Изобретение относится к автоматическому управлению и может быть использовано в робототехнике, в частности, для управления движением транспортных средств вдоль заданного токонесущим проводом направления, эксплуатируемых при больших неровностях пола, и в системах с адресацией рабочих органов
Известно устройство для автоматического управления движением самоходного средства-, содержащее датчик сигнала переключения структуры (кодовый датчик), программный блок, соединенный с сервоприводом органов управления самоходного средства, чувствительный элемент с индукционным датчиком, установленным с возможностью взаимодействия с токонесущим проводом, подключенным к генератору и уложенным на местности в соответствии с заданной траекторией движения самоходного средства; устройство снабжено также амплитудно-фазовым датчиком, амплитудно-фазовым детектором и дешифратором кодов; амплитудно-фазовые датчики образованы контурами из токонесущего провода и расположены в местах смены структуры.
Недостатком такого устройства являют- ся ограниченные возможности применения индукционного датчика как кодового датчика; поэтому в системе автоматического управления движением транспортного средства предусмотрены два типа датчиков, индукционный и кодовый, и соответствующие подсистемы управления по трассе и декодирования оборудования, что приводит к усложнению технической реализации системы.
Известно также устройство определения отклонения транспортного средства от заданной траектории, эксплуатируемого при больших неровностях пола, содержащее три пары катушек (индукционный дат- чик), установленных на роботе в горизонтальной плоскости, причем две пары катушек расположены на определенном расстоянии друг от друга п рбдольной оси транспортного средства, а третья пара установлена, как и первые две пары катушек, на магнитном стержнеТось которого перпендикулярна направляющему токонесущему проводу, уложенному на местности, причем магнитный центр третьей катушки расположен между первыми 7(йумя парами катушек.
Таким образом, за счет дополнительной пары катушек частично устраняется неровность местности, по которой перемещается транспортное средство. Однако такой индукционный датчик имеет ограничение по зоне отклонения транспорта от токонесущего провода, которое обусловлено областью линейности статической характеристики ка- тушек и сохраняется при относительно небольших отклонениях по высоте. Кроме того, в самом методе измерения отклонения транспортного средства от токонесущего провода заложена методическая погреш- ность, суть которой заключается в следующем. Так как катушки включены дифференциально, то отклонение вправо или влево от токонесущего провода вызывает появление ЭДС на выходе индукционно- го датчика с соответствующим значением фазы, причем, чем больше отклонение, тем больше ЭДС, однако чувствительность датчика зависит еще и от расстояния от датчика до токонесущего провода, и при больших неровностях пола будут вноситься искажения в показания индукционного датчика.
Кроме того, известно устройство для управления движением транспортного средства, содержащее индукционный датчик.
установленный на транспортном средстве с возможностью взаимодействия с токонесущим проводом, подключенным к генератору переменного тока и уложенным на местности в соответствии с заданной траекторией движения транспортного средства, усилительно-преобразующий блок, связанный с индукционным датчиком и аналого-цифровым преобразователем,который последовательно соединен с вычислительным блоком и сервоприводом, образующими подсистему управления по трассе, кодовый датчик, установленный с возможностью взаимодействия с амплитудно-фазовыми датчиками, расположенными в местах причала транспортного средства и образованными из токонесущего провода, причем кодовый датчик, m-канальный усилитель, детекторы, пороговое устройство, регистр,элемент ИЛИ-НЕ, формирователь импульсов, элемент И-НЕ, счетчик образуют подсистему декодирования оборудования и точного позиционирования.
Недостатком этого устройства являются ограниченные возможности применения индукционного датчика и всей подсистемы управления транспортным средством по трассе в случаях с адресацией рабочих органов, для чего требуются кодовый датчик и подсистема декодирования оборудования и точного останова. Кроме того, использование аналогового сигнала от индукционного датчика, величина которого пропорциональна отклонению транспортного средства от трассы, связано с ошибками в системе управления при эксплуатации транспортного средства с большими неровностями местности, по которой оно передвигается. Сложна техническая реализация устройства
Цель изобретения - упрощение и расширение области применения устройства за счет обеспечения возможности использования транспортного средства в случаях с адресацией его останова
Указанная цель достигается тем, что устройство для управления движением транспортного средства, содержащее индукционный датчик, установленный на транспортном средстве с возможностью взаимодействия с токонесущим проводом, подключенным к генератору переменного тока, уложенным на местности в соответствии с заданной траекторией движения транспортного средства, аналого-цифровой преобразователь, информационный вход которого соединен с выходом усилительно-выпрямительного блока, а выход - с входом формирователя команд, первый выход которого связан с входом сервопривода, и амплитудно-фазовые датчики, расположенные в местах причала транспортного средства и образованные токонесущим проводом, оно дополнительно содержит коммутатор, а индукционный датчик выполнен в виде К пар соосно расположенных катушек, вклю- ценных попарно дифференциально, магнитные центры которых расположены в плоскости, поперечной токонесущему проводу, последовательно друг за другом, причем у одной из пар катушек являющейся центральной, магнитный центр расположен над токонесущим проводом, выходы пар катушек подключены к соответствующим информационным входам коммутатора, выход которого соединен с входом усилительно- выпрямительного блока, при этом управляющий вход коммутатора соединен с вторым выходом формирователя команд, третий выход которого связан с входом запуска ана- ло.го-цифрового преобразователя, П-образные петли амплитудно-фазового датчика, последовательно кодирующие два разряда кода причала в J-системе счисления, расположены по нормали в противоположные стороны от траектории движения транспортного средства, уложены на местности симметрично относительно центра точного останова, находящегося на пересечении оси точного позиционирования и заданной траектории движения, размер каждой петли по нормали к токонесущему проводу равен произведению расстояния между двумя соседними магнитными центрами индукционного датчика на значение разряда кода причала в J-системе счисле- ния, которое равно количеству центров, охватываемых петлей при расположении над ней индукционного датчика симметрично относительно магнитного центра центральной пары катушек.
Магнитные центры каждой пары катушек расположены поперечно токонесущему проводу и последовательно друг за другом с шагом, определяющим точность измерения отклонения транспортного средств от заданной траектории движения. Индукционный датчик предложенной конструкции позволяет осуществлять контроль за отклонением транспортного средства от заданной траектории движения с указанной точностью и дополнительно к основным своим функциям позволяет проводить декодирование причалов, если кодирование осуществляется последовательным кодом. В связи с использованием разработанного индукционного датчика, имеющего расширенные функциональные возможности, осуществлена новая техническая реализация системы для автоматического управления движением транспортного средства, включающая дополнительно к известным элементам системы коммутатор, связанный информационными входами с индукционным датчиком, состоящим из К пар катушек, а выходом - с усилительно-выпрямительным блоком, причем управляющий вход коммутатора соединен с формирователем команд, осуществляющим управление коммутатором по заданной программе. Кроме того, следует отметить, что разработанная система автоматического управления движением транспортного средства выполняет функции подсистемы декодирования оборудования и точного останова транспортного средства, причем техническая реализация ее значительно упрощена по сравнению с существующими. Предлагается также техническая реализация амплитудно-фазового датчика в виде Л-образной петли, с помощью которой можно последовательно кодировать два разряда кода причала в J-системе счисления, при этом петли расположены по нормали в противоположные стороны от траектории движения транспортного средства и уложены на местности симметрично относительно центра точного останова, находящегося на пересечении оси точного позиционирования и заданной траектории движения, причем размер каждой петли по нормали к токонесущему проводу равен произведению расстояния между магнитными центрами на значение разряда кода причала в J-системе счисления, которое равно количеству магнитных центров, охватываемых петлей при расположении над ней индукционного датчика относительно центральной пары катушек Дополнительное применение разработанного амплитудно-фазового датчика позволяет уменьшить количество контуров амплитудно-фазового датчика по сравнению с прототипом.
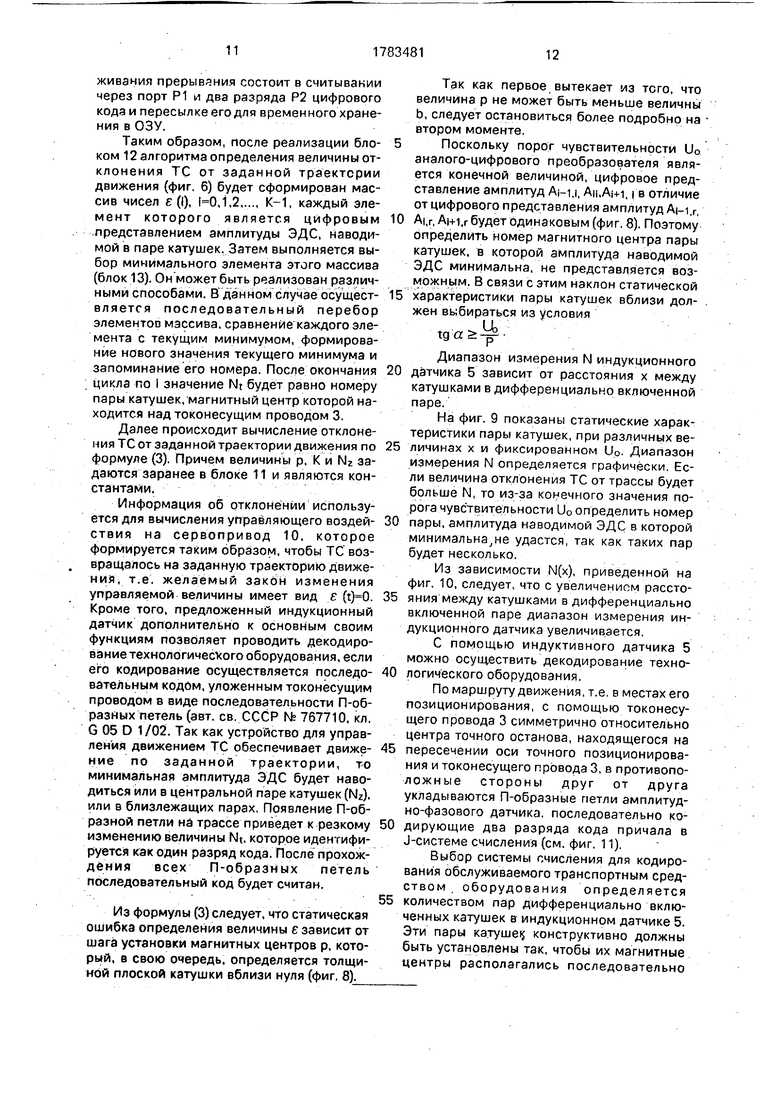
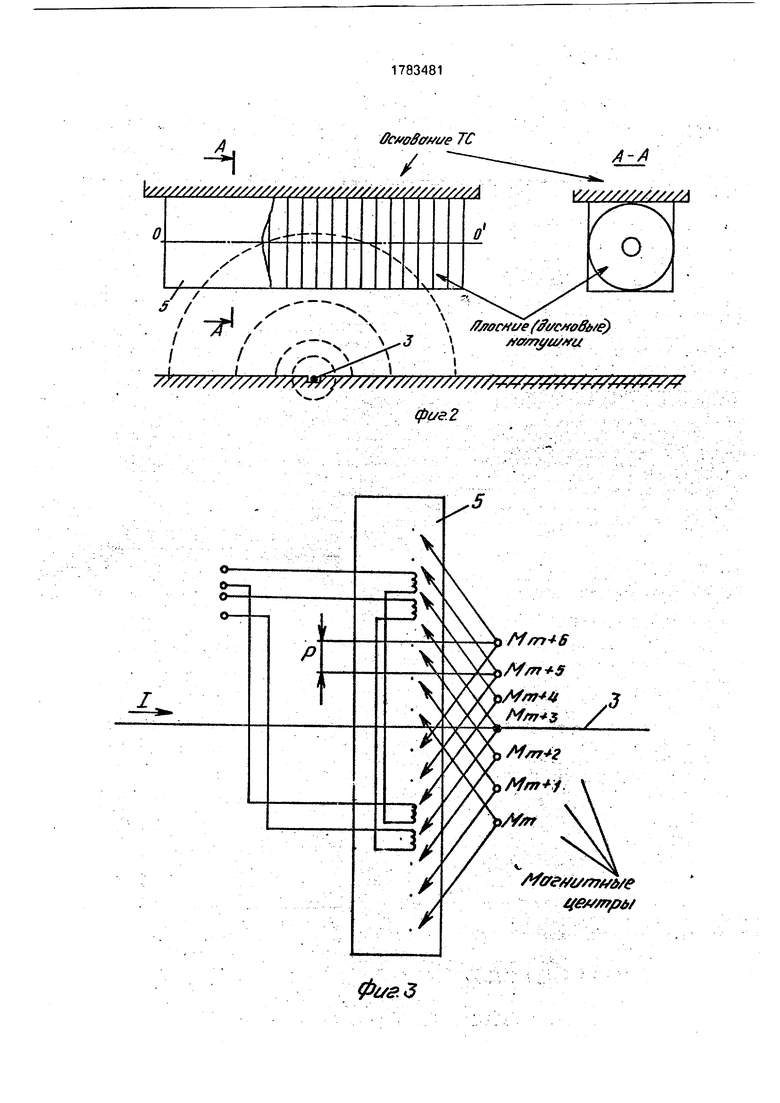
На фиг. 1 показана схема устройства для управления движением транспортного средства; на фиг. 2 - конструкция индукционного датчика и его размещение на транспортном средства; на фиг. 3 - схема включения К пар плоских катушек; на фиг, 4 - статическая характеристика дифференциального индукционного датчика; на фиг 5 - статическая характеристика индукционного датчика для его различных положений нг.д токонесущим проводом; на фиг. 6 - алгоритм определения величины отклонения транспортного средства от заданной траектории движения; на фиг. 7 - техническая реализация системы автоматического управления транспортным средством; на фиг, 8 - статические характеристики индукционного датчика, поясняющие методику выбора
его технической реализации из заданной точности; на фиг. 9 - статические характеристики одной пары дифференциально включенных катушек для разных расстояний между ними; на фиг. 10 - зависимость диапазона измерения индукционного датчика от выбранного расстояния между дифференциально включенными катушками; на фиг. 11 - амплитудно-фазовый датчик, над которым размещен индукционный датчик; на фиг. 12 - фрагмент взаимодействия амплитудно-фазового датчика и индукционного датчика; на фиг. 13 - общий алгоритм работы вычислительного блока; на фиг. 14 - функциональная схема коммутатора; на фиг. 15 - практическая реализация коммутара.
Устройство содержит амплитудно-фазовые датчики 1,2п-2, п-1, п, установленные в местах позиционирования транспортного средства (ТС) и уложенные с помощью токонесущего провода 3, питаемого генератором переменного тока 4. Над токонесущим проводом расположен индукционный датчик 5, взаимодействующий с ним, соединенный с аналоговым коммутатором б, сигнал с выхода которого усиливается усилительно-выпрямительным блоком 7 и передается на вход аналого-цифрового преобразователя 8, цифровая информация с выхода которого поступает в формирователь команд 9, осуществляющий выдачу управляющих воздействий на сервопривод 10. Кроме того, формирователь команд 9 вырабатывает цифровые сигналы для управления аналоговым коммутатором 6 и аналого-цифровым преобразователем 8 (фиг. 1)
Устройство работает следующим образом. По маршруту движения транспортного средства уложен токонесущий провод 3, по которому протекает переменный ток, создающий цилиндрическое магнитное поле. С этим полем взаимодействует индукционный датчик 5, закрепленный на ТС и выполненный в виде сборки четного числа плоских {дисковых) катушек, установленных соосно (ось 00) вплотную друг к другу {фиг. 2).
Пары плоских (дисковых) катушек включены дифференциально, причем их магнитные центры Mm. Mm+iМпи-ь расположены
поперечно токонесущему проводу 3 с шагом р, определяющим точность измерения отклонения ТС от заданной траектории (фиг. 3).
В исходном состоянии индукционный датчик 5 устанавливается над токонесущим проводом 3 (высота h порядка нескольких сантиметров) таким образом, что плоскости катушек перпендикулярны поверхности укладки токонесущего провода 3 и продольная ось индукционного датчика 5 (ось ОО)
перпендикулярна токонесущему проводу 3 (фиг. 2).
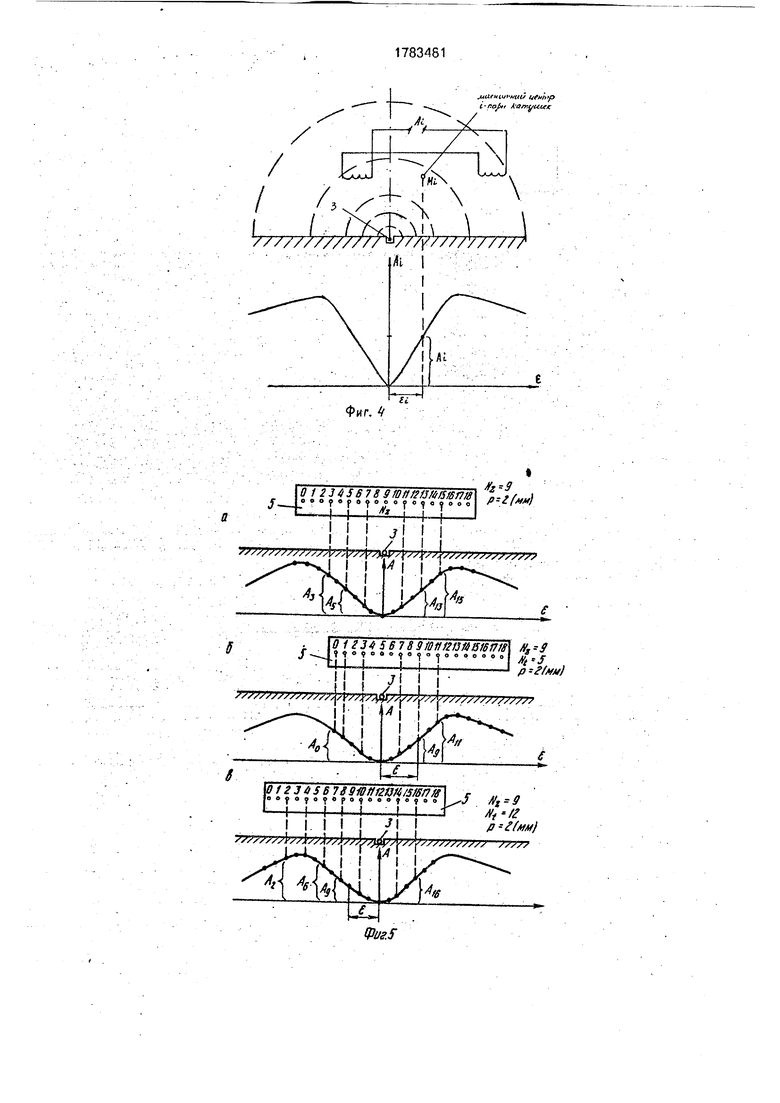
В каждой паре дифференциально включенных катушек наводится ЭДС, амплитуда
Ь которой зависит от величины смещения магнитного центра Mi этой пары относительно токонесущего провода 3 (фиг. 4)
Так как индукционный датчик 5 выполнен таким образом, что магнитные центры
0 пар катушек располагаются последовательно друг за другом, совокупность значений амплитуд ЭДС, наводимых в парах катушек, в любой момент времени воспроизводит статическую характеристику отдельно взя5 той пары катушек, т.е. характеристику, показанную на фиг. 4.
Это свойство положено в основу определения величины отклонения ТС от заданной траектории движения.
0 Один из магнитных центров индукционного датчика 5 (центральный) выбирается в качестве опорного. В том случае, когда он находится непосредственно над токонесущим проводом 3 или смещен относительно
него на расстояние, не превышающее ё,
отклонение ТС от заданной траектории считается равным нулю (фиг. 5а).
Это расстояние распознается по следу- 0 ющем условию:
, ,1k-1(1)
где Az - амплитуда ЭДС, наводимая в паре катушек, магнитный центр которой принят за опорный;
5 AI - амплитуда ЭДС, наводимая в 1-й паре катушек.
Пусть под действием возмущений ТС сместилось вправо относительно токонесущего провода 3 (фиг. 56) В этом случае спра- 0 ведливо выражение
, ,1k-1, ,«.(2)
где At - амплитуда ЭДС, наводимая в паре катушек, магнитный центр которой расположен над токонесущим проводом или сме- 5 щен относительно него на расстояние, не превышающее р/2.
Тогда отклонение ТС от заданной траектории движения вычисляется по формуле
е (Nz-Nt) INz-Nt l-pip/2,(3)
0 где Nz - номер опорной (центральной) пары катушек;
Nt - номер пары катушек, в которой амплитуда наводимой ЭДС минимальна.
Для примера, показанного на фиг. 56, 5е sign (9-5) I 9-5 I 2 (мм)
При смещении ТС в другую сторону отклонение определяется аналогично (фиг. 5в):
е- sign (9-12) 19-12 I-2i 1 (мм).
Таким образом, индукционный датчик 5 является датчиком дискретного принципа действия, так как осуществляется квантование аналогового сигнала по уровню. Условия (1), (2) будут выполняться не только тогда, когда магнитный центр пары катушек находится непосредственно над токонесущим проводом 3, но и когда он смещен на расстояние, не превышающее р/2. Отсюда становится понятным наличие статической ошибки р/2 в формуле (3).
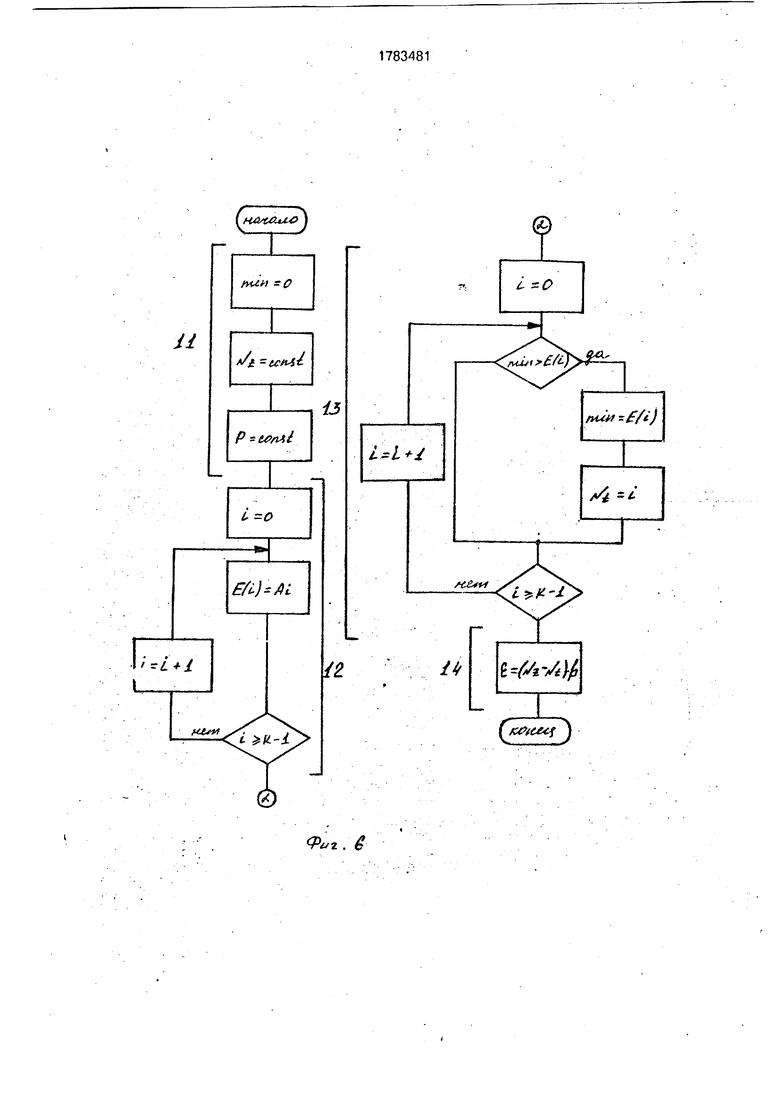
На фиг. 6 приведена схема алгоритма определения величины отклонения ТС от за- , данной траектории движения: 1 - блок начальной установки; 12 - блок опроса пар катушек индукционного датчика 5; 13 - блок нахождения номера пары катушек, наводимая ЭДС в которой минимальна; 14 - блок вычисления отклонения.
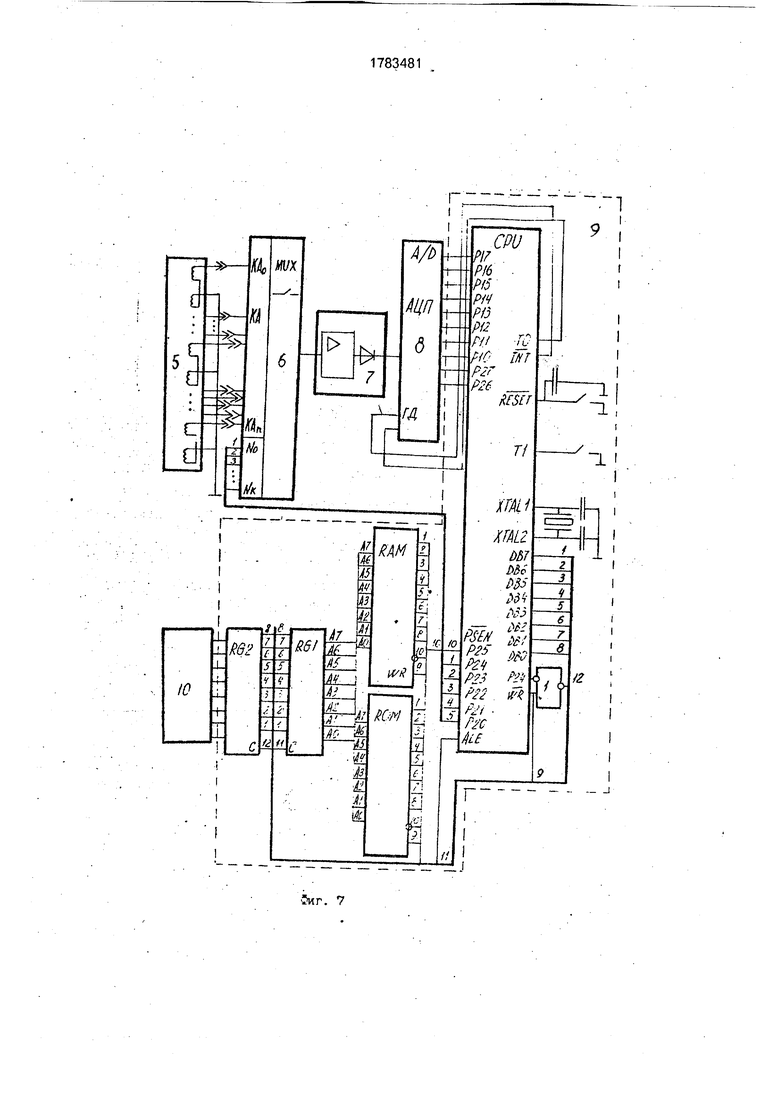
Техническая реализация предложение- го устройства для автоматического управления движением транспортного средства показана на фиг. 7.
Вычислительный блок 9 построен на базе однокристальной микроЭВМ (ОЭВМ) се- рии К1816 со схемами расширения внешней памяти. В его состав входят ОЭВМ, ОЗУ, ПЗУ, регистр адреса памяти RG1, выходной порт RQ2. Шесть разрядов порта Р2 ОЭВМ используются для управления аналоговым коммутатором 6, а порт Р1 и два старших разряда Р2 -для считывания цифрового кода с АЦП.
С помощью регистра RG1 организуется обмен информацией между памятью и одно- кристальной ЭВМ. Регистр RG2 предназначен для временного хранения управляющего воздействия на сервопривод 10.
Конструктивно блок б может быть вы- полней на базе интегральных аналоговых коммутаторов, например К591КНЗ. Данная микросхема обеспечивает коммутацию шестнадцати аналоговых каналов.
Для построения коммутатора на боль- шее число коммутируемых каналов бг.ок 6 должен быть построен по функциональной схеме, приведенной на фиг. 14.
Входные каналы аналогового коммута- тора образуют потенциальные выходы дифференциально включенных пар катушек индукционного датчика 5. Управляющий код поступает с порта Р2 вычислительного блока 9. Выход аналогового коммутатора со- единен с входом усилительно-преобразующего блока 7.
Общее количество корпусов интегральных коммутаторов определяется по формуле
m тг
М К
где М - общее число коммутируемых каналов;
К- количество каналов, коммутируемых одной микросхемой.
Причем частное округляется до большого целого. Для выбора аналогового канала вычислительный блок 9 формирует управляющий код длиной Nn бит. Младшие разряды этого кода подключены к управляющим входам (УВ) всех интегральных коммутаторов, а старшие р разрядов подаются на вход дешифратора ДШ, выходы которого соединены с входами V аналоговых коммутаторов
С помощью старших разрядов осуществляется выбор соответствующего аналогового коммутатора, а младшие п бит управляющего кода определяют один из каналов выбранного аналогового коммутатора.
Значения р и п определяются по формулам
P log2m.
гНодаК.
На фиг. 15 приведен пример реализации 32-канального коммутатора, выполненного на микросхемах К591КНЗ.
Для определения величины отклонения ТС от заданной траектории движения ОЭВМ последовательно через порт Р2 выдает коды коммутации на управляющие входы No, N1Nk-1 аналогового коммутатора
б, перебирая при этом цифровые комбинации, количество которых равно числу плр дифференциально включенных катушек индукционного датчика 5, а десятичное представление каждой цифровой комбинации есть номер коммутируемой пары катушек Этот номер должен соответствовать номеру магнитного центра пары катушек. В свою очередь, магнитные центры нумеруются последовательно целыми числами От 0 до К-1.
Например, появление на управляющих входах аналогового коммутатора 6 кода 00101 должно привести к коммутации пары катушек, номер магнитного центра которой равен 5.
После каждой коммутации сигнал, снимаемый с соответствующей пары катушек, усиливается и выпрямляется в усилительно- выпрямительном блоке и подается на формационный вход аналого-цифрового преобразователя 8. Далее ОЭВМ через выход ТО осуществляет его запуск. После окончания преобразования аналогового сигнала в код аналого-цифровой преобразователь 8 формирует сигнал Готовность данных, который поступает на вход запроса прерызаний ОЭВМ ffi. Программа обслуживания прерывания состоит в считывании через порт Р1 и два разряда Р2 цифрового кода и пересылке его для временного хранения в ОЗУ.
Таким образом, после реализации блоком 12 алгоритма определения величины отклонения ТС от заданной траектории движения (фиг, 6) будет сформирован массив чисел Ј(1), ,1,2 К-1, каждый элемент которого является цифровым представлением амплитуды ЭДС, наводимой в паре катушек. Затем выполняется выбор минимального элемента этого массива (блок 13). Он может быть реализован различными способами. В данном случае осуществляется последовательный перебор элементов массива, сравнение каждого элемента с текущим минимумом, формирование нового значения текущего минимума и запоминание его номера. После окончания цикла по I значение Nt будет равно номеру пары катушек, магнитный центр которой находится над токонесущим проводом 3,
Далее происходит вычисление отклонения ТС от заданной траектории движения по формуле (3). Причем величины р. К и Nz задаются заранее в блоке 11 и являются константами.
Информация об отклонении используется для вычисления управляющего воздействия на сервопривод 10, которое формируется таким образом, чтобы ТС возвращалось на заданную траекторию движения, т.е. желаемый закон изменения управляемой величины имеет вид е (t)0. Кроме того, предложенный индукционный датчик дополнительно к основным своим функциям позволяет проводить декодирование технологического оборудования, если его кодирование осуществляется последовательным кодбм, уложенным токонесущим проводом в виде последовательности П-об- разных петель (авт. св. СССР № 767710, кл. G 05 D 1/02. Так как устройство для управления движением ТС обеспечивает движение по заданной траектории, то минимальная амплитуда ЭДС будет наводиться или в центральной паре катушек (Nz). или в близлежащих парах, Появление П-об- разной петли на трассе приведет к резкому изменению величины Nt, которое идентифи- руется как один разряд кода. После прохождения всех П-образных петель последовательный код будет считан.
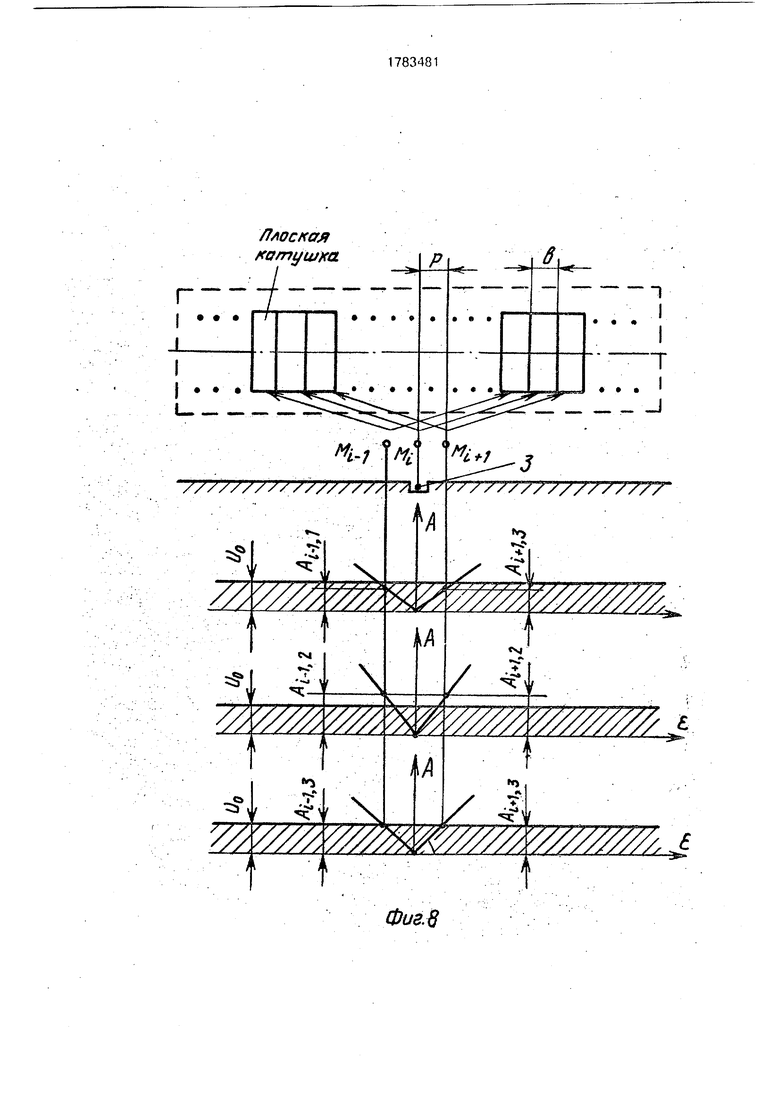
Из формулы (3) следует, что статическая ошибка определения величины е зависит от шага установки магнитных центров р, который, в свою очередь, определяется толщиной плоской катушки вблизи нуля (фиг, 8).
Так как первое вытекает из того, что величина р не может быть меньше величны Ь, следует остановиться более подробно на втором моменте.
Поскольку порог чувствительности U0
аналого-цифрового преобразователя является конечной величиной, цифровое представление амплитуд AI-U, An.Aj+1. i в отличие от цифрового представления амплитуд Аы.г,
А|,г, Aj-н.г будет одинаковым (фиг. 8), Поэтому определить номер магнитного центра пары катушек, в которой амплитуда наводимой ЭДС минимальна, не представляется возможным. В связи с этим наклон статической
характеристики пары катушек вблизи должен выбираться из условия
tg
а
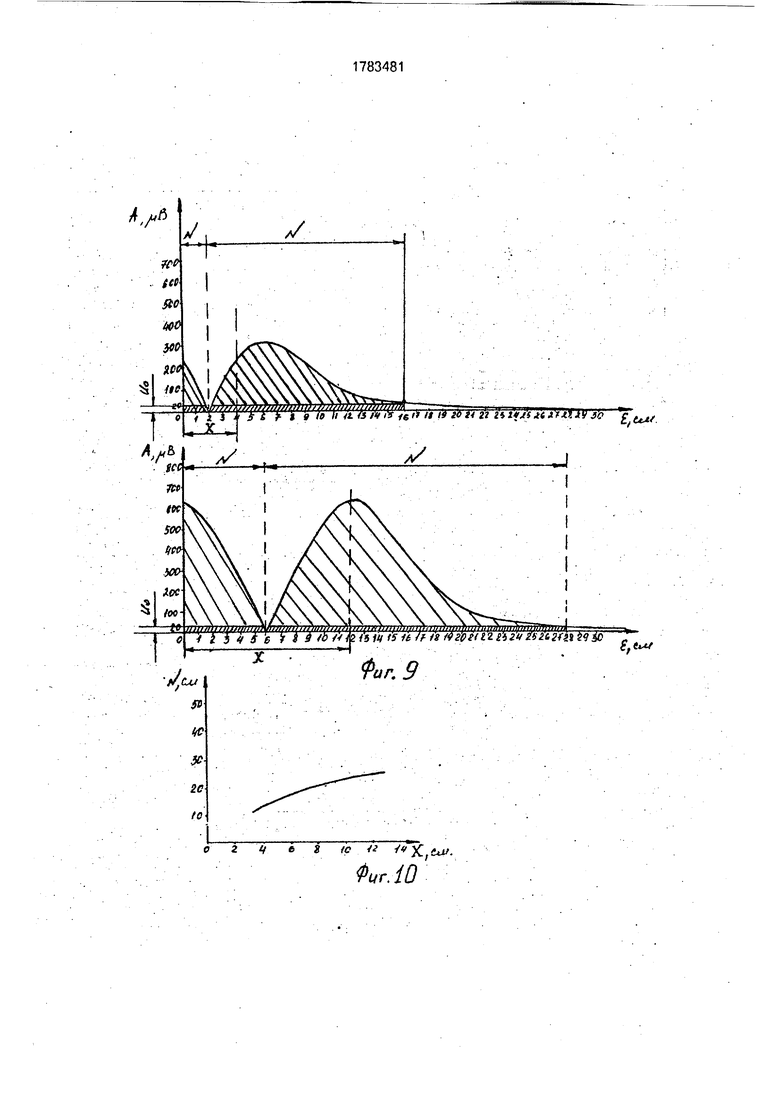
Диапазон измерения N индукционного
датчика 5 зависит от расстояния х между катушками в дифференциально включенной паре.
На фиг. 9 показаны статические характеристики пары катушек, при различных величинах х и фиксированном U0. Диапазон измерения N определяется графически. Если величина отклонения ТС от трассы будет больше N, то из-за конечного значения порога чувствительности 1)0 определить номер
пары, амплитуда наводимой ЭДС в которой минимэльна,не удастся, так как таких пар будет несколько.
Из зависимости N(x), приведенной на фиг, 10, следует, что с увеличенном расстояния между катушками в дифференциально включенной паре диапазон измерения индукционного датчика увеличивается.
С помощью индуктивного датчика 5 можно осуществить декодирование технологического оборудования.
По маршруту движения, т.е. в местах его позиционирования, с помощью токонесущего провода 3 симметрично относительно центра точного останова, находящегося на
пересечении оси точного позиционирования и токонесущего провода 3, в противопо- ложные стороны друг от друга укладываются П-образные петли амплитудно-фазового датчика, последовательно кодирующие два разряда кода причала в J-системе счисления (см. фиг. 11).
Выбор системы счисления для кодирования обслуживаемого транспортным сред- ством оборудования определяется
количеством пар дифференциально включенных катушек в индукционном датчике 5. Эти пары катуше конструктивно должны быть установлены так, чтобы их магнитные центры располагались последовательно
друг за другом и отстояли на расстояние, величина которого равна погрешности измерения отклонения ТС от токонесущего провода 3. Например, индукционный датчик 5 состоит из одиннадцати пар дифференциально включенных катушек (см, фиг. 11). Если магнитный центр центральной пары катушек обозначить через 0, а остальные магнитные центры пронумеровать в обе стороны и считать, что при движении ТС вдоль токонесущего провода движение происходит без отклонения, а магнитный центр центральной пары катушек совпадает с траекторией движения ТС, то в таком случае при последовательном считывании информации с датчика 5 в момент времени, когда индукционный датчик 5 располагается сначала над одной П-образной петлей, кодирующей старшую цифру, а затем над другой П-образной петлей, кодирующей младшую цифру кода причала, можно определить код причала, закодированный П-образными петлями амплитудно-фазового датчика. Количество оборудования, которое можно распознать при таком способе кодирования, зависит от количества магнитных центров, расположенных в обе стороны от центра 0. При данной конструкции датчика максимальный код причала можно получить, если П-образная петля, кодирующая старшую цифру причала, охватывает пять магнитных центров, не считая центральной, а П-образная петля, кодирующая младшую цифру кода причала, - такое же количество магнитных центров, расположенных противоположной стороны от центрального в индукционном датчике 5. В этом случае код причала будет равен
61+ 5/ 6° 36+ 5 41, где 5 в первом слагаемом - старший коэффициент кода причала;
5во втором слагаемом - младшая цифра кода причала;
6- основание системы счисления .
При этом количество магнитных центров индукционного датчика 5, охватываемых последовательно петлями, кодирующими максимальный код причала, считая центральный магнитный центр, определяет основание системы счисления J, в которой будет определяться код причала, а их количество, не считая центрального магнитного центра,соответственно определяет старшую и младшую цифру кода причала. Очевидно, что при обслуживании транспортным средством большого количества оборудования, необходимо изменить конструкцию индукционного датчика 5, и автоматически пои этом изменится основание системы счисления, в которой будет определяться код причала. Напримеп, если индукционный датчик 5 будет содержать девятнадцать пар дифференциально включенных катушек, то максимальное ко- 5 личество обслуживаемого оборудования при этом будет равно
101 9 10° 99. Однако для обеспечения точного определения отклонения от токонесущего провода 3
0 с погрешностью определения отклонения, равной 1 мм, индукционный датчик 5 должен конструктивно выполняться так, чтобы магнитные центры пар дифференциально включенных катушек отстояли друг от друга
5 на 2 мм или при этом задавались максимальным отклонением ТС от трассы в ту или другую сторону, например, равную 15 мм,
Конструкция индукционного датчика 5 при этом должна содержать такое количест0 во пар дифференциально включенных катушек, чтобы при максимальном отклонении от токонесущего провода 3 в местах кодирования причалом при системе счисления J самые крайние магнитные центры индукци5 онного датчика 5 находились над П-образными петлями амплитудно-фазового датчика максимального кода причала. При такой конструкции индукционного датчика 5 с учетом максимального отклонения можно
0 определить любой код причала из 1п при
движении ТС вдоль провода 3. Уже для определения максимального отклонения ТС от токонесущего провода 3, равного 15 мм, с погрешностью в 1 мм индукционный датчик
5 содержит 30 пар дифференциально включенных катушек, а это значит, что согласно предложенной системе кодирования можно закодировать с учетом максимального отклонения
0 81+7
единиц оборудования, обслуживаемого транспортным средством. В тех случаях, когда количество обслуживаемого оборудования невелико, можно повысить достовер5 ность считываемой информации путем того, что m магнитных центров индукционного датчика 5 считать за единицу, а количество таких единиц, охватываемых П-образными петлями амплитудно-фазового датчика, оп0 ределяет код причала В этом случае число п в рассмотренном выше примере если считать, что , будет равно 41+31- (см. фиг. 12),
Как видно из рассмотренных примеров
5 изменения конструкции индуктивности датчика 5, можно добиться требуемой точности отклонения ТС от траектории движения, а при наличии в датчике большого количества пар катушек, включенных дифференциально, определившись количеством магнитных
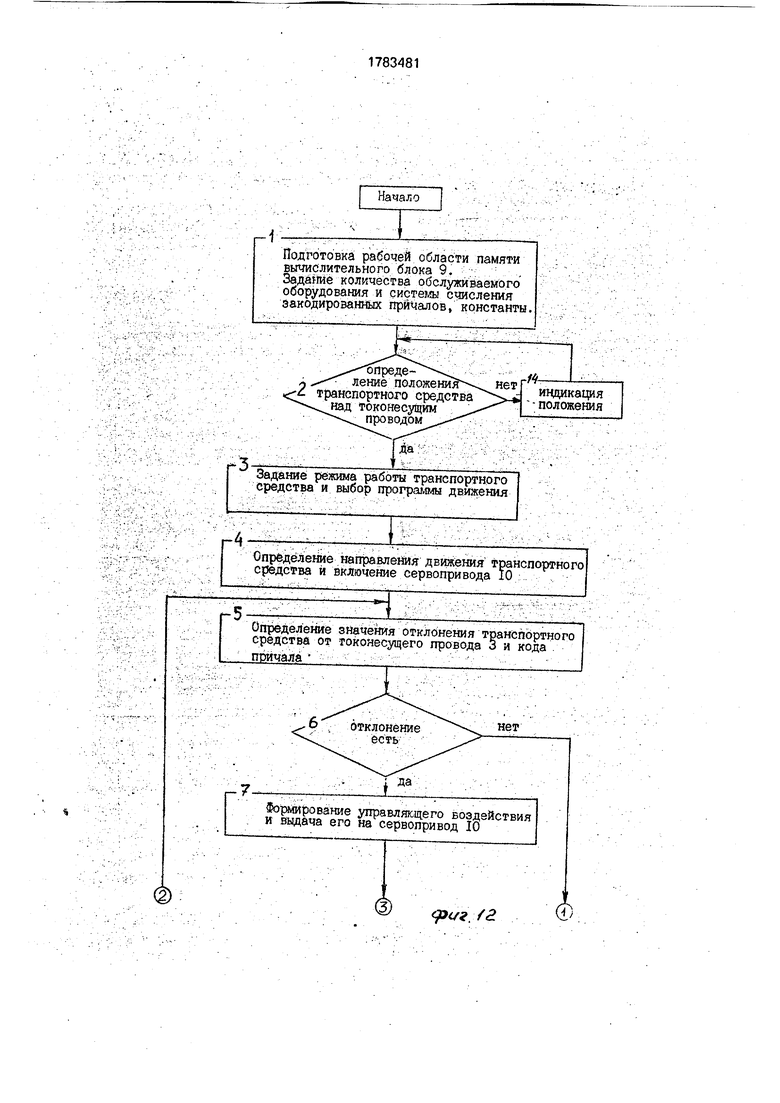
центров т, приходящихся на единицу, определяющую код причала, можно повысить достоверность информации, считываемой с индукционного датчика 5 при наличии рыскания ТС при движении, Рассмотрим общий алгоритм работы вычислительного блока 9. позволяющий решать все задачи, возникающие в процессе управления транспортным средством. Формирователь кодов 9 для решения задач управления в данном случае может быть построен на базе микроЭВМ.В рассматриваемом случае формирователь кодов 9 реализован на базе однокристальной микроЭВМ (ОЭВМ) К1816 со схемами расширения памяти (см, фиг. 7).
Память ЭВМ состоит из ПЗУ и ОЗУ. В ПЗУ хранятся некоторые константы, необходимое для решения задач управления, а также алгоритм работы вычислительного блока 9. ОЗУ предназначено для хранения текущей информации, необходимой для вычисления в процессе управления транспор- тным средством. Алгоритм работы вычислительного блока 9 представлен на фиг. 13.
При запуске системы управления транспортным средством формирователем команд 9 выходят на программу, которая подготавливает необходимые области памяти, считывает из ПЗУ константы, опреде- ляющее количество обслуживаемого транспортным средством оборудования, константу, определующую основание системы счисления - J, в которой закодированы причалы, а также значение константы m и т.д. После этого начинает выполняться программа определения положения транспортного средства над токонесущим проводом 3, выход из которой произойдет только в том случае, если ТС окажется над токонесущим проводом 3. После определения режима работы ТС начинает выполняться программа соответствующего режима. В этой программе определяется направление движения ТС и формируется управляющее воздействие на сервопривод 10, вырабатываемое в ОЭВМ и выдаваемое через ее двунаправленный порт ДВ в регистр RG 2 (см. фиг, 7). ТС начинает двигаться в сторону первого обслуживаемого причала, а формирователь команд 9 переходит на программу определения значения отклонения его от токонесущего провода 3.
. При этом ОЭВМ последовательно через порт Р2 выдает коды коммутации на управ- ляющие входы аналогового коммутатора-6, перебирая при этом цифровые комбинации, количество которых равно числу пар дифференциально включенных катушек в индукционном датчике 5. После каждой
коммутации аналогового коммутатора 6 сигнал, снимаемый с пары катушек индукционного датчика 5, усиливается в усилительно-выпрямительном блоке 7. подается на информационный вход аналого- цифрового преобразователя 8, под управлением ОЭВМ в АЦП аналоговый сигнал преобразуется в цифровой код, а затем каждый раз считывается ОЭВМ по сигналу Конец преобразования, вызывающему прерывание программы, В программе прерывания осуществляется считывание кода с выхода аналого-цифрового преобразователя 8 через порт Р1 и Р2 (используются только разряды Р27, Р26), е оперативную память вычислительного блока 9. После завершения цикла коммутации всех пар катушек индукционного датчика 5 среди сформированного в ОЗУ массива цифровых кодов определяется минимальный цифровой код и его порядковый номер, который в данном случае соответствует номеру той пары катушек, между которыми находится то- конесущий провод 3. Располагая информацией о порядковом номере центральной пары катушек и текущем порядковом номере той пары катушек, между которыми в данный момент находится токонесущий провод 3, зная расстояние между магнитными центрами пар катушек в индукционном датчике 5, можно определить знак и отклонение транспортного средства от токонесущего провода 3:
е sign(Nz-Nt) }-p, где Е - отклонение ТС от токонесущего провода 3 со знаком;
Nt - номер пары катушек индукционного датчика 5 в текущий момент времени;
NZ - номер центральной пары катушек;
р- расстояние между магнитными центрами соседних пар катушек,
На фиг. 12 показан момент положения индукционного датчика 5 над токонесущим проводом 3. Величина отклонения ТС в этом случае будет равна
Ј sign(15-22) - 15-22/ мм.
При наличии отклонения по его знаку и величине формируется код управляющего воздействия на сервопривод 10, который выдается ОЭВМ через ее двунаправленный порт ДВ в регистр RG 2,
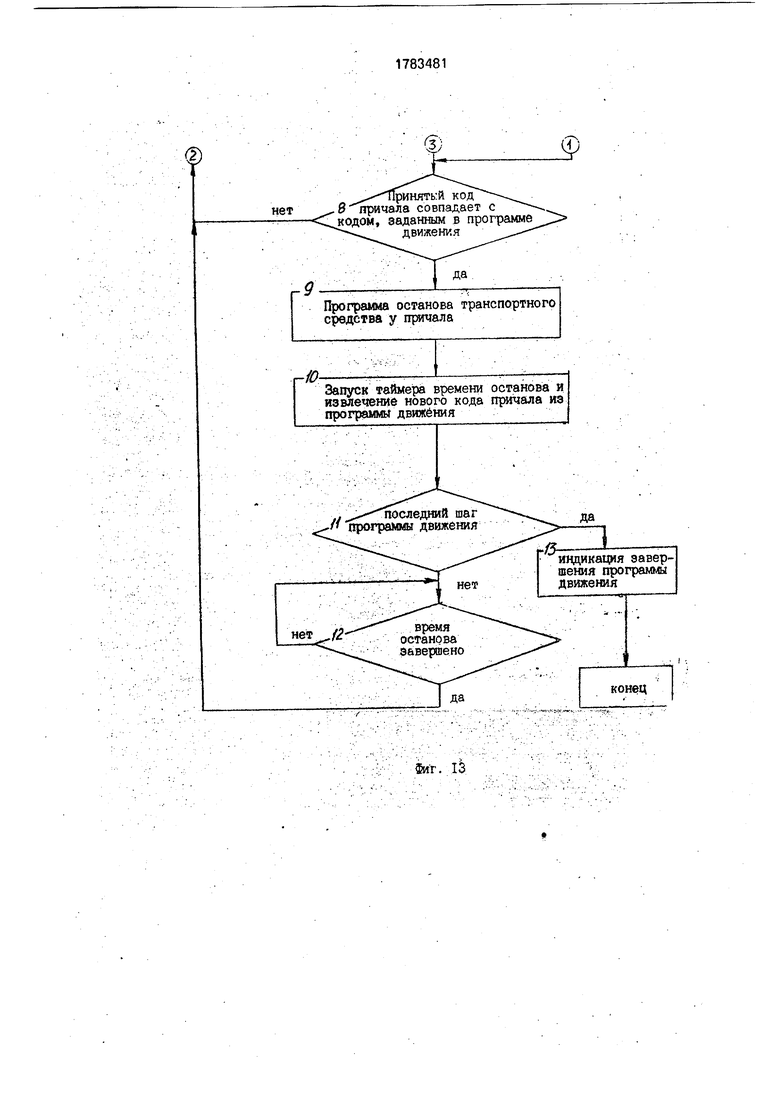
Но прежде чем сформировать управляющее воздействие, полученное отклонение сравнивается с отклонением, рассчитанным на предыдущем опросе индукционного датчика 5. При этом берется разность между текущим и предыдущим отклонениями. По величине этой разности определяется, действительно ли текущее отклонение - это отклонение ТС от токонесущего провода, либо это отклонение связано с расположением индукционного датчика 5 над П-образной петлей амплитудно-фазового датчика. Если величина разности превышает заранее определенную константу, то считается, что это отклонение связано с появлением П-образной петли амплитудно-фазового датчика; в этом случае величина отклонения пересчитывается и определяется как разность номеров пар катушек индукционного датчика 5, определяющих положение токонесущего провода 3 в данный момент времени и предыдущий. По знаку этой разности определяется старшая или младшая цифра кода причала при данном опросе индукционного датчика 5, а величина разности, деленная на константу m и округленная до целого значения, определяет цифру кода причала, значение которой заполняется. Если знак полученной разности отрицателен, это соответствует тому, что код причала закодирован двумя петлями амплитудно-фазового датчика. Далее программа учитывает размер П-образной петли и продолжает ликвидировать отклонение ТС без учета величины, обусловленной появлением П-образной петли. Такая коррекция отклонения продолжается до момента, определяющего сход индукционного датчика 5 с П-образной петли. Затем отклонение рассчитывается так же, как до появления на трассе П-образной петли амплитудно-фазового датчика; кроме того, анализируется признак, определяющий количество цифр, кодирующих текущий код причала. В том случае, если количество полученных значений цифр кода причала совпадает с признаком, определяется значение текущего кода причала:
- Ј1 J1 + -Јoj°, если slgn(ei)-1;
т
т
Јо -J°,
в противном случае,
где значение - Ј1, - Ј0 округляется до целого значения;
п - код причала;
J - основание системы счисления;
m - константа;
Ј1,Јо - отклонения, обусловленные появлением на трассе П-образных петель амплитудно-фазового датчика, кодирующих старшую и младшую цифру кода причала соответственно и вычисляемых по формулам
Ј1 Nti-Npi и fо Nto-Npo,
где NH, Nto - номера пар ка.ушек индукционного датчика 5, регистрирующих появление на трассе петель, задающих старшую и младшую цифры кода причала соответст- 5 венно;
Npi, Npo - номера пар катушек индукционного датчика 5, регистрирующих трассу движения ТС (см. фиг. 12).
Определив код причала, его величину
0 сравнивают с величиной, заданной в программе движения, и при их совпадении управление передается программе останова ТС у причала, в противном случае выполняется программа, осуществляющая проезд
5 ТС над П-образными петлями второй половины амплитудно-фазового датчика, после чего передается управление на блок 5 общего алгоритма (см. фиг. 13).
В программе останова ТС у причала осу0 ществляется снижение скорости ТС, и при обнаружении схода индукционного датчика 5 с П-образной петли формируется управляющее воздействие на останов. По завершении останова запускается таймер времени
5 останова и подготавливается к выполнению следующий шаг программы движения, При обнаружении последнего шага после завершения времени останова завершается выполнение программы, а в противной случае
0 работы программы возобновляется.
Благодаря такой схеме устройства для управления движением ТС расширяются функциональные возможности устройства управления и упрощается техническая реа5 лизация подсистемы декодирования оборудования и точного останова. Расширение функциональных возможностей устройства связано с использованием индукционного датчика в качестве датчика, определяющего
0 отклонения ТС от траектории, а также позволяющего определять код причала и осуществлять точный останов ТС. Многофункциональное назначение индукционного датчика позволяет упростить тех5 ническую реализацию устройства для управления движением транспортного средства, при этом при создании системы используются стандартные модули сопряжения информационных каналов датчика с
0 вычислительным устройством. Кроме того, устройство позволяет повысить точность измерения отклонения ТС от-трассы, причем точность зависит от конструктивных особенностей изготовления датчика, а инфор5 мационный сигнал об отклонении получают в цифровом виде. Благодаря дифференциальному включению катушек их выходной сигнал в момент расположения 1-й пары катушек над токонесущим проводом не зависит от вертикального перемещения ТС,
связанного с неровностями местности, по которой оно перемещается: таким образом, исключается дополнительная ошибка при определении отклонения транспорта от трассы. Использование предложенных конструкций амплитудно-фазового датчика позволяет осуществлять кодирование и декодирование обслуживаемого оборудования, причем кодирование приводится в любой выбранной J-системе счисления. Кроме того, сохраняется высокая помехоустойчивость за счет применения цифрового кодирования.
Формула изобретения Устройство для управления движением транспортного средства, содержащее индукционный датчик, установленный на транспортном средстве с возможностью взаимодействия с токонесущим проводом, .подключенным к генератору переменного тока, уложенным на местности в соответствии с заданной траекторией движения транспортного средства, аналого-цифровой преобразователь, информационный вход которого соединен с ёыходом усилительно- выпрямительного блока, а выход - с входом формирователя команд, первый выход которого связан с входом сервопривода, и амплитудно-фазовые датчики, расположенные в местах причала транспортного средства и образованные токонесущим проводом, о т- личающееся тем, что, с целью упрощения и расширения области применения устройства за счет обеспечения возможности транспортного средства в случаях с адресацией его останова, оно содержит коммута0
5
0
5
0
5
тор, а индукционный датчик выполнен в виде К пар соосно расположенных катушек, включенных попарно дифференциально, магнитные центры которых расположены в плоскости, поперечной токонесущему проводу, последовательно друг за другом, причем у одной из пар катушек, являющейся центральной, магнитный центр расположен над токонесущим проводом, выходы пар катушек подключены к соответствующим информационным входом коммутатора, выход которого соединен с входом усилительно- выпрямительного блока, при этом управляющий вход коммутатора соединен с вторым выходом формирователя команд, третий,выход которого связан с входом запуска аналого-цифрового преобразователя, П-образные петли амплитудно-фазового датчика, последовательно кодирующие два разряда кода причала в J-системе счисления расположены по нормали в протиповоложные стороны от траектории движения транспортного средства, уложены на местности симметрично относительно центра точного останова, находящегося на пересечении оси точного позиционирования и заданной траектории движения, размер каждой петли по нормали к токонесущему проводу равен произведению расстояния между двумя соседними магнитными центрами индукционного датчика на значение разряда кода причала в j-системе счисления, которое равно количеству магнитных центров, охватываемых петлей при расположении над ней индукционного датчика симметрично относительно магнитного центра центральной пары катушек,


| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| ИНДУКТИВНЫЙ ФАЗОВЫЙ ДАТЧИК ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2079842C1 |
| Система управления движением транспортного средства | 1984 |
|
SU1177800A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ТРАЕКТОРИИ САЛШХОДНОЙ МАШИНЫ | 1969 |
|
SU235437A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Способ определения отклонения транспортного средства от заданной траектории | 1985 |
|
SU1332268A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| Устройство для определения положения транспортного средства | 1986 |
|
SU1343393A1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 1997 |
|
RU2113016C1 |

Изобретение относится к автоматическому управлению движением транспортных средств вдоль заданного токонесущим проводом направления и может быть использовано, например, в машиностроительной промышленности для управления мобильным роботом, эксплуатируемым при больших неровностях пола, в системах с адресацией рабочих мест. Цель изобретения - упрощение и расширение области применения устройства за счет обеспечения возмож- ности использования транспортного средства в случаях с адресацией его останова. Для этого в устройство, содержащее ин- дукционный датчик, установленный на транспортном средстве, генератор переменного тока, подключенный к токонесущему проводу, аналого-цифровой преобразователь, усилительно-выпрямительный блок, формирователь команд, сервопривод, амплитудно-фазовые датчики, введен коммутатор, индукционный датчик выполнен в виде К пар соосно расположенных катушек, включенных попарно дифференциально, а П-образные петли амплитудно-фазового датчика расположены по нормали в противоположные стороны от траектории движения транспортного средства и уложены на местности симметрично относительно центра точного останова, находящегося на пересечении оси точного позиционирования и заданной траектории движения. 15 ил. Я со 00
«иг. I
со «т гэ со г«5
| I
S 6 6 |«
§ &
« хЖ
У
45
л SSS
fTt
S
I
О 66
4
CJO
т n oo hи
Р«г. в
{f&fteti}
HI 4
/7К/Г
I Т
п:
TL
I
L
18ИЖ1
Фиг. в
V
S
X. uiyHyiiuirfiiiaivii/Ht/iiiiiJuiiit/i/iin/fiHfiiifuiifiiiifTjfnnfiiuiifiHiimHHiifiiiiuiiiiiiwС 1 I 3 i 6 t i 4 rtft&fSWt5J6Sffitfe&t{l2n2 №t2fi9&#r
q2
f/fCM
fC
W & 2C
to
о г tf я г tc к ,eu/.
Фцг.И)
2 t«js лб гглгл зъЈ bjt
fSWt5J6Sffitfe&t{l2n2 №t2fi9&#r
Фиг. 9
СО Т
о
00
гSsSU
54tl
%ч|
lit.
Подготовка рабочей области памяти вычислительного блока 9. Задание количества обслуживаемого оборудования и системы счисления Закодированных причалов, константы,
гЗ
Задание режима работы транспортного средства и выбор программы движения
Определение направления движения транспортного средства и включение сервопривода 10
г5
Определение значения отклонения транспортного средства от токонесущего провода 3 и кода
причала;
Формирование управляющего воздействия и выдача его на сервопривод 10
р«г. /2
(ft
®
нет
Программа останова транспортного средства у причала
r-iOЗапуск таймера времени останова и извлечение нового кода причала из программы движения
Лринять:й код .В причала совпадает с кодом, заданным в программе
движения
Фиг. 1$
Оиг. 14
К индукционному датчику о
1783481
К блоку
$ИГ. 15
| Авторское свидетельство СССР Ы° | |||
| Способ определения отклонения транспортного средства от заданной траектории | 1985 |
|
SU1332268A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР N; 1524714, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
