11
Изобретение относится к электротехнике, а именно к электроприводам постоянного тока с, подчиненным регулированием параметров, и может найти применение в электроприводах механиз мов, требующих высокой жёсткости механических характеристик и малого динамического отклонения скорости при приложении и снятии статической нагрузки.
Цель изобретения - увеличение быстродействия и уменьшение динамического отклонения скорости при приложении и снятии нагрузки.
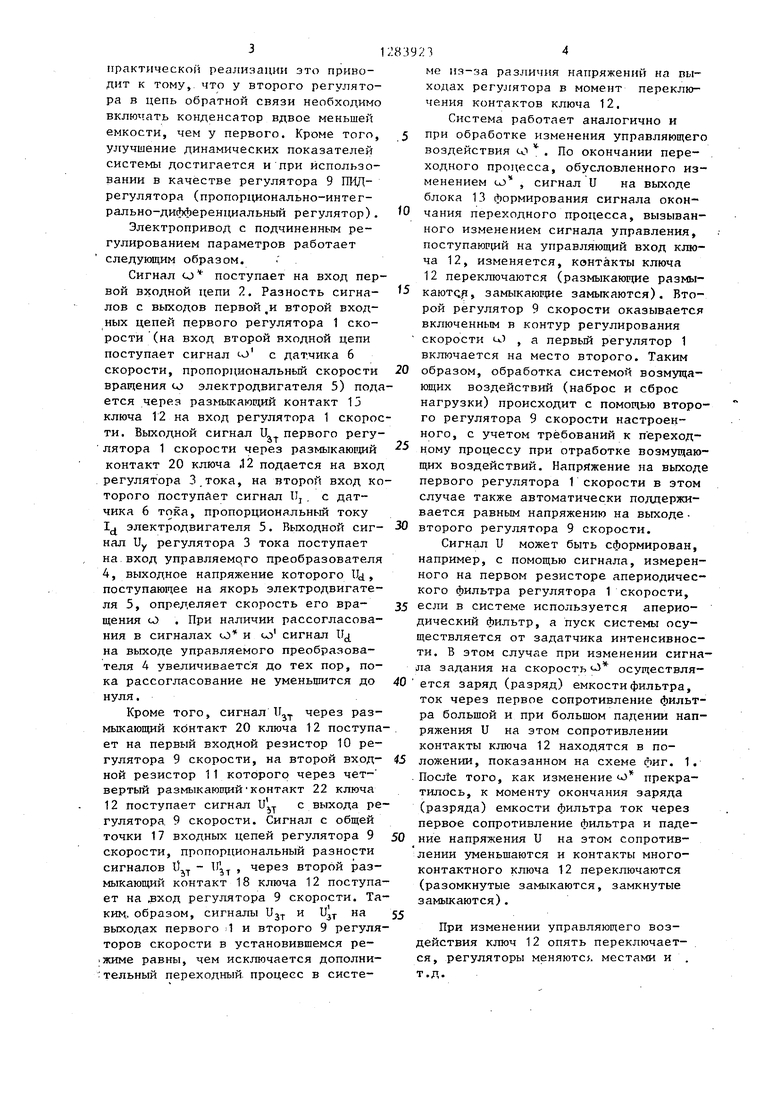
На фиг. 1 изображена функциональ- лая схема электропривода постоянного VroKa; на фиг. 2 - блок формирования сигнала окончания переходного про- цесса по управлению.
Электропривод постоянного тока с подчиненным регулированием параметров содержит последовательно соединенные пропорционально-интегральный регулятор 1 скорости с первым входным резистором 2, регулятор 3 тока, управляемый преобразователь 4 и электродвигатель 5 постоянного тока, а также датчик 6 тока, выход которого подключен к входу регулятора 3
тока, и датчик 7 скорости, выход которого подключен к второму входному резистору 8 регулятора 1 скорости. Кроме того, электропривод содержит второй регулятор 9 скорости с входными резисторами 10 и 11 и постоян- ной интегрирования в два раза меньше чем постоянная интегрирования первого регулятора 1 скорости, управляемы многоконтактный ключ 12 и блок 13 формирования сигнала окончания переходного процесса по управлению, выход которого подключен к управляющему входу упомянутого ключа 12, при этом общая точка 14 входных цепей регулятора 1 скорости подключена че- рез размыкающий контакт 15 ключа 12 к входу регулятора 1 скорости и через замыкающий контакт 16 ключа 12 к входу регулятора 9 скорости, общая точка 17 входных резисторов 10, 11 регулятора 9 скорости подключена через размыкающий контакт 18 ключа 12 к входу регулятора 9 скорости и через замыкающий контакт 19 - к входу регулятора 1 скорости, выход регуля- тора 1 скорости через третий размыкающий контакт 20 ключа 12 подключен к входу регулятора 3 тока и к вход
9
0
5
0
5
0
5 0 5
ному резистору К) регулятора 9 скорости, а через третий замыкающий контакт 21 - к входному резистору 1 1 регулятора 9 скорости, выход регулятора 9 скорости через четвертый размыкающий контакт 22 ключа 12 подключен к входному резистору 11 регулятора 9 скорости и через четвертый замыкающий контакт 23 ключа 12 - к входу регулятора 3 тока.
При использовании апериодического входного фильтра (фиг. 2), в качестве первого входного резистора 2 регулятора 1 скорости и пуске электропривода от задатчика интенсивности управляюд1щй вход управляемого ключа 12 может быть подключен к первому резистору апериодического фильтра (фиг. 2), т.е. блоком 13 формирования сигнала окончания переходного процесса по управлению может служить входной резистор апериодического фильтра.
Параметры первого регулятора 1 скорости выбираются из условия требуемого качества переходного процесса то скорости при изменении управляющего воздействия.Например,при настройке системы на симметричный оптимум параметры первого регулятора расчитываются на основании передаточной функции
w V - IcibCe ),
., p
где T,, Т„ - электромеханическая и
некомпенсируемая постоянные времени объекта; К - коэффициент передачи
контура тока;
Ce,R - параметры двигателя. Параметры и структура второго регулятора 9 скорости зыбираются из условия требуемого качества переходного процесса при обработке возмущающих воздействий (например, при приложении и снятии статического момента нагрузки)..
Проведенные исследования свидетельствуют, что минимальное динамическое отклонение скорости и минимальное время ее восстановления после приложения и снятия на-грузки дос- достигается, если второй регулятор 9 выбирается пропорционально-интегральным с тем же коэффициентом усиления пропорциональной части, но с вдвое меньшей постоянной интегрирования, чем у первого регулятора. При
31
практической реализации это приводит к тому, что у второго регулятора в цепь обратной связи необходимо конденсатор вдвое меньшей емкости, чем у первого. Кроме того, улучшение динамических показателей системы достигается и при использовании в качестве регулятора 9 ПИД- регулятора (пропорционально-интег- рально-диЛференциальный регулятор).
Электропривод с подчиненным регулированием параметров работает следующим образом.
Сигнал CJ поступает на вход первой входной цепи 2. Разность сигна- лов с выходов первой ,и второй входных цепей первого регулятора 1 скорости (на вход второй входной цепи поступает сигнал о с датчика 6 скорости, пропорциональный скорости вращения со электродвигателя 5) подается через разг-гыкающий контакт 13 ключа 12 на вход регулятора 1 скорости. Выходной сигнал U, первого регулятора 1 скорости через размыкаюрд1й контакт 20 ключа ,12 подается на вход регулятора , на второй вход которого поступает сигнал Uj, с датчика 6 тока, пропорциональный току 1 электродвигателя 5. Выходной сиг- нал Uy регулятора 3 тока поступает на вход управляемцго преобразователя 4, выходное напряжение которого Щ, поступающее на якорь электродвигателя 5, определяет скорость его вра- щения О . При наличии рассогласования в сигналах о и to сигнал П на выходе управляемого преобразователя 4 увеличивается до тех пор, пока рассогласование не уменьшится до нуля.
Кроме того, сигнал и через размыкающий кбнтакт 20 ключа 12 поступа ет на первый входной резистор 10 регулятора 9 скорости, на второй вход- ной резистор 11 которого через чет- вертый размыкающий контакт 22 ключа 12 поступает сигнал U с выхода регулятора. 9 скорости. Сигнал с общей точки 17 входных цепей регулятора 9 скорости, пропорциональный разности сигналов 11, - и , через второй размыкающий контакт 18 ключа 12 поступает на зход регулятора 9 скорости. Таким, образом, сигналы Uj и на выходах первого l и второго 9 регуляторов скорости в установившемся ре- .жиме равны, чем исключается дополни- тельный переходный процесс в систе
234
ме из-за различия напряжений на выходах регулятора в момент переключения контактов ключа 12.
Система работает аналогично и при обработке изменения управляющего воздействия ю . По окончании переходного процесса, обусловленного изменением со , сигнал и на выходе блока 13 формирования сигнала окончания переходного процесса, вызыван- ного изменением сигнала управления, пocтyпaюп ий на управляющий вход ключа 12, изменяется, контакты ключа 12 переключаются (размыкающие размы- каютср, замыкаюрще замыкаются). Второй регулятор 9 скорости оказывается включенным в контур регулирования скорости U.5 J а первый регулятор 1 включается на место второго. Таким образом, обработка системой возмущающих воздействий (наброс и сброс нагрузки) происходит с помощью второго регулятора 9 скорости настроенного, с учетом требований к переходному процессу при отработке возмущающих воздействий. Напряжение на выход первого регулятора 1 скорости в этом случае также автоматически поддерживается равным напряжению на выходе второго регулятора 9 скорости.
Сигнал и может быть сформирован, например, с помощью сигнала, измеренного на первом резисторе апериодического фильтра регулятора 1 скорости, если в системе используется апериодический фильтр, а пуск системы осуществляется от задатчика интенсивности. В этом случае при изменении сигнала задания на скоростьcJ осуществляется заряд (разряд) емкости фильтра, ток через первое сопротивление фильтра большой и при большом падении напряжения и на этом сопротивлении контакты ключа 12 находятся в положении, показанном на схеме фиг. 1. . Ilocjte того, как изменение прекратилось, к моменту окончания заряда (разряда) емкости фильтра ток через первое сопротивление фильтра и падение напряжения U на этом сопротивлении уменьшаются и контакты многоконтактного ключа 12 переключаются (разомкнутые замыкаются, замкнутые замыкаются).
При изменении управляющего воздействия ключ 12 опять переключается, регуляторы меняются местами и . т.д.
Рассматриваемый электропривод при этом же качестве переходного про процесса вследствие изменения управляющего воздействия л имеет лучшие показатели скорости при изменении возмзтцающего воздействия (приложение и снятие момента нагрузки), Так, при приложении и снятии скачка статического момента динамическое от отклонение скорости в предлагаемой системе уменьшается на 20%, время восстановления скорости до заданного значения уменьшается на 50%. Эти показатели имеют место при использо
;вании в качестве второго регулятора 9 скорости пропорционально-интегрального регулятора, параметры которого выбраны согласно описанному вьгае с отступлением от симметричного оптимума.
Формула из
Ооб Р
е т е н и я
Электропривод постоянного тока с подчиненным регулированием параметров, содержащий последовательно соединенные пропорционально-интеграль- Hb%i регулятор скорости с двумя сое- диненлыми между собой входными резисторами, регулятор тока, управляемый преобразователь и электродвигатель постоянного тока, а также датчик тока, выход которого подключен к входу регулятора тока, и датчик скорости, выход которого подключен к вторрму входному резистору регулятора скорости, отличающийся тем, что, с целью увеличения быстродействия и уменьшения ди5 Ю f
839236
намического отклонения скорости при приложении и снятии нагрузки, в него введены второй регулятор скорости с двумя соединенными между собой входными резисторами и постоянной интегрирования, в два раза меньшей, чем постоянная интегрирования первого регулятора скорости, управляемый многоконтактный ключ и блок формирования сигнала окончания переходного процесса по управлению, выход которого подключен к управляющему входу упомянутого ключа, при этом общая точка входных резисторов первого регулятора скорости подключена через размыкающий контакт ключа к входу первого регулятора скорости и через замыкающий контакт ключа - к входу второго регулятора скорости, общая точка входных резисторов второго регулятора скорости подключена через второй размыкающий контакт ключа к входу второго регулятора скорое- ти и через второй замыкающий контакт - к входу первого регулятора скорости, выход первого регулятора скорости через третий размыкающий контакт ключа подключен к входу регулятора тока и к первому входному резистору второго регулятора скорос15
20
25
30
ти, а через третий замыкающий контакт - ко второму входному резистору второго регулятора скорости, выход второго регулятора скорости через 35 четвертый размыкающий контакт ключа подключен к второму входному резистору второго регулятора скорости и через четвертый замьшающий контакт клк)ча - к входу регулятора тока.
Редактор А. Долинич
Рц.г.г
Составитель В. Кузнецова Техред ia.Кадар
Заказ 7455/55 Тираж 661Подписное
ВНИИПИ Государственного-комитета СССР
по делам изобретений и открытий 113035, Москва, К-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е. Сирохман
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Электропривод с адаптивным регулятором скорости | 1988 |
|
SU1541749A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод | 1982 |
|
SU1084934A1 |
| Способ автоматического регулирования скорости нереверсивного вентильного электропривода и нереверсивный электропривод постоянного тока | 1990 |
|
SU1831764A3 |
| Двухкратноинтегрирующая система подчиненного регулирования скорости привода | 1973 |
|
SU479208A1 |
Изобретение относится к электротехнике и может найти применение в электроприводах механизмов, требующих малого динамического отклонения скорости при приложении и снятии статической нагрузки. Увеличение быстродействия и уменьшение динамического отклонения скорости при приложении и снятии нагрузки обеспечивается введением второго регулятора скорости 9, параметры которого отличаются от параметров первого регулятора скорости 1, обеспечивающего возможность создания системы с переменной структурой с подчиненными регулированием параметров, многоконтактного ключа 12 и блока 13 формирования сигнала, характеризующего окончание переходного процесса по управлению. Введенные элементы позволяют производить раздельную настройку системы -для работы с высоким качеством как при изменении управляющих, так и возмущающих воздействий. 2 ил. i (Л 1C 00 ее ;о ю со
| Двухкратноинтегрирующая система подчиненного регулирования скорости привода | 1973 |
|
SU479208A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гарнов В.К., Рабинович В.В., Вишневецкий Л.М., Унифицированные системы автоуправления электроприводом в металлургии | |||
| М.: Металлургия, 1971, с | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
