подк.пгоченный к фазам СД 1 , in опор- Hbse входы блока 5 noci ynaioT срп-па.ть; с рыходов геисрстгора 6 сиу-гусоида.аь- ных напрякений, 0;ц-;н з)ход генератора 6 через бпок 7 сог.часования частот связан со входом датчика .:, вход которого соединен с входол f У фааосмещающего блока 17 и вводом tO фазосмешающего блока 8, Выходы б:)о- ков 8 и 17 подключены к опорным входам блока 4. В электрогшизод, введены инвертор (И) 12,управляемые ком1-)утаторы (К) 13, 1-, датч)чки 15; 16 тока„ Вход l- i 12 соединен с выхо-I
Изобретение относится к электро- тахнике, а менно к Чсстот}-1о--уирав- ляеуым г лектрот ривода;-, построенль;к на основе синхронных ателсй. и может исг;оль,зсва,но в гфоплиие} ных cj-iCTGMax гюспроиззедепи / нг-Шл в которых o;Il;)eдeJ)Я;ilil l; ri Т эсбо-- ваниями явл лотся бе(:ко такт ;осчч, поивода. aa,iiеж :хк;:ть и то пюств, ха™ ;.ф;-1мар, ;i ;че | ал. 1Оре;куи,их стаггглх,
мoдeл ;, динамлчсскик стендах к т ,д,
1г:зобретеиия 5ио,нется иопы- точв.ости: управлскхт момсп j ох CHHXpoFHOi o двивателл ,На фпт ., I vi,pe,:i:C raB. :exa lir/vi кальная схема элек1 рог ри-:;ол,а -- час тотчо -токоиым унравлечиеь ча осноае
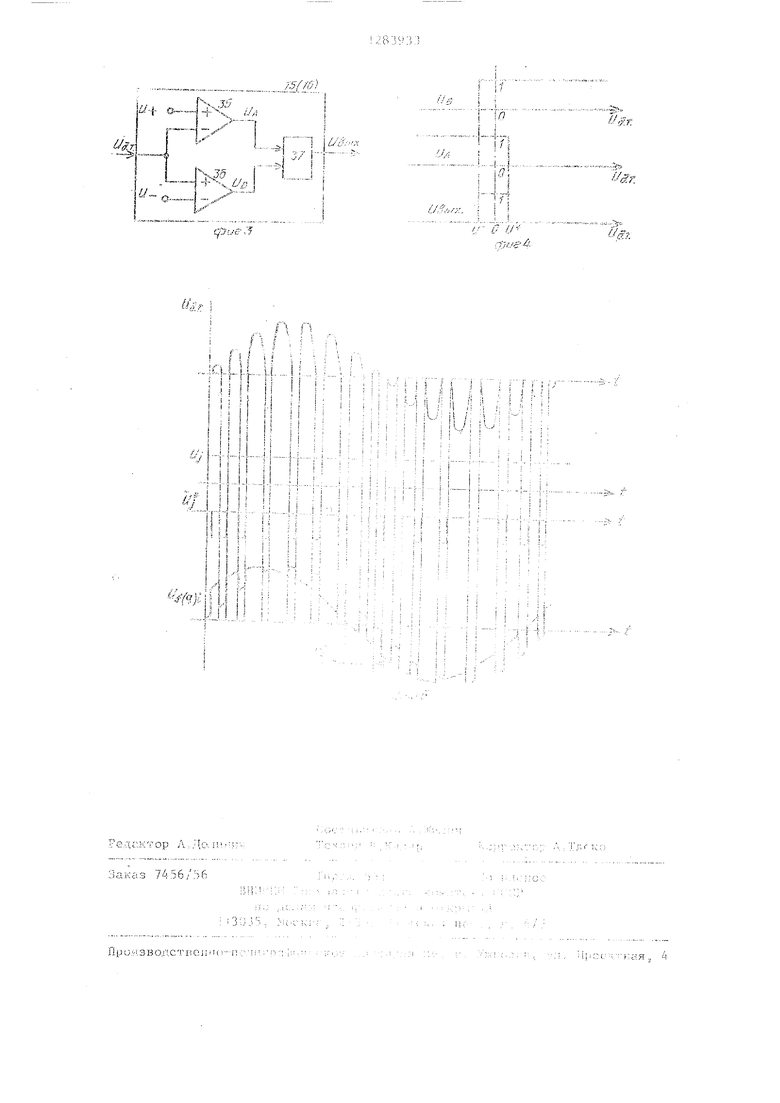
(т -- /}; ;:а gj ir. 2 - с-гсма, аыаолаасн фазосмещаюГ О- о б.г;ока ;, на (рлг, 3 - пример выпс). ; ат хт :а. 1-х1,аИ ;ня О ха на. фиг , i - временные днагу аммы его работы; аа Ьив, 5 - эвюр напряжений, cooT;iOTrnx V( работе - . роирквода в рехсаме Н15ег ыиис ых то- ков ,
Электронриво, с час ;ххгнэ -т(1к o..лl управлением содартсит ч--ф. сввх-- ронный ,тел 1 (па (Ьиг, 1 дан
пример электропривода при ш - 2) с устано)В1е ;|:ым на ei o иалу /в-ч чаком 2 Г Оложения ротора, yci-bBiT xiB 3 (Ьааных токов, выходы которого во,1.1,кл1очелпм ()лока 11 :1йлания чачальной фазы ГЛ I 5 с входов; У блока 8 и с I xojTOM i 8 блока 17. Выход И 12 через i 13; 14 по,цклк}чен к входам 2С и 21 Oj OKOFi 85 7 соответственно. К у: iKiiijifnorun- иходаь Ij, - подкл;оче} ь; и /гчики 15, 16 со ггне ; С7Л5 ино, п л- которых соединены с дог ол И- ri i ,;(.№№ нь;ходамк 22,, 23 уо1-1лителя 3 , ) ;г е тро:1риводе обеспечипае / ся :j г: улирование пача;п, К)й фа.зь: i оков С.2 с учетом ; :онкретного режима токов нагрузки усилитРЛ токоь, .. ил 5
1вания ,
iuaioiifKH
дополнительными третьими входами 20 и 21 соответственно. Усилитель 3 фазных токов снабжен дополнительными выходами 22 и 23, подключенными к. входам соответствующих датчиков 16 и 15 тока. Вход инвертора 12 подключен к выходу блока 11 задания начальной фазы тока синхронного двигателя, выход инвертора 12 - к объединенным между собой входам уп- равляемых коммутаторов 13, 14, выходы которых подключены к третьим входам 20, 21 фазосмещающих блоков .8, 17, Первый вход 18 фазосмещающег блока 17 подключен. К выходу блока 1 1 задания начальной фазы тока синхронного двигателя, второй вход 19 - к выходу датчика 2 положения ротора, выходы фазосмещающих блоков 8, 17 подключены к соответствующим опорным входам блока 4 фазочувстви- тельных выпрямителей. Выходы датчиков 15, 16 тока подключены соответственно к управля ющим входам управляемых коммутаторов 13 и 14,
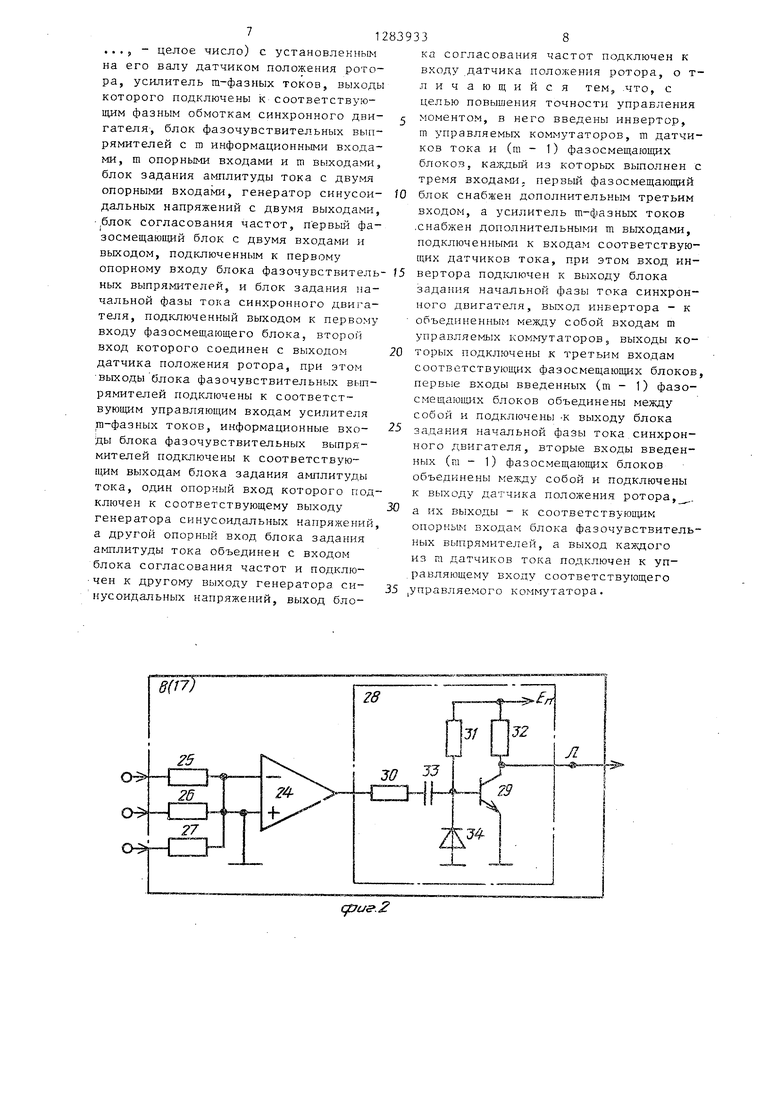
Фазосмещаю1цие блоки 8, 17 содержат трехвходовый компаратор 24 (фиг, 2), собранный на операционном усилителе и резисторах 25-27, Выход компаратора 24 соединен с входом формирователя 28 импульсов, собранного на транзисторе 29, резисторах 30-32, конденсаторе 33 и диоде 34,
Датчики 15, 16 тока выполняют по схеме двухпорогового комларатора (фиг, 3) и содержат усилители 35, 3 подключенные выходами к входам элемента И 37,
Электропривод с частотно-токовым управлением работает следующим обра- зом.
Обмотки синхронного двигателя 1 (в качестве которого используется многополюсная или с электромагнитной редукцией машина) питаются то- ками от усилителя фазных токов 3, который может быть выполнен, например, по схеме охваченного пофазно жесткой обратной связью по выходному току непосредственного преобразо- вателя частоты, построенного на базе реверсивного тиристорного преобразователя с раздельным управлением.
На валу синхронного двигателя 1 установлен датчик 2 положения рото- фа, в качестве которого используется двухпол осная машина типа сельсина или вращающегося трансформатора. Допустим, что обмотка синхронного
двигателя 1 выполнена двухфазной (т 2.) . В этом случае генератор 6 синусоидальных напряжений вырабатывает двухфазную систему напряжений с частотой со, . Одно из этих напряжений поступает на вход блока 7 согласования частот, который форьшру рует на своем выходе требуемую систему синусоидальных напряжений для обеспечения работы датчика 2 положения ротора в режиме фазовращателя. Частота этих синусоидальных напряжений равна О), /р, где р - число пар полюсов мног ополюсного синхронного двигателя 1, Выходной сигнал датчика 2 положения ротора, поступаю1ций на вторые входы 10, 19 фазоснещающих блоков 8, 17, определяется выражением
и. ..sin( -t -0),
где 0 - угол, равный механическому углу между осью первичной обмотки датчика 2 положения ротора, питающейся напряжением U U sin--t,
и осью вторичной (выходной) обмотки. Двухфазная система напряжений с выхода генератора 6 синусоидальных напряжений поступает также на опорные входы блока 5 задания а тлитуды тока 5, на выходах которого формируются напряжения I
и Uj,cosco,t - .t, Ь д Uj sinco,t + U,jCosQ,t,
где Uj-j, IJg - напряжения задания продольной и поперечной составляющих тока синхронного двигателя 1, Напряжения 1Ц, и поступают на информационные входы блока фазочувствительньгх выпрямителей 4,
В момент смены знака суммарного напряжения на входах компаратора 24 (фиг, 2) фазосмещающего блока 8 (17) с отрицательного на положительный напряжение на его выходе меняет знак с положительного на отрицательный. При этом формирователь 28 импульсов вырабатывает узкий положительный импульс, поступающий на соответствующий опорный вход блока 4 фазочувст- вительных выпрямителей, осуществляющего выборку величины })апряжения 3(4) соответствующего этому момеи5 , 6
ту времени, и хранение этого значе-07 Kpi-iT-r-; и (М, ссчп Vjipajs кия до следующего опорного импульса.. ик-ьи;-ч ;:|1;- 1у глто х к ij и 1а, 3 течеВ результате на выходе блок; 4 фазо- : ii-iTopjiana ;тро1и1,,имс)сти
чувствительных выпрямителей ф(1рми1)у- Ч; :: ; ;-; ;i..rCHToH усм.-тмгс ля i iija3 iM;
ется напряжение (Un; ), зада1)1цс;сj 1 ь:;;и, ч го сгкплиггствуег ni- 4yj;eBi,ii.i
ток в одноименную обмотку синхронии--ь ;1 Ciij iiajra I g, , сооч-зг-rc r;jyb)
го двигателя 1. т. :-v.;My : атор 1
;.ля компенсащ1и фазовых запаздываний, вносимых усилителем 3 фазных V ) сми-гр- икм-о двигателя 1
токон, фаза напряжения IJ2 с выхода - (,:„, ), фо): -1;1руем()е via б;;одатчика 2 положения ротора дополни-;:, - i|::r.-o-;y с : И1;т.;::ьчь х ;ч;лей,
тельно смещается на угол , являю-пг-луллу (ра лл ьй сдииг :-ш угол;|
щийся функцией напряжения U. , пос- ui/- , -4), И ii -iifjine каждо() i: ii i-еряа-тупающег о с выхода блока i 1 задаи;-гял-ь corj-i .четст- у1-:.ич :го нулевым зна че гачальной фазы тока синхронного дви- - лллала ij- па чьг.глдах 2 :: , 22
гателя 1 на входы 9 и 18 фязосмешаю-у;- ;л;: гг.-л фазп: /. тгллд: , лдиоилс: Л1лй
1:Д-П блоков 8 и 17, При этом управ-- % : ::(V ; i 2 л- :- : .; ЛЛ М)1Л Л :лЛЯеГЧЫе коммутаторы 13 и 14, . :; Л-:;а;...- ,Л: Л ( 7 J Л; ЛРОлоторые да входы 20, 21 фаз.- ij л,ло-хО,м о, 17с ш вертора дается
. .
1j, К4 осуществляется с помо1Д ,:л , . чиков 15, 16 н аличия тока ;з фу пл , токолой нагрузки каждой из tbaз у:л лги геля (Ьазных токов 3. Сигна. i ,., с датчика 3 тока усилителя (лазл-ьп-г токов сравнивается с д,вумя поро у :ЫМ 1 ка.чряжениями U и (( И с заданной точностью, определя золу нулевьк токов. На Bii xojte ;) ica 15 (16) нади---ия токов e;iH ii-i4 yporei b сигнала, соответствуои: - замклутому положению упразляекс К(;. утатора 13 и 14 i-гмеет . лько при выполнении успош. I
- - Эт
Ji режиме непрерывного го;л-: у: ;,
ления коммутаторы 13, 14 тказомтллу и напряжение U с вь хода да ) лика . ;1Оложс}П1я ротора дополните.:; лы г л щается на угол р в фя;юсме1:и;:л,л-; блоках 8, 17, Г апряжени 1 зaд.aми) токов в обмотках синхр/ошюг о теля 1 j формируемьк на :оыходах бл( ;са 4 Иразочувствительпых BI;: агмеют при этом cлeдyюlдн BI
I
,,-г-л,;Л J (|а.л;ь ;- лгл{: -; лал1) л ен1-;
и 5 т.е. при KyjieBbix ; Огллс
t-(i
U;,; - U.(p9 + р, ; -:- U,, гл)н(рл
+%й j, ;
Дог1олнительное фазовое смел1е -с; гока на угол р у позволяет лсл-.ц-л.-л-л- рова 1 ь фазов1,1е запаздывания впОчЛ; ;--1ые усилителем 3 фазных токов.
В прерывистого Toiva ходит пс)сл1едователы-;ое лера,лллалп-j
,. , j - целое число) с ycтaнoвлe :ным на его валу датчиком положения ротора, усилитель т-фазных токов, выходы которого подключены к соответствующим фазным обмоткам синхронного двигателя, блок фазочувствительных выпрямителей с m информационными входами, m опорными входами и m выходами, блок задания амплитуды тока с двумя опорными входами, генератор синусоидальных напряжений с двумя выходами, ,блок согласования частот, п ервый фа- зосмещающий блок с двумя входами и выходом, подключенным к первому
опорному входу блока фазочувствитель- )5 вертора подключен к выходу блока
ных выпрямителей, и блок задания начальной фазы тока синхронного двигателя, подключенный выходом к первому входу фазосмещающего блока, второй вход которого соединен с выходом датчика положения ротора, при этом выходы блока фазочувствительных выпрямителей подключены к соответствующим управляющим входам усилителя га-фазных токов, информационные вхо- ды блока фазочувствительных выпрямителей подключены к соответствующим выходам блока задания амплитуды тока, один опорный вход которого подключен к соответствующему выходу генератора синусоидальных напряжений а другой опорный вход блока задания амплитуды тока объединен с входом блока согласования частот и подключен к другому выходу генератора си- нусоидальных напряжений, выход бло
ка согласования частот подключен к входу датчика положения ротора, о т- личающийся тем, что, с целью повышения точности управления моментом, в него введены инвертор, m управляемых коммутаторов, m датчиков тока и (т - 1) фазосмещающих блоков, кшкдый из которых выполнен с тремя входами, первый фазосмещающий блок снабжен дополнительным третьим входом, а усилитель т-фазных токов .снабжен дополнительными m выходами, подключенными к входам соответствующих датчиков тока, при этом вход инзадаиия начальной фазы тока синхронного двигателя, выход инвертора - к объединенным между собой входам m управляемых коммутаторов, выходы которых подключены к третьим входам соответствующих фазосмещающих блоков первые входы введенных (т - 1) фазосмещающих блоков объединены между собой и подключены -к выходу блока задания начальной фазы тока синхронного двигателя, вторые входы введенных (га - 1) фазосмещающих блоков объединены между собой и подключены к выходу датчика положения ротора, а их выходы - к соответствующим опорным входам блока фазочувствительных выпрямителей, а выход каждого из г;1 датчиков тока подключен к управляющему входу соответствующего управляемого коммутатора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с частотно-токовым управлением | 1981 |
|
SU1136292A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Устройство для управления двигателем переменного тока | 1985 |
|
SU1272461A1 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| Электропривод с частотно-токовым управлением | 1987 |
|
SU1495973A1 |
| Способ частотно-токового управления двухфазным синхронным двигателем | 1990 |
|
SU1758824A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1279042A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
Изобретение относится к электротехнике и может быть использовано в промьшшенных системах воспроизведения движений. Целью изобретения является повышение точности управления моментом синхронного двигателя. Электропривод с частотно-токовым управлением содержит го-фазный синх- рояный двигатель (СД) 1. На его валу установлен датчик 2 положения ротора. В состав электропривода входят последовательно соединенные между собой блок 5 задания амплитуды тока с двумя опорными входами, блок 4 фазочувствительных выпрямителей и усил11тель 3 фазных токов, выходом С to ю сю
cpuff.2
H . Us
| Устройство для управления электрической машиной переменного тока | 1980 |
|
SU930555A1 |
| Электропривод с частотно-токовым управлением | 1981 |
|
SU1136292A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
