сл
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Электропривод с упругой механической связью | 1984 |
|
SU1275723A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| Устройство для регулирования тока якоря электродвигателя | 1979 |
|
SU860247A2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
Использование: в лебедке устройства предельной погрузки экскаватора-драглайна. Сущность: для стабилизации натяжения в канате электропривод лебедки реализован по схеме подчиненного регулирования упругого момента и тока с параллельной коррекцией по произвольной упругого момента. Производная упругого момента используется в электроприводе в виде положительной обратной связи, что снижает колебательность упругого момента в переходных процессах, 1 ил.
Изобретение относится к электротехнике и может быть применено в лебедке устройства прицельной погрузки экскаватора-драглайна.
Известны электроприводы грузоподъемных механизмов, выполненные по схеме подчиненного регулирования и содержащие последовательно включенные регуляторы напряжения и тока, систему импульсно-фа- зового управления, реверсивный управляемый выпрямитель, датчики напряжения и тока, подключенные ко входам соответствующих регуляторов.
Наиболее близким по технической сущности является электропривод, содержащий последовательно включенные задатчик, регулятор скорости, регулятор тока, систему импульсно-фазового управления, реверсивный управляемый выпрямитель, электродвигатель, датчики
скорости и тока, подключенные ко вторым входам соответствующих регуляторов, логическое переключающее устройство, входом соединенное с выходом регулятора скорости, а выходами - со вторым и третьим входами реверсивного управляемого выпрямителя.,
Недостатки электропривода заключаются в том, что в канате лебедки устройства прицельной погрузки возникают колебания усилий, что снижает надежность электропривода.
Целью изобретения является повышение надежности электропривода.
Введение отрицательной обратной связи по упругому моменту и положительной обратной связи по его производной стабилизирует натяжение каната лебедки в переходных и установившихся режимах работы, что повышает надежность электропривода,
VI
00
со ю
формирование же сигналов, пропорциональных упругому моменту и его производной из сигналов имеющихся датчиков скорости электропривода лебедки и датчиков напряжения и тока электродвигателя механизма тяги уменьшает количество датчиков, что также повышает надежность электропривода.
Это достигается тем, что в электропривод лебедки экскаватора-драглайна, содержащий задатчик, первый регулятор, второй регулятор, соединенный с последовательно включенными системой импульсно-фазово- го управления, реверсивным управляемым выпрямителем и электродвигателем лебедки, логическое переключающее устройство, вход которого подключен к выходу первого регулятора, а выход- ко второму и третьему входам реверсивного управляемого выпрямителя, датчик тока электродвигателя лебедки, соединенный со входом второго регулятора, датчик скорости электродвигателя лебедки и датчики напряжения и тока электродвигателя механизма тяги экскаватора, блок включения тормоза и тормоз лебедки, дополнительно введены четыре сумматора, апериодическое звено, два интегратора, два блока коэффициентов, фильтр нижних частит и преобразователь полярности сигнала, причем датчик напряжения электродвигателя механизма тяги соединен с последовательно включенными третьим сумматором, апериодическим звеном, четвертым сумматором, вторым интегратором, вторым сумматором, первым блоком коэффициентов и первым интегратором, выход которого подключен ко второму входу первого регулятора, первый вход которого через преобразователь полярности сигнала соединен с выходом задатчика, а выход через первый сумматор - со вторым регулятором, выход второго интегратора через второй блок коэффициентов подключен ко второму входу третьего сумматора, выход второго сумматора соединен со вторым входом первого сумматора, датчик тока электродвигателя механизма тяги через фильтр нижних частот подключен ко второму входу четвертого сумматора, датчик напряжения электродвигателя механизма тяги - к управляющему входу преобразователя полярности сигнала, а датчик скорости - ко второму входу второго сумматора.
При работе электропривода лебедки упругий элемент в операторной форме равен
((Ы2)(1).
где С - жесткость каната; (о - частота вращения электродвигателя лебедки; У2 - час0
5
тота вращения электродвигателя механизма тяги; Р - оператор Лапласа.
В электроприводе лебедки введены следующие обратные связи:
()Јму(2)
(3)
Частота вращения электродвигателя 0 механизма тяги определяется как
КФЦт-ВяСГя -Р+1)МС ffl
(КФ)2(Тэм-Тя-Р2+Тэм-Р+1)и где DT - напряжение электродвигателя механизма тяги; Ф - магнитный поток; К - постоянная электродвигателя; RH - сопротивление якоря; Тя и Там - электромагнитная и электромеханическая постоянные времени электродвигателя механизма тяги; Мс - момент сопротивления электродвигателя механизма тяги.
Для стабилизации натяжения в канате электропривод лебедки реализован по схеме подчиненного регулирования упругого момента и тока с параллельной коррекцией по производной упругого момента.
Производная упругого момента используется в электроприводе в виде положительной обратной связи, что снижает колебательность упругого момента в переходных процессах.
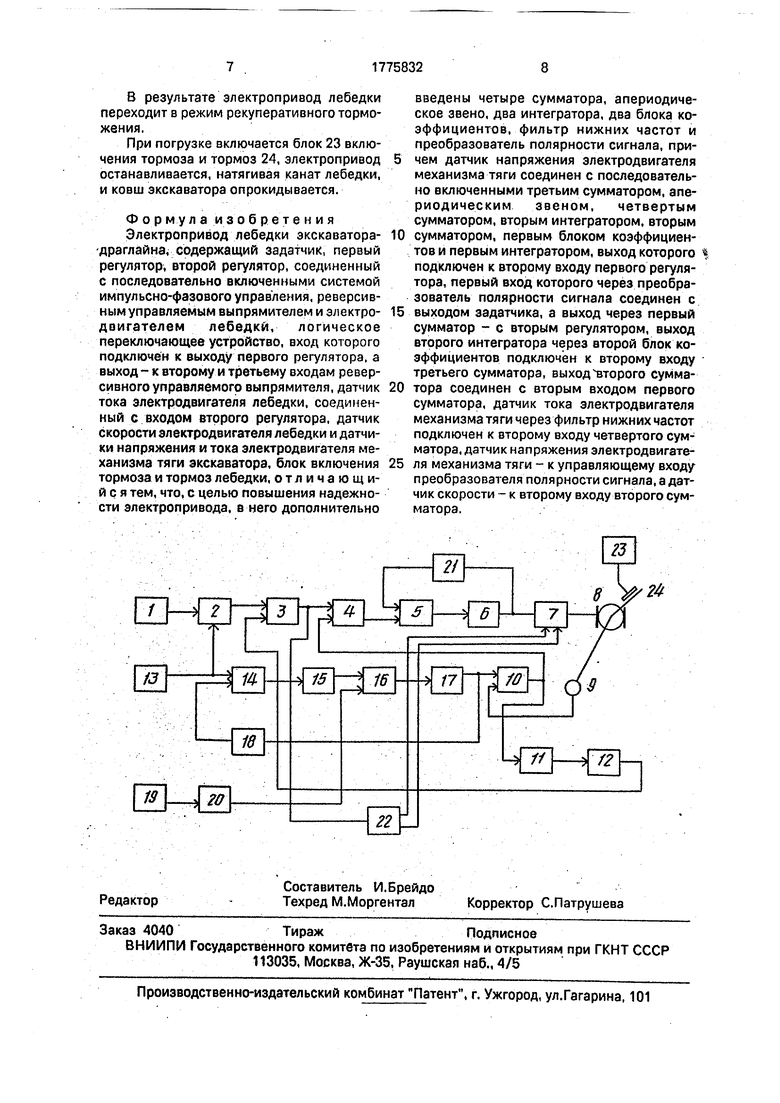
На чертеже представлена схема электропривода.
Электропривод содержит последовательно соединенные задатчик 1, преобразо- ватель 2 полярности сигнала, первый регулятор 3, первый сумматор 4, второй регулятор 5, систему б импульсно-фазового управления, реверсивный управляемый выпрямитель 7, электродвигатель 8 лебед0 ки, датчик 9 скорости и второй сумматор 10, выход которого подключен ко второму входу первого сумматора 4 и через первый блок 11 коэффициентов и первый интегратор 12 - ко второму входу первого регулятора 3. Датчик 13 напряжения электродвигателя механизма тяги соединен с управляющим входом преобразователя 2 полярности сигнала и через последовательно включенные третий
- сумматор 14, апериодическое звено 15, четвертый сумматор 16 подключен ко второму интегратору 17, выход которого подключен ко второму входу первого сумматора 10 и через второй блок 18 коэффициентов - ко второму входу третьего сумматора 14. Датчик 19 тока электродвигателя механизма тяги через фильтр 20 нижних частот соединен со вторым входом четвертого сумматора 16. Датчик 21 тока электродвигателя лебедки подключен ко второму входу второго регулятора 5, а логическое переключающее устройство 22 входом подключено к выходу первого регулятора 3, а выходами ко второму и третьему входам реверсивного управляемого выпрямителя 7. Блок 23 включения тормоза соединен с тормозом 24 лебедки.
Задатчик 1 момента может быть выполнен известным способом-в виде регулируемого делителя напряжения, блоки коэффициентов 11 и 18 - в виде масштабирующих усилителей. Фильтр 20 нижних частот выполнен известным способом, например, в виде активного R-C фильтра.
Логическое переключающее устройство 22 может быть выполнено известным способом, например, в виде ключей со взаимной блокировкой, подключающих при разной полярности выходного сигнала первого регулятора 3 анодную или катодную группу тиристоров в реверсивном управляемом выпрямителе 7.
Преобразователь 2 полярности сигнала может быть выполнен известным способом, например в виде ключа с замыкающим и размыкающим контактом, к которому подключен инвертор, а с управляющим входом ключа соединен диод.
При положительной полярности сигнала на управляющем входе преобразователя 2 замыкается замыкающий контакт и на выходе преобразователя 2 - положительный сигнал, при отрицательной полярности замыкается размыкающий контакт и на выходе преобразователя 2 - сигнал отрицательный.
Электропривод работает следующим образом.
В процессе работы сигнал с задатчика 1 через преобразователь 2 полярности сигнала, первый регулятор 3, первый сумматор 4, второй регулятор 5, систему 6 импульсно- фазового управления и реверсивный управ- ляемый выпрямитель 7 поступает на электродвигатель 8, приводя его в движение.
Сигнал обратной связи через датчик 21 тока поступает на регулятор 5, обеспечивая регулирование тока.
Блоки 14, 15, 16, 17 и 18 имитируют электродвигатель механизма тяги.
Напряжение lh на выходе второго инвертора 17 равно
ЦтКдн -Ка-СГтР+О-Кт -Ц2
(Ti -T2 Р2+Т2Р + 1)
(5)
где LJ2 - выходной сигнал фильтра 20 нижних частот; Ка - коэффициент передачи второго блока 20 коэффициентов; Ki и Ti - коэффициент передачи и постоянная време0
ни апериодического звена 15; Та - постоянная времени второго интегратора 17; Кдн коэффициент передачи датчика 13 напряжения.
Сигнал датчика 19 тока электродвигателя механизма тяги поступает на вход фильтра 20 нижних частот, выходной сигнал которого IJ2 равен
U2 Кдтт Мс
где Кдтт - коэффициент передачи датчика 19 тока электродвигателя механизма тяги.
При выходе коэффициентов и постоянных времени
5
0
5
0
5
0
5
Ki
R к-Ф
КдТт 1че-Т дй
Ti ТяТ2 Там,
Напряжение Ui пропорционально (Oi.
Сигналы Ui и 1)з датчика 9 скорости электродвигателя лебедки поступают на второй сумматор 10, напряжение U4 на выходе которого равно;
U4 Кз (Кдс cot - К дн аъ) где Кдс - коэффициент передачи датчика 9 скорости; Кз коэффициент передачи второго сумматора 10.
Если выбрать
Кз 1Кдн КДС
то U4 пропорционально производной упругого момента в соответствии с (2).
При выборе коэффициента передачи первого блока 11 коэффициентов Кп и постоянной времени первого интегратора 12 Тз равными:
Ю| СТ3 1,
напряжение на выходе первого интегратора 12 пропорционально упругому элементу в соответствии с (3).
Так как сигнал, пропорциональный упругому моменту, с выхода первого интегратора поступает на вход первого регулятора
3,а сигнал, пропорциональный производной упругого момента, с выхода второго сумматора 10 - на вход первого сумматора
4,то в электроприводе обеспечивается стабилизация упругого момента с коррекцией его производной.
При изменении знака сигнала датчика 20 напряжения, что соответствует переходу электропривода механизма тяги в генераторный режим, изменяется знак сигнала на выходе преобразователя 2 полярности сигнала, изменяется полярность выходного сигнала первого регулятора 3, переключается логическое переключающее устройство 22 и управляемый выпрямитель 7 переходит в инверторный режим, реверсируется, изменяются знаки на выходах второго сумматора 10 и первого интегратора 12.
В результате электропривод лебедки переходит в режим рекуперативного торможения.
При погрузке включается блок 23 включения тормоза и тормоз 24, электропривод останавливается, натягивая канат лебедки, и ковш экскаватора опрокидывается.
Формула изобретения Электропривод лебедки экскаватора- драглайна, содержащий задатчик, первый регулятор, второй регулятор, соединенный с последовательно включенными системой импульсно-фазового управления, реверсивным управляемым выпрямителем и электро- двигателем лебедки, логическое переключающее устройство, вход которого подключен к выходу первого регулятора, а выход- к второму и третьему входам реверсивного управляемого выпрямителя, датчик тока электродвигателя лебедки, соединенный с входом второго регулятора, датчик скорости электродвигателя лебедки и датчики напряжения и тока электродвигателя механизма тяги экскаватора, блок включения тормоза и тормоз лебедки, отличающийся тем, что, с целью повышения надежности электропривода, в него дополнительно
введены четыре сумматора, апериодическое звено, два интегратора, два блока коэффициентов, фильтр нижних частот и преобразователь полярности сигнала, причем датчик напряжения электродвигателя механизма тяги соединен с последовательно включенными третьим сумматором, апериодическим звеном, четвертым сумматором, вторым интегратором, вторым сумматором, первым блоком коэффициентов и первым интегратором, выход которого подключен к второму входу первого регулятора, первый вход которого через преобразователь полярности сигнала соединен с выходом задатчика, а выход через первый сумматор - с вторым регулятором, выход второго интегратора через второй блок коэффициентов подключен к второму входу третьего сумматора, выход второго сумматора соединен с вторым входом первого сумматора, датчик тока электродвигателя механизма тяги через фильтр нижних частот подключен к второму входу четвертого сумматора, датчик напряжения электродвигателя механизма тяги - к управляющему входу преобразователя полярности сигнала, а датчик скорости - к второму входу второго сумматора.
8 У#
| Перфенов Б.М. | |||
| Сахаров С.Б., Гумерова С.Х., Мирова Н.Ф | |||
| Система электроприводов установок для сверхглубокого бурения | |||
| - Электротехника, 1986, № 10, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
