1
Изобретение относится к управлению производственными процессами, а именно к устройствам сопряжения управляющего вычислительного комплекса (УВК) с пневматическими регуляторами.
Цель изобретения - упрощение конструкции.
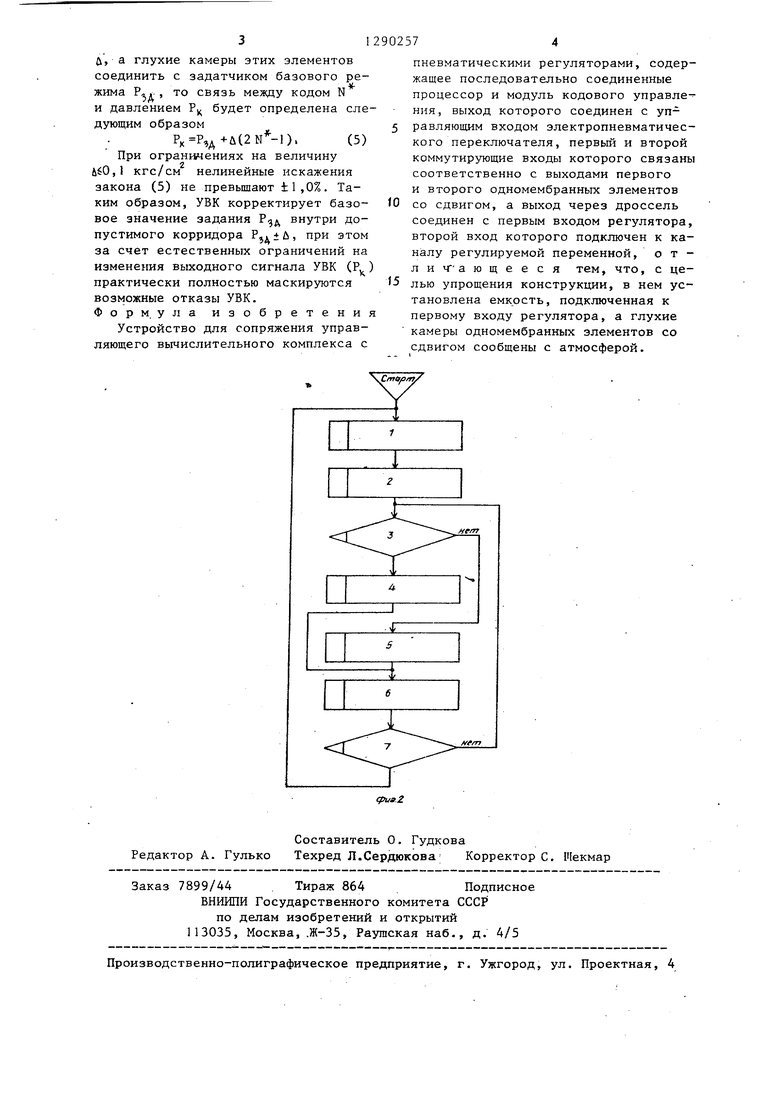
На фиг. 1 приведена принципиальная схема устройства сопряжения; на фиг. 2 - блок-схема программы вывода управляющего воздействия.
Устройство сопряжения содержит процессор I, модуль вьшода дискретного сигнала 2 (модуль кодового управления типа МКУБ-2 системы АСВТ), электропневматический переключатель 3, первый и второй одномембранные элементы со сдвигом 4 и 5, дроссель 6, емкость 7 и пневматический регулятор 8.
Процессор I через модуль кодовог управления 2 связан с управляющим входом электропневматического переключателя 3s первый и второй коммутруемые входы которого соединены соответственно с выходами первого Рц и второго PQ одномембранных элементов со сдвигом 4 и 5, глухие камеры которых сообщены с атмосферой. Выхо
Р|, переключателя J через инерционное звено дроссель 6 - емкость 7 соединен с первым входом регулятора, второй вход которого подключен к каналу реПериодическая последовательност
инерционного звена дроссель - емкость, выделяющего постоянную сосв
гулируемой переменной Pf,g , а выход - 35 тавляющую Pj , пропорциональную
первом приближении выводимому коду
.
с линией исполнительного механизма Р
1
им.
,8у+0,,8 ,2, (3) Уравнение (3) справедливо лишь для линейного дросселя 6. В peaльн случае расходная характеристику др селя 6 подчиняется по нелинейному ламинарному закону. Можно показать что для получения требуемой линейн зависимости между кодом и сигналом Р., исходный код N должен быть ско
Устройство функционирует следующим образом.
Б данной конфигурации осуществля ется супервизорный режим, т.е. УБК воздействует на объект, корректируя задание Р/ локальному регулятору. Цифровой эквивалент задания представ- ляется в виде широтно-модулированной импульсной последовательности с последующим осреднением - вьщелением постоянной составляющей в форме пневматического аналогового сигнала.
Вьшод управляющего воздействия - преобразование кода в широтно-моду- лированный сигнал - реализуется в соответствии с блок-схемой программы фиг. 2.
С помощью программного счетчика осуществляется последовательньй перебор всех возможных значений цифрового кода, начиная с максимального зна
чения ,(,) и сравнение текущего значения (содержимого счетчика) с заданным числом (цифровым кодом, выводимым из УВК). В момент равенства этих цифровых данных производится установка логического вентиля (ключа модуля кодового управления) в единичное состояние. Возврат вентиля в исходное нулевое состояние производится в момент окончания счета (обнуление счетчика) , Если такой процесс повторять с периодом Тц, то на выходе модуля кодового управления формируется периодическая последовательность им- пульсов U(t), относительная длительность которых у пропорциональна выводимому цифровому коду
J
N
N
N
макс
Этот дискретньгй сигнал U (t) изменяет состояние электропневматического переключателя 3 так, что его выходной сигнал в каждом такте преобразования представляет собой прямоугольный импульс давления
р
Р,, при , РЕ,, при (l-),
(2)
Z
где Fj 0,2 кгс/см, ,1 кгс/см - опорные давления, настраиваемые с помощью элементов 4 и 5,
Периодическая последовательность
инерционного звена дроссель - емкость, выделяющего постоянную сосв
тавляющую Pj , пропорциональную
.
,8у+0,,8 ,2, (3) Уравнение (3) справедливо лишь для линейного дросселя 6. В peaльнo случае расходная характеристику дросселя 6 подчиняется по нелинейному ламинарному закону. Можно показать, что для получения требуемой линейной зависимости между кодом и сигналом Р., исходный код N должен быть скор
ректирован
Дч2
М .- (1.2+0,ВМТ-1.44 ,,. J K 2,56 где N - код, подлежащий выводу (цифровое значение задания); М| - скорректированное значение вьшодимого кода.
Программная линеаризация обеспе- чивает преобразование код - давление с погрешностью .порядка 1,0-1,5%.
Если на одномембранных элементах 4 и 5 установить соответственно отрицательное и положительное сь щение
то связь между кодом N
ц будет определена слеU, а глухие камеры этих элементов соединить с задатчиком базового режима Р,,.. 5А и давлением Р
дующим образом
,д-ьй(). (5)
При ограничениях на величину А$0,1 кгс/см нелинейные искажения закона (5) не превышают il,0%. Таким образом, УВК корректирует базовое значение задания внутри допустимого корридора PJ.+U, при этом за счет естественных ограничений на изменения выходного сигнала УВК (Р ) практически полностью маскируются возможные отказы УВК. Форм, ула изобретения
Устройство для сопряжения управляющего вычислительного комплекса с
пневматическими регуляторами, содержащее последовательно соединенные процессор и модуль кодового управления, выход которого соединен с управляющим входом электропневматического переключателя, первьш и второй коммутирующие входы которого связаны соответственно с выходами первого и второго одномембранных элементов со сдвигом, а выход через дроссель соединен с первым входом регулятора, второй вход которого подключен к каналу регулируемой переменной, о т - лич ающееся тем, что, с целью упрощения конструкции, в нем установлена емкость, подключенная к первому входу регулятора, а глухие камеры одномембранных элементов со сдвигом сообщены с атмосферой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система сопряжения управляющего вычислительного комплекса с пневматическими регуляторами | 1980 |
|
SU954938A1 |
| Система сопряжения управляющего вычислительного комплекса с пневматическими регуляторами | 1980 |
|
SU905847A1 |
| Пневматический интегрирующий цифроаналоговый преобразователь | 1989 |
|
SU1640715A1 |
| Пневматический цифроаналоговый преобразователь | 1990 |
|
SU1742809A1 |
| Пневматический блок памяти для систем цифрового управления | 1987 |
|
SU1497623A1 |
| Пневматический пропорционально- диффЕРЕНциАльНый РЕгуляТОР | 1979 |
|
SU830303A1 |
| Система ввода информации от пневматических датчиков в электронную управляющую вычислительную машину | 1980 |
|
SU900307A1 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2032840C1 |
| Пневматическое устройство ограничения "шага" сигнала задания регуляторам | 1988 |
|
SU1583942A1 |
| Пневматический генератор непрерывного линейно убывающего сигнала | 1990 |
|
SU1732355A1 |
Изобретение относится к управлению производственными процессами с помощью управляющего вычислительного комплекса с пневматическими регуляторами. Цель изобретения - упрощение конструкции. Сущность изобретения- заключается в том, что в устройстве, содержащем последовательно соединенные процессор 1 и модуль 2 кодового управления, выход которого соединен с управляющим входом электрсятневматического переключателя 3, установлена емкость 7, подключенная к первому входу регулятора 8, а глухие камеры одномембранных элементов со сдвигом 4 и 5 сообщены с атмосферой. с е (Л tpuf.{
Составитель О. Гудкова Редактор А. Гулько Техред Л.Сердюкова Корректор С. Шекмар
Заказ 7899/44 . Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, .Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Система сопряжения управляющего вычислительного комплекса с пневматическими регуляторами | 1980 |
|
SU905847A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
