1
(21)4856104/07 (22)01.08.90 (46)07.10.92. Бюл. №37
(71)Ивановский филиал Всесоюзного научно-исследовательского и проект- но-конструкторского института по автоматизированному электроприводу
(72)В.М.Королев
(56)Авторское свидетельство СССР Ms 1288881, кл. Н 02 Р 5/06, 1987.
(54) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
(57)Использование: в механизмах с изменяющимся моментом инерции. Сущность: в
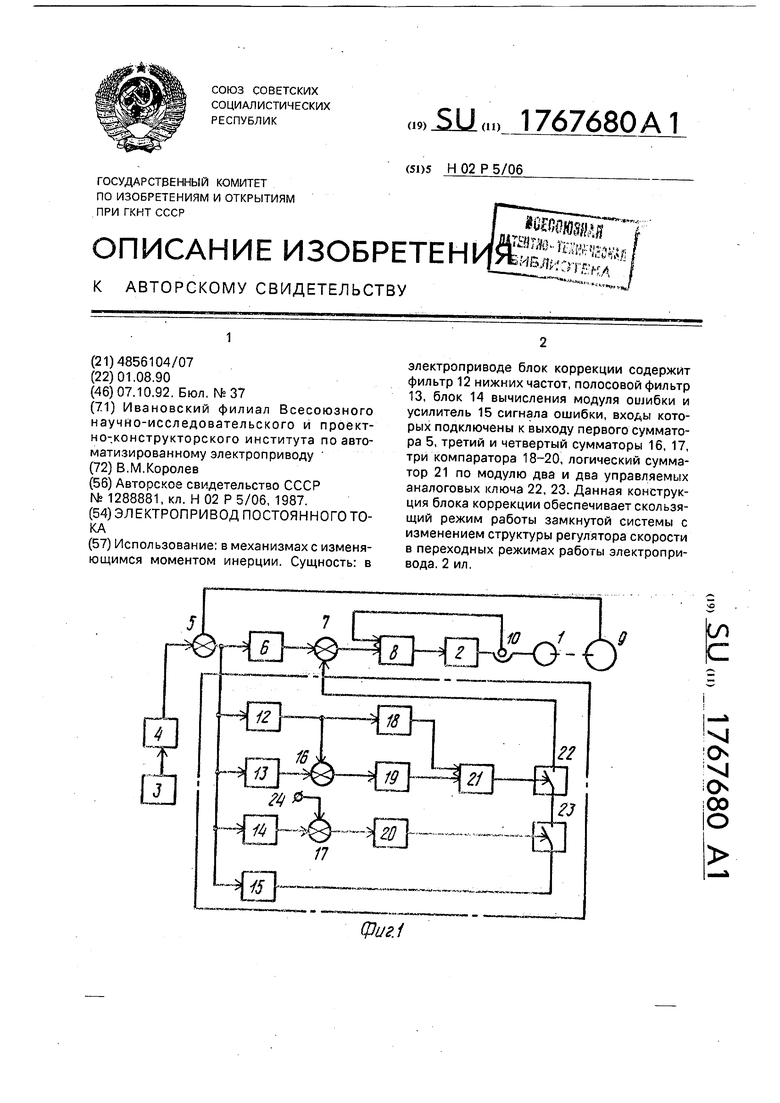
электроприводе блок коррекции содержит фильтр 12 нижних частот, полосовой фильтр 13, блок 14 вычисления модуля ошибки и усилитель 15 сигнала ошибки, входы которых подключены к выходу первого сумматора 5, третий и четвертый сумматоры 16, 17, три компаратора 18-20, логический сумматор 21 по модулю два и два управляемых аналоговых ключа 22, 23. Данная конструкция блока коррекции обеспечивает скользящий режим работы замкнутой системы с изменением структуры регулятора скорости в переходных режимах работы электропривода. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕЦИЗИОННАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2123756C1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1418882A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫТЯГИВАНИЕМ ВОЛОКНА ПРИ ФОРМОВАНИИ | 2003 |
|
RU2235810C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ раздельного управления реверсивным вентильным электроприводом и устройство для его осуществления | 1984 |
|
SU1354377A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |

ьЬо -б
ел
с
-х|
О
s|
о
;00 О
Фиг.1
Изобретение относится к электротехнике и может быть использовано в механизмах с изменяющимся моментом инерции, в частности в перематывающих механизмах текстильных машин.
Известны аналогичные устройства, содержащие электродвигатель, подключенный к преобразователю,последовательно включенные задатчик скорости, первый сумматор, пропорционально-интегральный (ПИ) регулятор скорости, второй сумматор и регулятор тока, выходом подключенный к входу преобразователя, датчик скорости электродвигателя, подключенный к второму входу первого сумматора, и датчик тока, подключенный к входу регулятора тока.
Недостатком известных устройств является снижение качества регулирования в переходных режимах при изменении момента инерции электропривода,
Наиболее близок к предлагаемому электропривод постоянного тока, содержащий электродвигатель, подключенный к преоб- раз ователю, задатчик скорости, выход которого соединен с эталонной моделью, последовательно включенные первый сумматор, ПИ-регулятор скорости, второй сумматор и регулятор тока, выход которого подключен к входу преобразователя, датчик скорости электродвигателя, выходом под- ключенный к второму входу первого сумматора, датчик тока, выходом подключенный к регулятору тока, и блок коррекции, выход которого подключен к второму входу второго сумматора.
В этом устройстве реализован принцип подчиненного регулирования с дополнительной коррекцией ПИ-регулятора скорости, основанной на организации в замкнутой системе скользящего режима. Блок коррекции регулятора скорости вы- .полней в виде релейного элемента, соответствующие входы которого через усилитель-дифференциатор связаны с датчиком скорости и через эталонную модель - с задатчиком скорости, а выход релейного элемента подключен к второму входу второго сумматора, Выходной сигнал релейного элемента зависит только от знака суммы входных сигналов. Поэтому независимо от режима работы электропривода - переходного или установившегося - выходной сигнал релейного элемента может принимать лишь два предельных значения - положительное или отрицательное. Следовательно, при наличии низкочастотных помех или пульсаций на входах релейного элемента (например, пульсаций в выходном напряжении датчика скорости) на его выходе формируются сигналы прямоугольной формы и
постоянной амплитуды, полярность и длительность которых зависит от параметров низкочастотных помех или пульсаций входного сигнала. В установившемся режиме работы электропривода это обстоятельство приводит к пульсациям тока, дополнительным потерям энергии в электродвигателе и снижению точности регулирования скорости.
Недостатком известного устройства является наличие пульсаций тока, вызывающих дополнительные потери и нагрев электродвигателя и снижение точности регулирования скорости электропривода.
Цель изобретения - снижение пульсаций тока и повышение точности регулирования скорости.
Поставленная цель достигается тем, что в электроприводе постоянного тока, содержащем электродвигатель, подключенный к преобразователю, задатчик скорости, выход которого соединен с эталонной моделью, последовательно включенные первый сумматор, ПИ-регулятор скорости, второй сумматор и регулятор тока, выход которого подключен к входу преобразователя, датчик скорости электродвигателя, выходом подключенный к второму входу первого сумматора, датчик тока, выходом подключенный к регулятору тока, и блок коррекции, выход которого подключен к второму входу второго сумматора, выход эталонной модели соединен с входом первого сумматора и изменена конструкция блока коррекции. Он имеет фильтр нижних частот (ФНЧ), полосовой фильтр (ПФ), блок вычисления модуля ошибки (БМВ) и усилитель сигнала ошибки, входы которых подключены к выходу первого сумматора, третий и четвертый сумматоры, три компаратора, логический сумматор по модулю два (Л С) и два управляемых аналоговых ключа. Выход ФНЧ подключен к входу первого компаратора и первому входу третьего сумматора, выход ПФ - к второму входу третьего сумматора, выход третьего сумматора - к входу второго компаратора, выходы первого и второго компараторов подключены к соответствующим входам Л С, выход которого подключен к управляющему входу первого аналогового ключа. Выход БВМ подключен к первому входу третьего компаратора, второй вход которого подключен к источнику постоянного напряжения, а выход третьего компаратора - к управляющему входу второго аналогового ключа. Выход усилителя сигнала ошибки через последовательно включенные контакты первого и второго аналоговых ключей под- ключен к второму входу второго сумматора.
Предлагаемая конструкция блока коррекции обеспечивает скользящий режим работы замкнутой системы с изменением структуры регулятора скорости в переходных режимах работы электропривода, когда отклонение скорости от заданного значения (ошибка регулирования) по абсолютной величине становится больше амплитуды низкочастотной помехи и пульсаций, и переход к структуре ПИ-регулятора скорости в установившемся режиме работы электропривода, когда ошибка не превышает амплитуды пульсаций или помех. Поэтому предложенное устройство обладает известными свойствами систем с переменной структурой (желаемое качество переходного процесса и малую чувствительность к изменению параметров объекта регулирования) в переходных режимах и свойством астатизма системы подчиненного регулирования с ПИ- регулятором скорости в установившемся режиме, чем и достигается поставленная цель.
На фиг. 1 приведена блок-схема электропривода, на фиг. 2 - схема блока коррекции.
Электропривод содержит электродвигатель 1, подключенный к преобразователю 2, задатчик 3 скорости, выход которого соединен с эталонной моделью 4, последовательно включенные первый сумматор 5, ПИ-регулятор 6 скорости, второй сумматор 7 и регулятор 8 тока, выход которого подключен к входу преобразователя 2, датчик 9 скорости электродвигателя 1, выходом подключенный к второму входу первого сумматора 5, датчик 10 тока, выходом подключенный к второму входу регулятора 8 тока, и блок 11 коррекции, выход которого подключен к второму входу второго сумматора 7. Блок 11 коррекции имеет ФНЧ 12, ПФ 13, БМВ 14 и усилитель 15 сигнала ошибки, входы которых подключены к выходу первого сумматора 5, третий сумматор 16, четвертый сумматор 17, три компаратора 18-20, логический сумматор 21 по модулю два (ЛС) и два управляемых аналоговых ключа 22, 23. выход ФНЧ 12 подключен к входу первого компаратора 18 и первому входу третьего сумматора 16, выход ПФ 13 подключен к второму входу третьего сумматора 16, выход которого подключен к входу второго компаратора 19. Выходы первого компаратора 18 и второго компаратора 19 подключены к соответствующим входам ЛС 21, выход которого подключен к управляющему входу первого аналогового ключа 22. Выход БВМ 14 подключен к первому входу третьего компаратора 20, второй вход которого подключен к источнику 24 постоянного
напряжения, а выход третьего компаратора 20 подключен к управляющему входу второго аналогового ключа 23. Выход усилителя 15 сигнала ошибки через последовательно
включенные контакты аналоговых ключей 22, 23 подключен к второму входу второго сумматора 7. Передаточная функция замкнутого контура регулирования тока имеет вид:
.- 5ГРГ(1)
где Кю - коэффициент передачи датчика 10 тока;
Ттэ эквивалентная постоянная времени контура тока.
Передаточная функция эталонной модели 4:
W -T TT &
где ТА 4Ттэ - постоянная времени. Передаточная функция регулятора 6 скорости, настроенного на симметричный оптимум, имеет вид:
W6(P) Кб
Т6р + Т6р
(3)
.. Тм Кю Сф
где Кб - гкоэффициент усиIттэ кя Кд
ления;
Тб 4Ттэ - постоянная времени регулятора 6 скорости;
Тм - электромеханическая постоянная времени электропривода;
Ня, Сф - параметры электродвигателя 1 Передаточные функции ФНЧ 12 и ПФ 13 соответственно:
Wl2(P)
ТР + 1
-, Wi3
Ti3R
(ГР+1)
i2
(4)
где т- 0,1 Т4, Тчз - постоянные времени.
На выходе первого сумматора 5 формируют ошибку х регулирования скорости
электропривода:
х Us U4 - Ug,(5)
где Щ и Ug - соответственно выходные сигналы эталонной модели 4 и датчика 9 скорости.
С учетом (4) и (5) на выходе третьего сумматора 16 формируют функцию переключения второго компаратора 19 - сигнал в виде комбинации ошибки и ее производной при одновременной фильтрации высокочастотных помех:
Uie CU12 + - Ui3 Cx +
dx
(6)
Ti3 dt
где С 0 - постоянный коэффициент.
Выходной сигнал БВМ 14 и усилителя 15, соответственно:
. ,
(7)
где KIS - коэффициент усиления.
Выходной сигнал четвертого сумматора 17 формируют в виде:
U17 U14-U24,
(8)
где U24 A, U24 const, А- амплитуда пульсаций сигнала ошибки в установившемся режиме работы электропривода. Коэффициент С в (6) выбирают из условия существования скользящего режима, При известном диапазоне изменения электромеханической постоянной времени Тммин.-.Тммакс (или момента инерции) электропривода
„m jau«- о и Iim JlUiL 0 dtdt
Uie ,
(9)
с учетом того, что в скользящем режиме Uie 0. Компараторы 18, 19, 20 предназначены для определения знака входного сигнала: в зависимости от знака входного сигнала выходной сигнал компараторов принимает значение логического нуля или логической единицы. Алгоритм работы логического сумматора 21 имеет вид:
U21 U18@U19.
(10)
Изобретение иллюстрируется принципиальной схемой блока 11 коррекции (фиг. 2). ФНЧ 12 выполнен в виде Т-образного RC-фильтра (резисторы 25 и 26, конденсатор 27), а также на основе операционного усилителя (ОУ) 28, резисторов 29-31 и конденсатора 32,причем
R26 R25
R26 + R25
C27 R31 С 32 г,
R31 R29
С.
Это сделано для реализации функций ФНЧ 12, ПФ 13 и сумматора 16 согласно (4) и (6) на одном ОУ 28. ПФ 13 выполнен на ОУ 28, резисторах 31, 33 и конденсаторах 32, 34, причем R 31.С 34 Т 13, R 33.С 34 т.
Первый компаратор 18 реализован на ОУ 35, резисторах 36-38 и диоде 39. Логический инвертор 40 служит для формирования знака сигнала ошибки, соответствующего знаку функции переключения Uie в (6), Второй компаратор 19 выполнен на ОУ41, резисторах 42-45 и диоде 46. Логический сумматор
21выполнен на интегральной микросхеме 47. БВМ 14 выполнен по типовой схеме на
ОУ 48, 49, резисторах 50-56 и конденсаторе 57, который предназначен для фильтрации высокочастотных помех. Четвертый сумматор 17 и третий компаратор 20 выполнены на одном ОУ 58, резисторах 59-63 и диоде
R о 7
22, 23 реализованы на интегральных микросхемах 70, 71, В качестве операционных усилителей использованы микросхемы КР140УД708, логических элементов - микросхема К561ЛП2, аналоговых ключей - микросхема КР590КН4.
Устройство работает следующим образом. В режиме работы электропривода, когда модуль ошибки регулирования
превышает значения U24, с выхода компаратора 20 на управляющий вход аналогового ключа 23 подается логический сигнал, который переводит контакт этого ключа в разомкнутое состояние. В этом режиме работы
свойства замкнутой системы определяются параметрами настройки ПИ-регулятора 6- скорости при Тм Тммин, Если отклонение модуля ошибки I x I от нулевого уровня превышает значение U24, контакт ключа 23 замыкается. В этом состоянии ключа 23 на второй вход второго сумматора 7 поступает дополнительный сигнал с выхода блока 11 коррекции, причем величина этого сигнала зависит от состояния контакта аналогового
ключа 22, Если контакт ключа 22 замкнут, на второй вход сумматора 7 поступает сигнал коррекции, равный Uis Kisx. В этом состоянии ключа 22 общий коэффициент пропорционального усиления составляет К К 6 +
+ К 15, а при размыкании контакта ключа
22- К К 6. Состояние контакта ключа 22 определено соотношением (6) и логическим законом (10), из которых следует, что переключение ключа 22 и соответствующее изменение коэффициента К происходит в зависимости от знаков функции переключения Uie и ошибки х. При выполнении условия (9) в замкнутой системе возникает скользящий режим, в результате чего Die мало отклоняется от нуля, т.е. Uie 0и
+ x «0. Следовательно, независимо С at
от значения Тм из диапазона Тммин.-.Тммакс ошибка регулирования хуменьшается от начального значения хо, стремясь к нулю в соответствии с законом:
-ct
x(t)
(11)
При уменьшении модуля ошибки до значения I х I U-и U24 происходит переключение третьего компаратора 20, размыкание контакта ключа 23 и изменение структуры системы - переход к структуре с ПЙ-регулятором скорости независимо от состояния ключа 22.
Таким образом, во-первых, в отличие от прототипа, где релейный выходной сигнал блока коррекции принимает всегда максимальные (положительное или отрицательное) значения независимо от величины отклонения ошибки регулирования от нуля, в предложенном блоке коррекции амплитуда выходного сигнала определяется конечными значениями коэффициентов усиления из условия существования скользящего режима (9), что и обеспечивает снижение пульсаций тока электродвигателя. Во-вторых, при уменьшении модуля ошибки до заданной малой величины блок коррекции обеспечивает изменение структуры замкнутой системы - переход к структуре системы подчиненного регулирования с ПИ-регулятором скорости, т.е. обеспечивает повышение точности регулирования скорости в установившемся режиме работы электропривода.
Экономический эффект от использования изобретения достигается за счет снижения затрат на наладку электропривода, обусловленного малой чувствительностью к изменению момента инерции, улучшения качества продукции за счет повышения точности регулирования скорости, а также за счет экономии электроэнергии при снижении пульсаций тока электродвигателя.
Формула изобретения
включенные первый сумматор, пропорционально-интегральный регулятор скорости, второй сумматор и регулятор тока, выход которого подключен к входу пр еобразователя, датчик скорости, выходом подключенный к второму входу первого сумматора, датчик тока, выходом подключенный к регулятору тока, и блок коррекции, выход которого подключен к второму входу второго
сумматора, отличающийся тем, что, с целью снижения пульсаций тока электродвигателя, выход эталонной модели соединен с входом первого сумматора, а в блок коррекции введены фильтр нижних частот.
полосовой фильтр и усилитель сигнала ошибки, входы которых подключены к выходу первого сумматора, третий сумматор, первый и второй компараторы, логический сумматор по модулю два и управляемый
аналоговый ключ, причем выход фильтра нижних частот подключен к входу тервого компаратора и первому входу третьего сумматора, выход полосового фильтра подключен к второму входу третьего сумматора,
выход третьего сумматора подключен к входу второго компаратора, выходы компараторов подключены к соответствующим входам логического сумматора по модулю два, выход которого подключен к управляющему
входу аналогового ключа, причем выход усилителя сигнала ошибки подключен к второму входу второго сумматора через контакт аналогового ключа.
ключа включен последовательно с контактом первого аналогового ключа.
К Зй/Ход;/ .л70рз. S
30
НИ}-
js
гС
S3
f
Z}-t-CZ tHbjl &
ф kzib -i
P. f
4S
&
d
«
