Изобретение относится к дроблению, ород, полезных ископаемых, различых твердых материалов, а именно к ековым дробилкам, и может быть исользовано в горнодобьшающей. химической, металлургической отраслях ромьшленности, а также в лабораторой и научно-исследовательской практике разработки и совершенствования техники и технологии дробления.
Цель изобретения - выявление оптимальных режимов дробления различных пород.
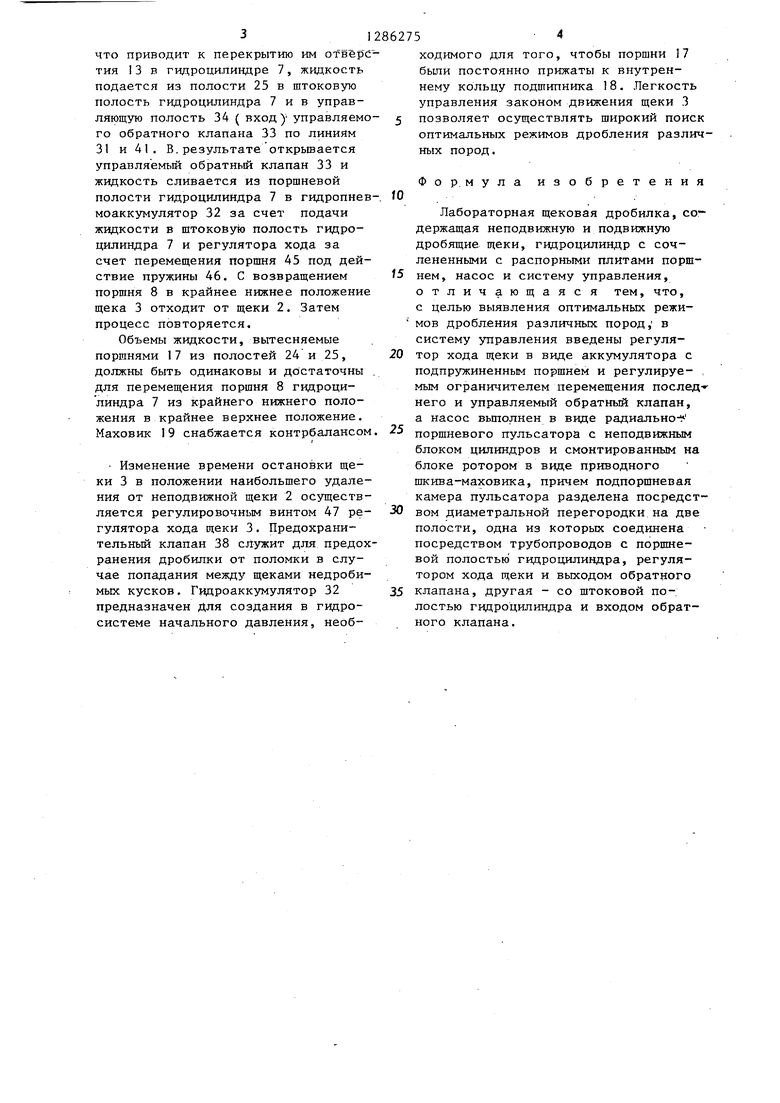
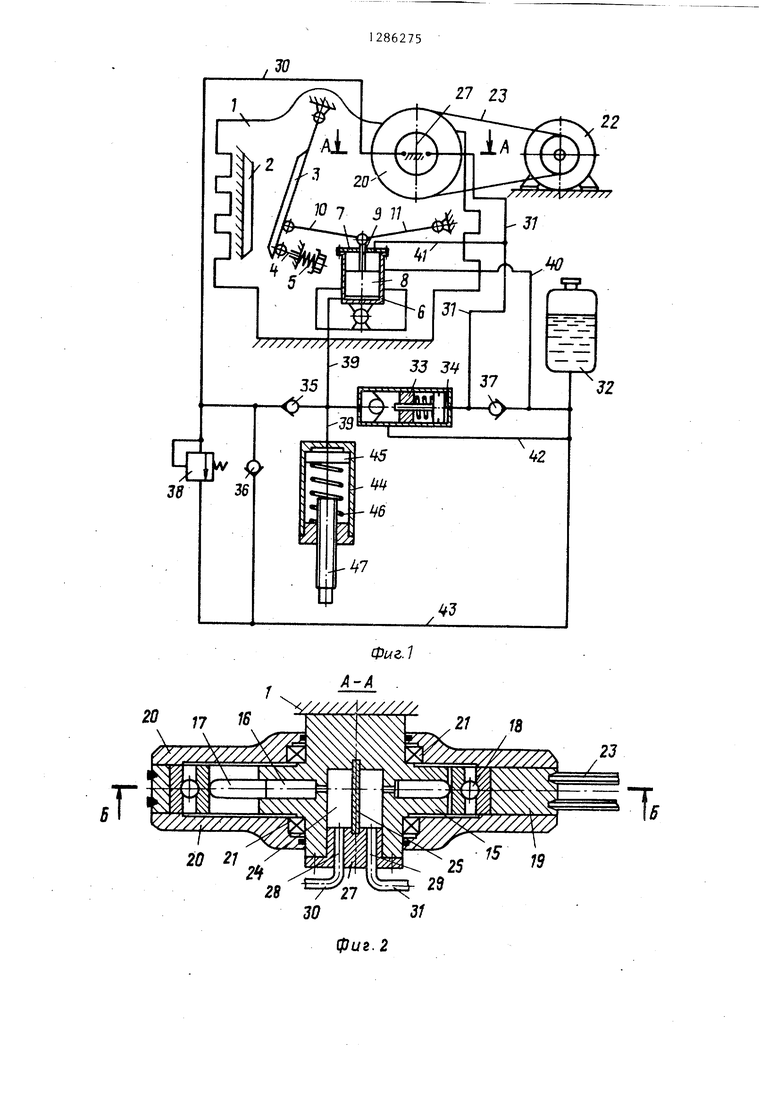
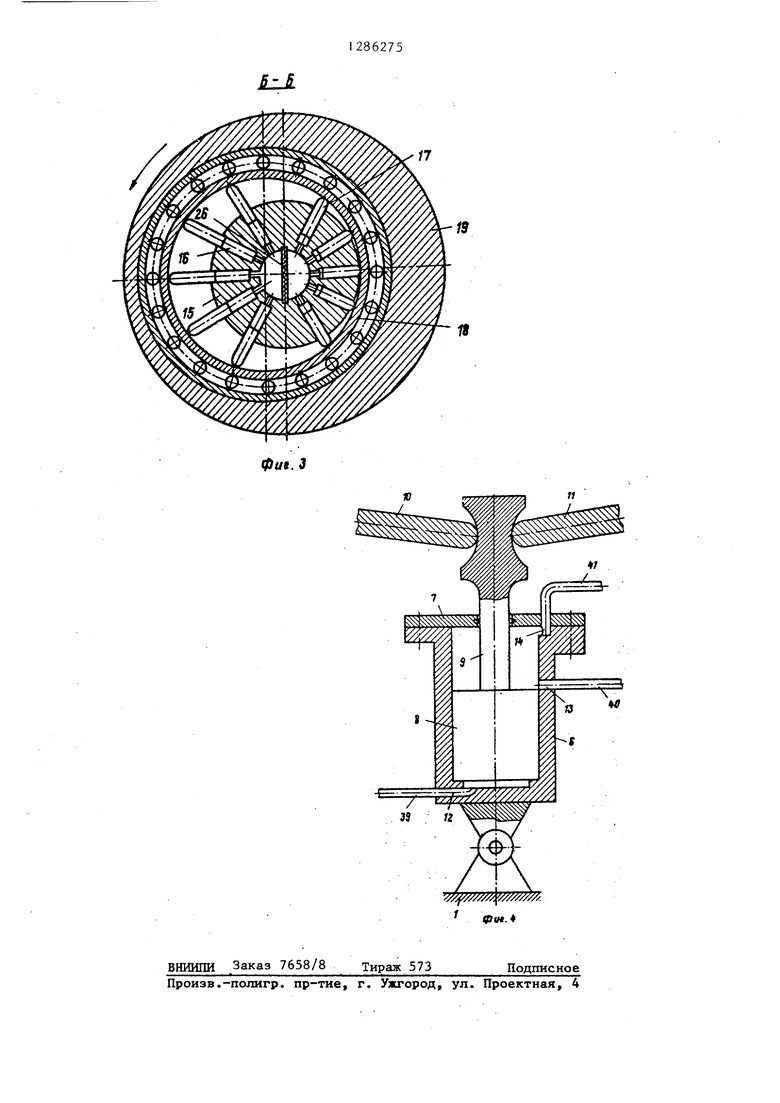
На фиг.I показана совмещенная ринципиальная схема предлагаемой дробилки; на фиг.2 - сече ния А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - узел гидроцилиндра (увеличено).
Дробилка содержит корпус 1(фиг.1) неподвижную и подвижную дробящие щеки 2 и 3, с пружиной 5. Приводом щеки 3 служит гидроцилиндр 6, с крышкой 7, поршнем а и штоком У, соединенным со щекой и корпусом 1 через распорные плиты 10 и 11. В гидроцилиндре 6 выполнены отверстия 12,13 и 14 (Лиг. 4) при этом расстояние между отверстием 13 и верхней
крьшкой 7 гидроцилиндра соответствует максимальному ходу подвижной щеки дробилки. Обращенный радиально-порш- невой насос-пульсатор гидравлического привода подвижной щеки 3 содержит неподвижный блок 15 (фиг.2 и 3)
с радиально расположенными в нем цилиндрами 16J в которых установлены поршни 17, опирающиеся на внутреннее кольцо эксцентрично расположен- ,ного относительно блока 15 подшипника 18. Наружное кольцо подшипника 18 вставлено в шкив-маховик 19, который с помощью боковых крьш1ек 20 и подшипников 21 смонтирован на блоке 15.Ось вращения маховика 19 совпадает с продольной осью блока 15, а его привод состоит из электродвигателя 22 и клиноременной передачи 23. Подпоршневая камера пульсатора разделена на две полости 24 и 25 диаметральной перегородкой 26 так, что количество цилиндров в каждой полости одинаково. Б крьш1ке 27 вьшолнены отверстия 28 и 29 для отвода или подвода жидкости в полости 24 и 25 по трубопроводам (линиям) 30 и 31. Система управлен приводом дробилки содержит гидропневмоаккумулятор
32, управляемьй обратный клапан 33 с управляющей полостью л входом) 34, обратные клапаны 35 - 37, предохра- нительньй клапан 38, трубопроводы 39 - 43 и регулятор хода щеки 3 дробилки. Последний состоит из цилиндра 44, поршня 45, пружины 46 и ограничителя в виде, например, винта 47.
Дробилка работает следующим образом.
При вращении шкива-маховика 19 от электродвигателя 22 через клино- ременную передачу 23 поршни 17 поочередно приближаются к центру блока 15 или удаляются от него. В результате в подпоршневых полостях 24 и 25 происходит чередование циклов всасьшания и вытеснения жидкости через отверстия 28, 29 и трубопроводы 30,31 соответственно. При всасывании жидкости в полость 24 из противоположной полости 25 жидкость , вытесняется и наоборот. Цикл дробления материала начинается, когда подвижная щека 3 находится в положении максимального удаления от неподвижной щеки 2, а поршень 45 регулятора хода подвижной щеки 3 расположен в крайнем верхнем положении (фиг.1). Всасьтание жидкости в полость 24 из гидропневмоаккумулято- ра 32 происходит через обратный клапан 36, а при. вытеснении ее из полости 24 жидкость направляется по линиям 30, 39 и через обратный клапан 35 - в регулятор хода. Циклическая подача жидкости в регулятор хода происходит до момента упора поршня 45 в регулировочный винт 47. Подача жидкости по линии 39 при контакте поршня 45 с регулировочным винтом 47 приводит к перемещению
поршня 8 гидроцилиндра 7, к рабочему ходу щеки 3 и раздавливанию материала между щеками 2 и 3. При подаче жидкости из полости 24 в регулятор хода поршни 17, подпоршневые полости
которых соединены с полостью 25, осуществляют поочередное всасывание и вытеснение жидкости из нее по линиям 31 ,41 , 40 и 43 в гидропневмоаккумулятор 32, а при рабочем ходе поршня 8 жидкость в полость 25 всасыва- ется из штоковой полости гидроцилиндра 7 и из гидропневмоаккумулятора 32 - через обратный клапан 37. После совершения рабочего хода поршнем 8,
что приводит к перекрытию им отвер с тия 13 в гидроцилиндре 7, жидкость подается из полости 25 в штоковута полость гидроцилиндра 7 и в управляющую полость 34 ( вход) управляемо го обратного клапана 33 по линиям 31 и 41. В.результате открьшается управляемый обратный клапан 33 и жидкость сливается из поршневой полости гидроцилиндра 7 в гидропнев моаккумулятор 32 за счет подачи жидкости в штоковую полость гидроцилиндра 7 и регулятора хода за счет перемещения поршня 45 под действие пружины 46. С возвращением поршня 8 в крайнее нижнее положение щека 3 отходит от щеки 2. Затем процесс повторяется.
Объемы жидкости, вытесняемые поршнями 17 из полостей 24 и 25, должны быть одинаковы и достаточны для перемещения порщня 8 гидроцилиндра 7 из крайнего нижнего положения в крайнее верхнее положение. Маховик 19 снабжается контрбалансом
Изменение времени остановки щеки 3 в положении наибольшего удаления от неподвижной щеки 2 осуществляется регулировочным винтом 47 регулятора хода щеки 3. Предохранительный клапан 38 служит для предох ранения дробилки от поломки в случае попадания между щеками недробимых кусков. Гнцроаккумулятор 32 предназначен для создания в гидросистеме начального давления, необ86275 4
ходимого для того, чтобы поршни 17 бьши постоянно прижаты к внутреннему кольцу подшипника 18. Легкость управления законом движения щеки 3
5 позволяет осуществлять широкий поиск
оптимальных режимов дробления различных пород.
Формула изобретения
fO.
Лабораторная щековая дробилка, содержащая неподвижную и подвижную дробящие щеки, гидроцилиндр с сочлененными с распорными плитами поршJ5 нем, насос и систему управления, отличающаяся тем, что, с целью выявления оптимальных режи- мов дробления различных пород, в систему управления введены регуля20 тор хода щеки в виде аккумулятора с подпружиненным поршнем и регулируе- , мым ограничителем перемещения послед него и управляемый обратный клапан,
а насос вьтолнен в виде радиально-; ос
- поршневого пульсатора с неподвижным
блоком цилиндров и смонтированным на блоке ротором в виде приводного шкива-маховика, причем подпоршневая камера пульсатора разделена посредст30 вом диаметральной перегородки на две полости, одна из которых соединена посредством трубопроводов с поршневой полостью гидроцилиндра, регулятором хода щеки и выходом обратного
35 клапана, другая - со штоковой полостью гидроцилиндра и входом обратного клапана.
27 2J
J2
Г
Фиг. 1
А-А . ////А //////
21
18
23
17
19
фи. 3
ВНИИПИ Заказ 7658/8Тираж 573Подписное
Произв.-полигр. , г. Ужгород, ул. Проектная, 4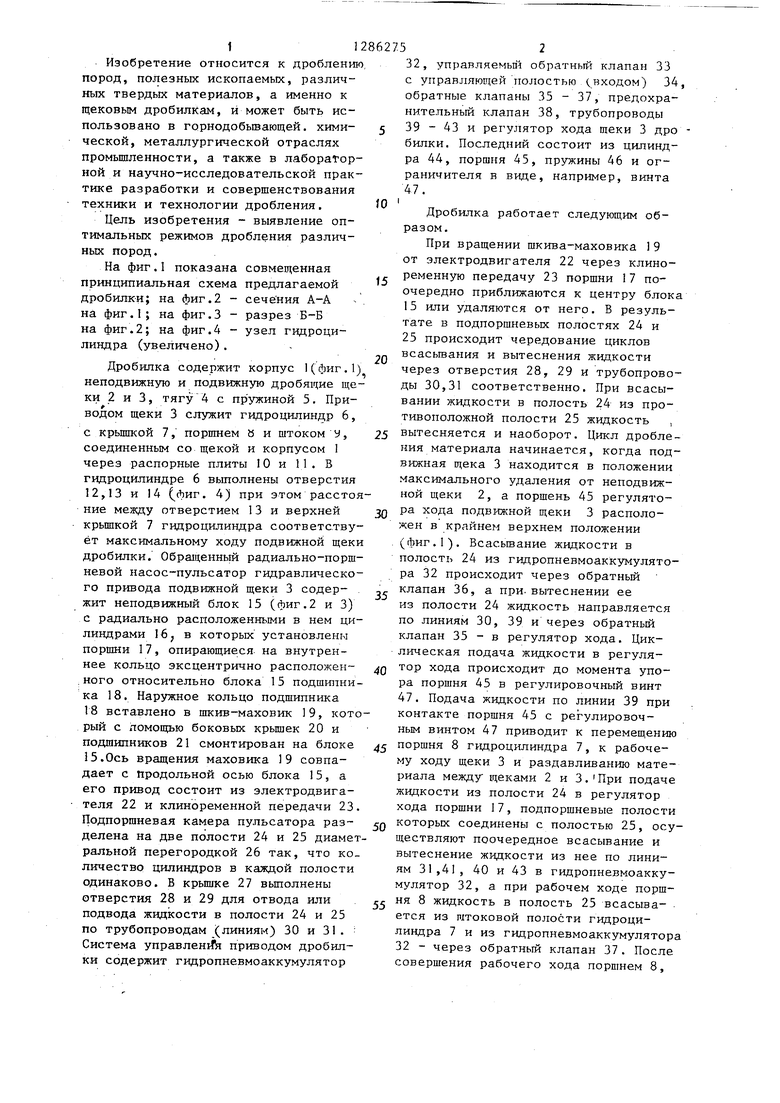
| название | год | авторы | номер документа |
|---|---|---|---|
| ЩЕКОВАЯ ДРОБИЛКА | 1991 |
|
RU2044561C1 |
| Конусная дробилка | 1980 |
|
SU936994A1 |
| Конусная дробилка | 1967 |
|
SU939067A1 |
| Гидроимпульсатор | 1989 |
|
SU1642116A1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| ЩЕКОВАЯ ДРОБИЛКА | 1991 |
|
RU2043787C1 |
| Лабораторная щековая дробилка | 1984 |
|
SU1266560A1 |
| Ресурсосберегающий высокопроизводительный способ дезинтеграции кусков горной породы и щековая дробилка для его осуществления | 2022 |
|
RU2792424C1 |
| Пульсирующий гидромонитор | 1990 |
|
SU1763668A1 |
| ГИДРОПРИВОД ГЛУБИННОГО ШТАНГОВОГО НАСОСА | 2005 |
|
RU2289038C1 |
Изобретение относится к дроблению пород и материалов и имеет целью оптимизацию режимов дробления. Дробилка снабжена гидроприводом (ГП) подвижной щеки (ПШ). ГП состоит из гидроцилиндра, поршень которого сочленен с распорньми плитами ПЩ, насоса и системы управления. В последней имеются регулятор хода ПЩ в виде аккумулятора с подпружиненным поршнем и регулируемым ограничителем перемещения последнего и управляемый обратный клапан. Насос ГП выполнен в виде радиально-поршне- вого пульсатора с неподвижным блоком цилиндром и смонтированным на блоке ротором в виде приводного шкива-маховика. Подпоришевая камера пульсатора разделена на две полости, одна из которых соединена с порршевой полостью гидроцилиндра, регулятором хода ПЩ и выходом обратного клапана, другая - со штоковой полостью гид- роцилиндра и входом обратного клапана. Изменение положения ограничителя регулятора хода ШЦ приводит к изменении закона ее движения . 4 ил. с (Л с ю с Од ю ел
| Асинхронная машина | 1985 |
|
SU1309187A1 |
| ПРИВОД ЩЕКОВОЙ ДРОБИЛКИ | 0 |
|
SU186270A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
