Изобретение относится к электротехнике, а именно к электроприводам переменного тока с частотно-токовым управлением, и может быть использовано для управления линейными синхронными индукторными двигателями.
Известен способ частотного управления синхронным двигателем, который позволяет с высокой точностью регулировать скорость вращения ротора двигателя.
Недостатком известного способа являются трудности создания быстродействующего прецизионного электропривода на базе синхронного двигателя. Это объясняется склонностью к качаниям ротора двигателя, которая особенно отрицательно проявляется при нестационарной нагрузке на валу двигателя.
Наиболее близким по технической сущности является способ частотно-токового
управления двухфазным синхронным двигателем, при котором фазные обмотки синхронного двигателя запитывают синусоидальным и косинусоидальным токами равной амплитуды и, регулируя амплитуду которых, управляют моментом вращения синхронного двигателя.
Недостатком известного способа является невысокая точность управления моментом вращения, обусловленная пульсациями момента, вызванными погрешностью установки фазных секций двигателя друг относительно друга.
Целью изобретения является повышение точности управления моментом вращения путем исключения пульсаций момента, вызванных погрешностью установки фазных секций двигателя друг относительно друга.
VJ
СП 00 00
к
Jsb
Поставленная цель достигается тем, что согласно известному способу частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки синхронного двигателя запитыва- ют синусоидальным и косинусоидальным токами равной амплитуды и, регулируя амплитуду которых, управляют моментом вращения, предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, дополнительно сдвинутыми по фазе на угол, равный указанной погрешности с противоположным знаком.
Способ частотно-токового управления двухфазным синхронным двигателем заключается в том, что:
1.Предварительно, на этапе наладки привода, определяют угловую погрешность взаимной установки фазных секций двигателя друг относительно друга.
2.Фазные обмотки двигателя запитывают синусоидальными и косинусоидальнымм токами равной амплитуды.
3.Указанные токи дополнительно сдвигают по фазе на угол, разный указанной погрешности с противоположным знаком.
4.Управляют моментом вращения двигателя путем регулирования амплитуды токов.
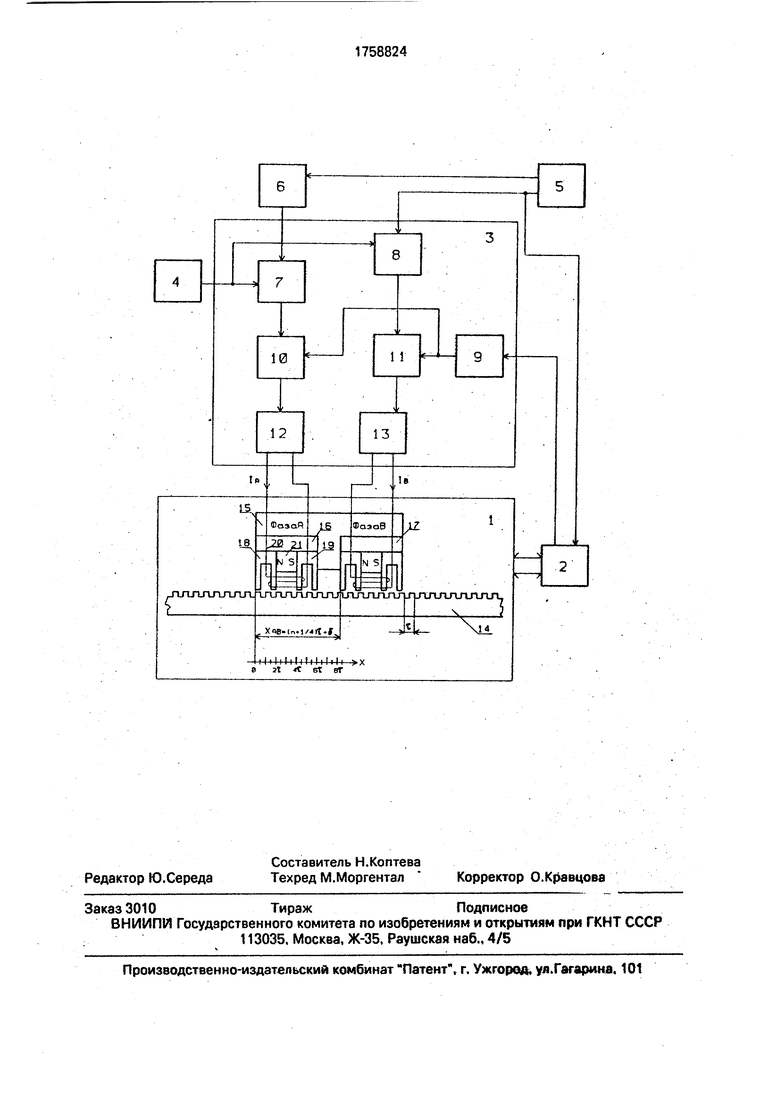
На чертеже представлена Схема электропривода переменного тока побазелиней- ного синхронного индукторного двигателя. Управление силой тяги линейного двигателя осуществляется в соответствии с предлагаемым способом.
Электропривод содержит линейный двигатель 1, линейный датчик 2 положения, подвижный элемент которого жестко соединен с подвижным элементом линейного двигателя 1, формирователь 3 фазных токов линейного двигатели, первый управляющий вход которого подключен к задатчику 4 силы тяги, второй управляющий вход - к выходу линейного датчика 2 положения, а токозада- ющие выходы - к фазным обмоткам линейного двигателя 1, источник 5 синусоидальных напряжений, первый выход которого подключен к опорному входу линейного датчика 2 положения и к первому опорному входу формирователя 3 фазных токов, а второй выход - через фазосмещаю- щий блок б к второму опорному входу формирователя 3 фазных токов.
Формирователь 3 фазных токов линейного двигателя содержит первый и второй блоки 7,8 умножения, формирователь 9 опорных сигналов, первый и второй фазо- чувствительные выпрямители 10,11, управляющие входы которых подключены к выходам блоков 7,8 умножения, а опорные входы - к выходу формирователя 9 опорных сигналов, первый и второй регулируемые источники 12,13 тока, подключенные входами к выходам фазочувствительных выпрямителей 10,11.
При этом первым управляющим входом формирователя 3 является первый вход блока 7 умножения, объединенный с первым входом блока 8 умножения, вторым управляющим входом - вход формирователя 9 опорных сигналов, первым и вторым опорными входами - вторые входы блоков 7,8
умножения, токозадающими выходами - выходы регулируемых источников 12,13 тока.
Линейный двигатель 1 содержит ферромагнитный зубчатый статор 14 и подвижный
элемент 15. состоящий из фазных электромагнитных модулей 16,17. Каждый электромагнитный модуль включает в себя П-образныемагнитопрозоды 18.19, обмотку 20 управления и постоянный магнит 21 возбуждений. Зубцовая зона линейного двигателя 1 выполнена с шагом т .
Устройство работает следующим образом.
Пуст ь электромагнитные модули 16 и 17
взаимно смещены с некоторой инструментальной погрешностью, т.е. электромагнитные модули установлены друг относительно друга вдоль направления движения на длину
ХАВ(Л+) r-f(5 .
где t - «jar зубцовой зоны двигателя; 406 - инструментальная погрешность,
п - любое целое число. Согласно частотно-токовому способу управления синхронной машиной 2 линейный двигатель 1 будет развивать силу тяги 45
F c(iASfn p -НвCos(f + Д0)),(1)
где р
2л
х - угол, определяющий положение подвижного элемента 15 по отношению к зубцам статора 14.
2 ут
Д# --д - угловая погрешность
взаимной установки фазных электромагнит- ных модулей 16 и 17,
х - текущее положение подвижного элемента 15 вдоль направления движения.
IA и IB - фазные токи,
с - коэффициент пропорциональности.
В соответствии с предлагаемым способом обмотки 20 управления электромагнитных модулей 16 и 17 должны запитыааться фазными токами
IA lo Sin (р , is to Cos ( р - А (р}, (2)
где 0 - амплитуда фазных токоз.
Тогда согласно (1) получаем, что линейный
двигатель 1 будет развивать силу тяги
F cie Cos2 Д (р .
Приведем обоснование преимущества предлагаемого способа управления путем сравнения тяговых усилий, развиваемых линейным двигателем 1 в соответствии с изве- стным и предлагаемым способами управления.
При запитке фазных обмоток линейного двигателя 1 согласно известному способу, т.е. когда
IA to Sin p , в io Cos (p , будет возникать сила тяги
ч
F (CbЈM-i s,nMs«n(ty +4))
состоящая из двух слагаемых. Первая слйга- эмая являет ел основной и пропсриионаяь- .ia амплитуде фазных токз Вторая слагаемая является паразит),ой и представляет собой пульсирующую силу, амплитуда которой пропорциональна инструментальной погрешности взаимной установки фазных электромагнитных модулей.
Введем в рассмотрение отношение rj амплитуды паразитной слагаемой силы тяги к ее основной слагаемой, а также отношение о основных слагаемых тяговых усилий, развиваемых линейным двигателем в соответствии с предлагаемым и известным способами соответственно.
Для известного и пседлагаемого способов будем иметь
тромагнитных модулей Наблюдается некоторое снижение удельной силы тяги.
Например, при г 2 мм и 6 0,05 мм имеем: J/i-8%, 0,г 98,2%.
Требуемые фазные токи (2) в обмотках двигателя 1 вырабатываются следующим образом.
На первый управляющий вход формиро- вателя 3 фазных токов поступает сигнал UF в виде напряжения постоянного тока, пропорционального требуемой силе тяги, а на первый и второй опорные входы приходят синусоидальное напряжения
UoSin a) I, UoCos ( (tt t - Д р),
где со - опорная частота,
Д (р - сдвиг по фазе, задаваемый фа- зосмещающим блоком 6,
Uo - постоянная величина. Следовательно, на управляющих входах фазочувствительных выпрямителей 10 и 11 сформируются синусоидальные напряже- ния
UoUpSln ft) t. UoUpCos ( (О l - Д tp) . (3)
В качестве линейного датчика 2 положе- ния используется фазовращатель по базе линейного индуктосина. С выхода датчика 2 положения поступает на второй управляющий вход формирователя 3 фазных токов синусоидальное напряжение, пропорцио- нальное Sin ( ш t - р), в фазе которого со- держится информация о положении
п -
f х подвижного элемента линейного
двигателя 1.
Это напряжение поступает на формирователь 9 опорных сигналов, который преобразует его в последовательность коротких импульсов, вырабатываемых в моменты смены знака входного напряжения с отрицательного на положительный, т.е. в моменты времени


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1836804A3 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1781810A1 |
| Электропривод с частотно-токовым управлением | 1981 |
|
SU1136292A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1988 |
|
SU1700737A1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| БЕСКОНТАКТНЫЙ РЕВЕРСИРУЕМБШ РЕГУЛИРУЕМЫЙПРИВОД | 1969 |
|
SU253226A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1283933A1 |
Использование: управление линейных синхронных индукторных двигателей. Сущность изобретения: способ заключается в том, что фазные обмотки ротора эапитыва- ют синусоидальными и консинусоидальны- ми токами равной амплитуды, регулируя амплитуду которых, управляют моментом, предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, сдвинутыми по фазе на угол, равный указанной погрешности с противоположным знаком. 1 ил.
Sin
Cos2 72 0
r -
Cos2A p 50
анализа полученных результатов следует, что запитка линейного двигателя фазными токами (2), в соответствии с предлагаемым способом, исключает возникновение паразитных пульсаций силы тяги из-за погрешности установки фазных элекtl 2- i±Ј, .1.2,...(4)
Сформированная последовательность коротких импульсов поступает на опорные входы фазочувствительных выпрямителей
10,11.
Фазочувствительный выпрямитель представляет собой элемент выборки-хранения, включающий в себя запоминающий конденсатор и управляемый ключ, входная цепь которого образует управляющий вход
фазочувствительного выпрямителя, а цепь коммутации ключа - опорный вход фазочувствительного выпрямителя.
Поскольку на управляющие входы фазо- чувствмтельных выпрямителей 10,11 приходят синусоидальные напряжения (3), а на опорные входы - короткие импульсы в моменты времени (4), то на выходах фазочувст- вительных выпрямителей сформируются ступенчатые сигналы, аппроксимирующие напряжения
UoUpStn (р + 2 л ) UoUpSIn p
UoUFCos( + 2#l -Д) UoUFCos(-A0)
Сформированные напряжения поступают на входы регулируемых источников 12,13 тока, которые вырабатывают в обмотках линейного двигателя 1 токи, пропорциональные заданию, т.е. равные требуемым фазным токам (2).
Таким образом, предварительное определение угловой погрешности взаимной ус- тановки фазных секций двигателя и взаимное дополнительное смещение токов в фазных обмотках двигателя по фазе на угол, равный указанной погрешности с противоположным знаком, позволяет исключить пульсации момента, вызванные погрешностью установки фазных секций двигателя друг относительно друга, тем самым повысить точность управления моментом вращения двигателя. Предлагаемый способ может найти применение при управлении как круговыми, так и линейными синхронными двигателями.
Формула изобретения
Способ частотно-токового управления двухфазным синхронным двигателем, при котором фазные об тотки двигателя запитывают синусоидальным и косинусоидальным токами равной амплитуды, регулируя амплитуду которых, управляют моментом, отличающийся тем, что, с целью повышения точности управления моментом путем исключения пульсаций момента, вызванных погрешностью установки фазных секцмй двигателя друг относительно друга, предварительно определяют угловую погрешность взаимной установки фазных секций двигзтеля и фазные обмотки зачитывают указанными токами, сдвинутыми по фазе на угол, равный указанной погрешности с противоположным знаком.
гиггиггитгиг
ит-Л-гигпл ги ит-гигпгигл
XQB.ln.
ИИ I Illl III lltll X
2t Л St ВТ
.пллгиплпл t
| Чиликин М.Г., Сандлер А.С | |||
| Общий курс электропривода | |||
| М.: Энергоиздат, 1981 | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Бродовский В.Н., Иванов Е.С | |||
| Приаодч- с частотно-токовым управлением, Под ред | |||
| В.Н.Бродовского | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
