1
Изобретение относится к автоматизации очистных работ, а именно к способам и устройствам автоматического и дистанционного управления процессом крепления лавы при посекционной передвижке секций меха- низированной крепи.
Цель изобретения - повышение надежности работы устройства.
В процессе эксплуатации автоматизиро- .ванных очистных комплексов в ряде случаев (при переходе зон горно-геологических нару- шений, при наладке, ремонте и т.д.) возникает необходимость в переходе с автоматического или дистанционного (с центрального пульта ЦПУ) управления на управление секциями крепи непосредственно из лавы. При этом должна быть полностью исключена возможность управления секциями с ЦПУ.
Согласно предлагаемому способу оператор, работающий в лаве, с помощью .носимого пульта управления отключает путем воздействия ненаправленного излучения 2-3 секции крепи, в зоне которых он находится, а также (по магистральной линии связи) - ЦПУ.
Оператор имеет при этом возможность управлять с помощью направленного излуче- ния любой секцией крепи в лаве в пределах зоны видимости, кроме тех 2-3 секций, в зоне которых он сам находится. За счет этого обеспечивается безопасность как самого оператора, так и остального персонала, находящегося в данный момент в лаве.
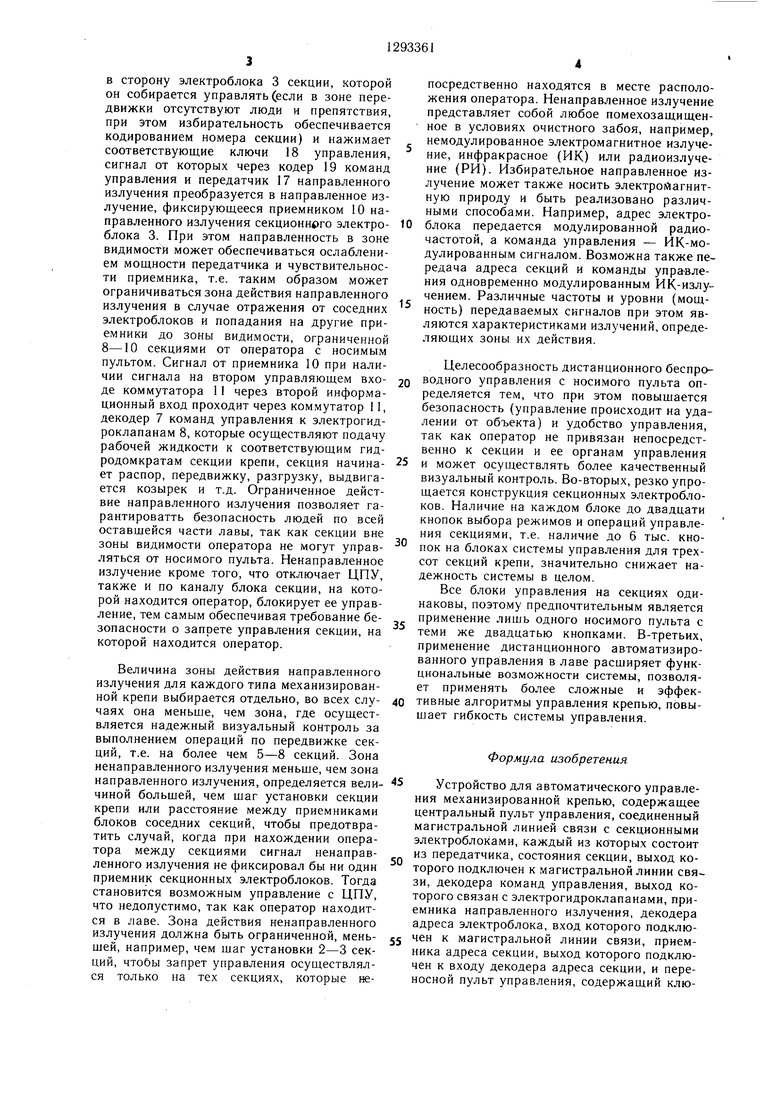
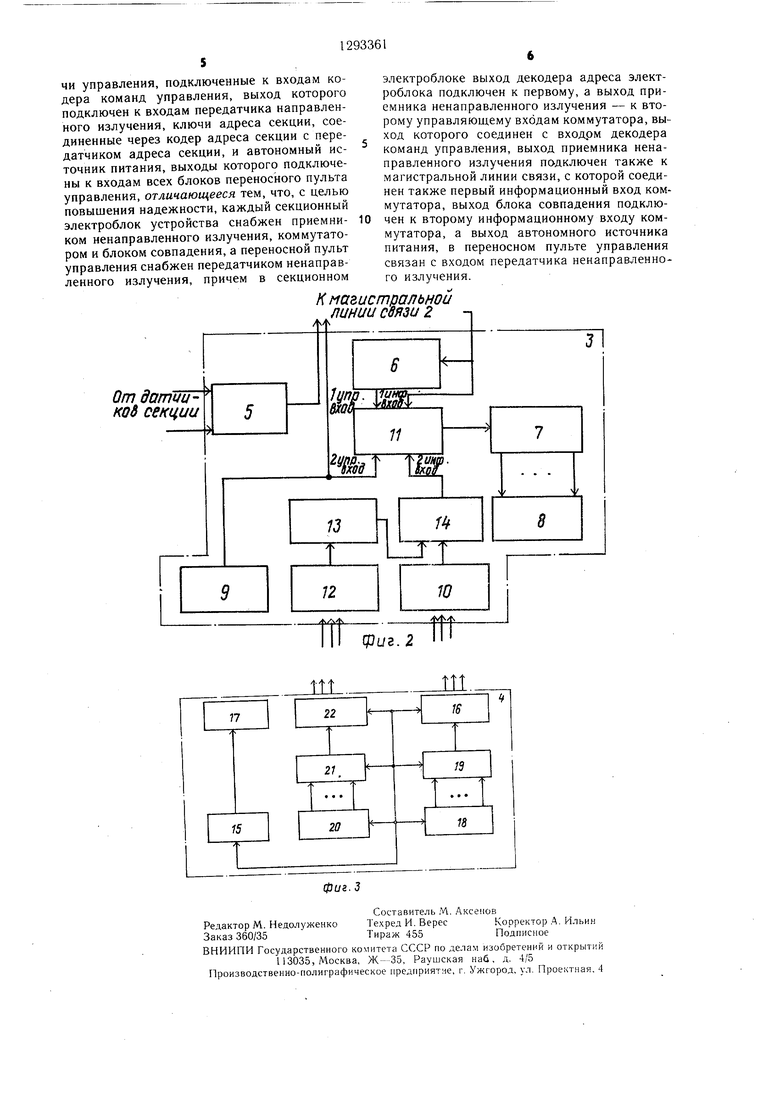
На фиг. 1 представлена общая функциональная схема устройства; на фиг. 2 - структурная схема электроблока управления секцией крепи; на фиг. 3 - структурная схема носимого пульта управления.
Устройство содержит ЦПУ 1, подключенный через магистральную линию 2 связи к секционным электроблокам 3, переносной пульт 4 (фиг. 1). Секционный электроблок 3 содержит (фиг. 2) передатчик 5 состояния секции, декодер б адреса электро- блока, декодер 7 команд управления, элект- рогидроклапаны 8, приемники ненаправленного 9 и направленного 10 излучения, коммутатор 11, приемник 12 адреса секции, декодер 13 адреса секции, блок 14 совпадения. Носимый пульт управления содержит (фиг. 3) автономный источник 15 питания, передатчики ненаправленного 16 и направленного 17 излучения, ключи 18 управления, кодер 19 команд управления, ключи 20 адреса команд, кодер 21 адреса секции, передатчик 22 адреса секции.
С помощью предлагаемого устройства способ автоматического управления механизированной крепью осуществляется следующим образом.
В исходное состоянии на секционный электроблок 3 не поступает управляющая информация ни с ЦПУ 1, ни с переносного пульта 4. При отсутствии человека
2
5
0
оператора в лаве управление передвижением секций осуществляется с ЦПУ 1. Информация от датчиков состояния секции передатчиком 5 передается по магистральной линии 2 связи на ЦПУ 1, где она дещифри- руется декодеро.м и соответствующим образом перерабатывается. Далее сигналы от элементов управления ЦПУ 1 кодируются шифратором адреса секции и шифратором команд управления и передаются обратно через магистральную линию связи 2 на электроблоки секций 3. Адрес секционного электроблока 3 декодируется декодером адреса электроблока 6, сигнал с выхода декодера адреса электроблока 6 поступает на первый управляющий вход коммутатора 11, при этом команды управления от ЦПУ через магистральную линию 2 связи и коммутатор 11 поступают на декодер 7 команд управления, с которого декодированные сигналы управления поступают на электрогидроклапаны 8, которые включают соответствующие гидродомкраты секций крепи. Таким образом происходит управление от ЦПУ 1. При появлении человека-оператора в лаве ненаправленное излучение, передаваемое непрерывно передатчиком ненаправленного излучения 17 пульта 4, фиксируется приемником 9 ненаправленного излучения секционных электроблоков 3 (достаточно, чтобы хотя бы один электроблок зафиксировал это излучение), находящихся в зоне воздействия ненаправленного излучения. Сигнал с приемника ненаправленного излучения 9 запрещает по второму управляющему входу прохождение через коммутатор 11 управляющих сигналов от ЦПУ 1. При уходе человека-оператора с переносным пультом 4 из лавы отсутствует сигнал на втором управляющем входе коммутатора 11 всех электроблоков и управление осуществляется с ЦПУ 1. Таким образом предотвращается возможность включения секции на передвижку от ЦПУ 1, когда в зоне передвижения находится оператор. Этот сигнал разрешает прохождение через коммутатор 1 сигнала от приемника 10 направленного излучения 10.
Оператор набирает номер секции ключами 20 адреса секции (той. которой он собирается управлять), номер секции кодируется и передается передатчиком 22 адреса секции на секцию крепи, принимается этот сигнал приемником 12 адреса секции всех электроблоков 3 секций, дешифрируется декодером адреса секций 23 и если номер секции совпадает с номером секционного электроблока, то на выходе декодера 13 адреса секции именной той секции, которой оператор собирается управлять, появляется сигнал, подготавливающий прохождение информации через второй вход блока 14 совпадения, этим обеспечивается избирательность управления секцией. Далее оператор направляет передатчик 16 направленного излучения
в сторону электроблока 3 секции, которой он собирается управлять (если в зоне передвижки отсутствуют люди и препятствия, при этом избирательность обеспечивается кодированием номера секции) и нажимает соответствующие ключи 18 управления, сигнал от которых через кодер 19 команд управления и передатчик 17 направленного излучения преобразуется в направленное излучение, фиксирующееся приемником 10 направленного излучения секционного электро- блока 3. При этом направленность в зоне видимости может обеспечиваться ослаблением мощности передатчика и чувствительности приемника, т.е. таким образом может ограничиваться зона действия направленного излучения в случае отражения от соседних электроблоков и попадания на другие приемники до зоны видимости, ограниченной 8-10 секциями от оператора с носимым пультом. Сигнал от приемника 10 при наличии сигнала на втором управляющем вхо- де коммутатора 1 через второй информационный вход проходит через коммутатор 11, декодер 7 команд управления к электрогид- роклапанам 8, которые осуществляют подачу рабочей жидкости к соответствующим гидродомкратам секции крепи, секция начинает распор, передвижку, разгрузку, выдвигается козырек и т.д. Ограниченное действие направленного излучения позволяет га- рантироватть безопасность людей по всей оставшейся части лавы, так как секции вне зоны видимости оператора не могут управляться от носимого пульта. Ненаправленное излучение кроме того, что отключает ЦПУ, также и по каналу блока секции, на которой находится оператор, блокирует ее управление, тем самым обеспечивая требование безопасности о запрете управления секции, на которой находится оператор.
Величина зоны действия направленного излучения для каждого типа механизированной крепи выбирается отдельно, во всех слу- чаях она меньше, чем зона, где осуществляется надежный визуальный контроль за выполнением операций по передвижке секций, т.е. на более чем 5-8 секций. Зона ненаправленного излучения меньше, чем зона направленного излучения, определяется величиной больщей, чем щаг установки секции крепи или расстояние между приемниками блоков соседних секций, чтобы предотвратить случай, когда при нахождении оператора между секциями сигнал ненаправленного излучения не фиксировал бы ни один приемник секционных электроблоков. Тогда становится возможным управление с ЦПУ, что недопустимо, так как оператор находится в лаве. Зона действия ненаправленного излучения должна быть ограниченной, мень- щей, например, чем шаг установки 2-3 секций, чтобы запрет управления осуществлялся только на тех секциях, которые не
5
5
0 0
0 5
0
посредственно находятся в месте расположения оператора. Ненаправленное излучение представляет собой любое помехозащищен- ное в условиях очистного забоя, например, немодулированное электромагнитное излучение, инфракрасное (ИК) или радиоизлучение (РИ). Избирательное направленное излучение может также носить электройагнит- ную природу и быть реализовано различными способами. Например, адрес электроблока передается модулированной радиочастотой, а команда управления - ИК-мо- дулированным сигналом. Возможна также передача адреса секций и команды управления одновременно модулированным ИК-излу- чением. Различные частоты и уровни (мощность) передаваемых сигналов при этом являются характеристиками излучений, определяющих зоны их действия.
Целесообразность дистанционного беспроводного управления с носимого пульта определяется тем, что при этом повышается безопасность (управление происходит на удалении от объекта) и удобство управления, так как оператор не привязан непосредственно к секции и ее органам управления и может осупдествлять более качественный визуальный контроль. Во-вторых, резко упрощается конструкция секционных электроблоков. Наличие на каждом блоке до двадцати кнопок выбора режимов и операций управления секциями, т.е. наличие до 6 тыс. кнопок на блоках системы управления для трехсот секций крепи, значительно снижает надежность системы в целом.
Все блоки управления на секциях одинаковы, поэтому предпочтительным является применение лишь одного носимого пульта с теми же двадцатью кнопками. В-третьих, применение дистанционного автоматизированного управления в лаве расщиряет функциональные возможности системы, позволяет применять более сложные и эффективные алгоритмы управления крепью, повышает гибкость системы управления.
Формула изобретения
Устройство для автоматического управления механизированной крепью, содержащее центральный пульт управления, соединенный магистральной линией связи с секционными электроблоками, каждый из которых состоит из передатчика, состояния секции, выход которого подключен к магистральной линии свя-. зи, декодера команд управления, выход которого связан с электрогидроклапанами, приемника направленного излучения, декодера адреса электроблока, вход которого подключен к магистральной линии связи, приемника адреса секции, выход которого подключен к входу декодера адреса секции, и переносной пульт управления, содержащий ключи управления, подключенные к входам кодера команд управления, выход которого подключен к входам передатчика направленного излучения, ключи адреса секции, соединенные через кодер адреса секции с передатчиком адреса секции, и автономный источник питания, выходы которого подключены к входам всех блоков переносного пульта управления, отличающееся тем, что, с целью повышения надежности, каждый секционный электроблок устройства снабжен приемником ненаправленного излучения, коммутатором и блоком совпадения, а переносной пульт управления снабжен передатчиком ненаправленного излучения, причем в секционном
электроблоке выход декодера адреса электроблока подключен к первому, а выход приемника ненаправленного излучения - к второму управляющему входам коммутатора, выход которого соединен с входом декодера команд управления, выход приемника ненаправленного излучения подключен также к магистральной линии связи, с которой соединен также первый информационный вход коммутатора, выход блока совпадения подключен к второму информационному входу коммутатора, а выход автономного источника питания, в переносном пульте управления связан с входом передатчика ненаправленного излучения.
К магистральной
линии связи 2 л
От датчиков секции
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОЛ^АТИЗИРОВАННО ШАХТНОЙ КРЕПЬЮL ьИЬЛИО'''саА | 1972 |
|
SU356358A1 |
| Беспроводная самоорганизующаяся сетевая система мониторинга охраняемой территории | 2016 |
|
RU2620239C1 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ ОБЪЕКТОМ | 2013 |
|
RU2528790C1 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ | 2005 |
|
RU2303853C2 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ И ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2309064C1 |
| ЭЛЕКТРОБЛОК МЕХАНИЗИРОВАННОЙ КРЕПИ УГЛЕДОБЫВАЮЩЕГО КОМПЛЕКСА | 1990 |
|
RU2039246C1 |
| РЕНТГЕНОВСКИЙ АППАРАТ И СПОСОБ УПРАВЛЕНИЯ РЕНТГЕНОВСКИМ АППАРАТОМ | 2007 |
|
RU2418395C2 |
Изобретение относится к автоматическому управлению механизированной крепью угледобывающих комбайновых комплексов. Цель изобретения - повышение надежности работы устройства. Оно содержит центральный пульт управления (ЦПУ) 1, соединенный с секционными электроблоками (СЭБ) 3, и переносной пульт 4 управления. Каждый СЭБ 3 имеет приемники направленного и ненаправленного излучения (ННИ), коммутатор и блок совпадения, а каждый пульт 4 - передатчики направленного излучения и ННИ. При отсутствии оператора в лаве управление передвижением секций крепи осуществляется с ЦПУ 1. При появлении оператора в лаве ННИ, непрерывно передаваемое передатчиком ННИ, фиксируется приемником ННИ находящегося в зоне его воздействия СЭБ 3. Сигналом с этого приемника через коммутатор СЭБ 3 отключается ЦПУ 1, после чего оператор управляет с помощью направленного излучения любой секцией крепи в пределах видимости, кроме тех 2-3 секций, в зоне которых он находится сам. Этим обеспечивается безопасность находящегося в лаве персонала 3 ил. (Л JI 1 to со 00 оо с: фиг. 1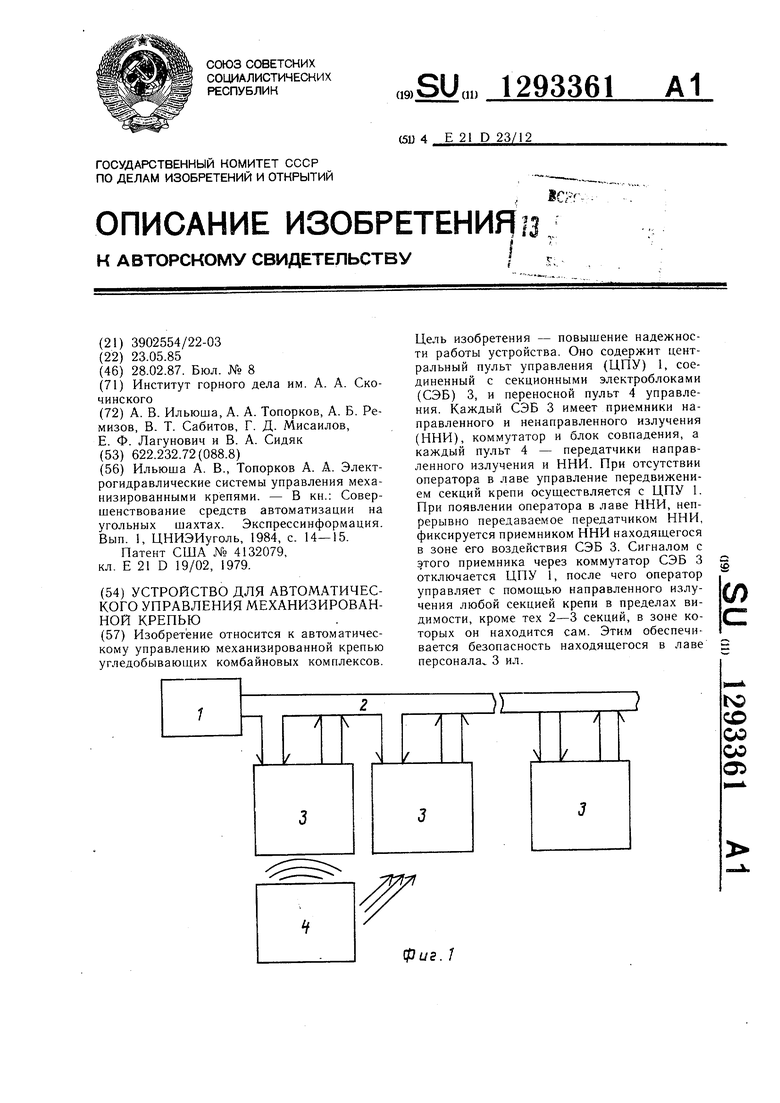
Редактор М. Недолуженко Заказ 360/35
Составитель ;Vi. Аксенов Техред И. ВересКорректор Д. Ильин
Тираж 455Подписное
ВНИИПИ Государствениого комитета СССР по делам изобретений и открытий
113035, Москва, Ж- 35, Раушская най, д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Ильюша А | |||
| В., Топорков А | |||
| А | |||
| Электрогидравлические системы управления механизированными крепями | |||
| - В кн.: Совершенствование средств автоматизации на угольных шахтах | |||
| Экспрессинформация | |||
| Вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Патент США № 4132079, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
