительное микропроцессорное устройство, устройство управления электроприводами, устройство беспроводной связи с автоматизированным рабочим местом оператора, инфракрасные датчики препятствий, служащие для обнаружения препятствий на пути следования транспортного средства, RFID метки, установленные на местности напротив точек остановки. 3 ил.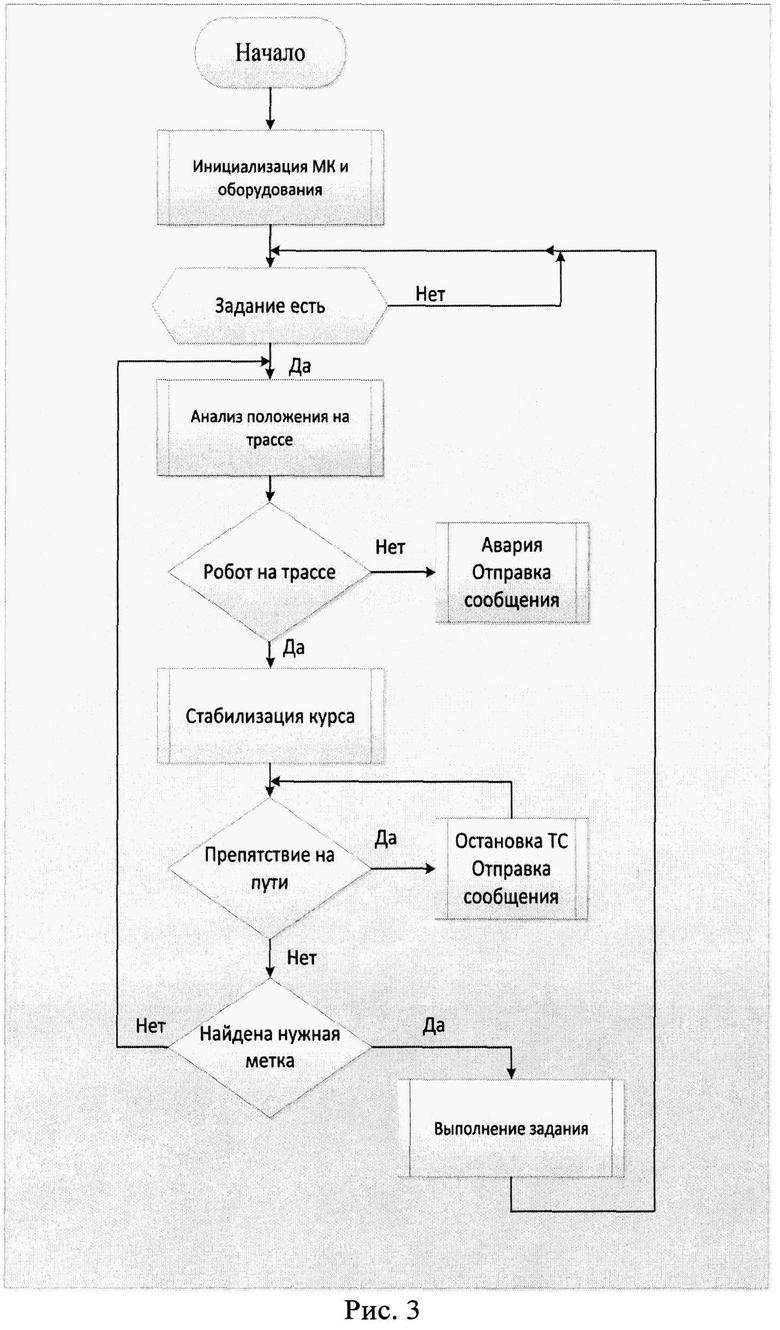
Автоматическая система управления движением транспортного средства, содержащая управляющий бортовой микроконтроллер, два сервопривода с редукторами на каждом ведущем колесе, отличающаяся тем, что система содержит передний и задний датчики магнитного поля, закрепленные на платформе, выходы которых соединены с двумя входами бортового микроконтроллера, третий и четвертый входы его связаны с выходами переднего и заднего инфракрасных датчиков препятствий соответственно, а пятый вход - с выходом считывателя меток RFID, установленных в местах позиционирования по траектории, заданной электрическим трассовым кабелем, ШИМ выходы бортового микроконтроллера через модуль драйверов соединены с сервоприводами, а порт его двухстороннего обмена через устройство беспроводной связи передачи данных ZigBee связан с ЭВМ верхнего уровня, все элементы бортовой системы по питанию связаны с мобильным бортовым источником питания, а трассовый кабель соединен с источником постоянного тока.
| Способ получения клея | 1940 |
|
SU62718A1 |
| Ультрафиолетовый поляриметр | 1959 |
|
SU123735A1 |
| Система управления движением транспортного средства | 1979 |
|
SU960746A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

