Изобретение относится к радиоэлектронным системам, обеспечивающим возможности комплексного решения задач охраны и определения текущего местоположения (позиционирования) транспортного средства (ТС).
Одной из первых примененных на практике систем этого класса является американская радиопоисковая система LO/JACK, предназначенная для поиска, обнаружения и перехвата ТС (Руководство по эксплуатации "Радиопоисковая система LO/JACK", Москва, 1998). В состав этой системы входят следующие основные узлы:
- приемоответчик, скрытно установленный на охраняемом ТС;
- несколько территориально разнесенных базовых станций, содержащих передатчик и установленную на вышке антенну;
- устанавливаемый на патрульных ТС быстрого реагирования трекер - радиопеленгационное устройство, включающее в себя четырехэлементную пеленгационную антенну с блоками компьютерной обработки и отображения информации о дальности и пеленге приемоответчика, находящегося на охраняемом ТС.
При установлении владельцем охраняемого ТС или другим лицом, имеющим право пользования охраняемым ТС (далее - пользователем), факта кражи или угона охраняемого ТС он обращается с заявлением (письменно или по телефону) в центр быстрого реагирования системы LO/JACK (диспетчерский центр) и/или в дежурную часть милиции. Оператор системы LO/JACK активирует установленный на охраняемом ТС приемоответчик путем посылки ему кодового сообщения с установленной на вышке базовой станции антенны передатчика. Приемоответчик включается и начинает посылать сигнал, по которому с ТС быстрого реагирования, оснащенных треке-рами, можно запеленговать охраняемое ТС. С этого момента оно рассматривается как угнанное ТС. После того как какой-либо из трекеров обнаружил и запеленговал работающий приемоответчик, начинается операция по преследованию и перехвату угнанного ТС (операция "капкан"). В ней участвуют несколько оборудованных трекерами патрульных ТС быстрого реагирования (специализированного подразделения милиции). Трекеры пеленгуют источник излучения. Руководствуясь их показаниями и сведениями, получаемыми с помощью штатных радиостанций от других экипажей и/или из диспетчерского центра, патрульные ТС быстрого реагирования постепенно стягивают кольцо захвата вокруг угнанного ТС.
LO/JACK относится к радиопоисковым системам централизованного типа, то есть к системам, в состав которых входит диспетчерский центр, осуществляющий сбор информации и управление перехватом угнанного ТС.
Недостатками радиопоисковой системы LO/JACK, которые характерны и для других подобных систем, являются:
1. Наличие сравнительно высокой абонентной платы за пользование услугами системы.
2. Высокая начальная стоимость системы, обусловленная большими капитальными затратами, связанными с развертыванием базовых станций и диспетчерского центра.
3. Высокая мощность излучения базовых станций, которая может повлиять на условия электромагнитной совместимости в зоне действия системы.
На устранение указанных недостатков направлено техническое решение по патенту RU №2179121, В60R 25/00. Представленная в нем система включает в себя приемник, передатчик и процессор для хранения кодированной информации об охраняемом ТС и стационарные передатчики, установленные на улично-дорожной сети. В качестве стационарных передатчиков используются маломощные передатчики с возможностью излучения индивидуального кодированного сигнала, а в качестве передатчика охраняемого ТС используется передатчик сотовой сети подвижной связи, действующей в данном регионе. При этом процессор программируется так, чтобы он был способен поочередно фиксировать индивидуальный код каждого из стационарных передатчиков и передавать его вместе с кодированной информацией об охраняемом ТС через сотовую сеть подвижной связи на компьютер центра управления силами быстрого реагирования.
Недостатками указанной системы являются сложность ее развертывания и уязвимость по отношению к умышленным помехам сотовым сетям подвижной связи.
На упрощение системы и повышение ее помехозащищенности направлено техническое решение по патенту RU №2266217, В60R 25/10, G08В 25/10, являющееся ближайшим аналогом настоящего изобретения. В нем описана информационно-навигационная система для обнаружения и перехвата угнанных ТС, содержащая установленный на борту охраняемого ТС абонентский комплекс, который содержит абонентский приемопередающий модуль, выполненный с возможностью приема и передачи по радиоэфиру сигналов сотовой сети подвижной связи, микроконтроллер, связанный с абонентским приемопередающим модулем и выполненный с возможностью приема извещений из блока охранных извещателей и передачи команд блокирования движения охраняемого ТС на его исполнительные устройства. Система содержит также абонентский передатчик, который подключен к одному из выходов микроконтроллера и выполнен с возможностью излучения на псевдослучайной скачкообразно перестраиваемой несущей частоте кодовых посылок, содержащих информацию о категории сообщения и коды идентификационных признаков охраняемого ТС. В состав системы входят, кроме того, установленные на борту ТС быстрого реагирования поисковые комплексы, каждый из которых содержит поисковый приемопередающий модуль, подключенный к сотовой сети подвижной связи, и блок приема кодовых посылок, выполненный с возможностью приема по радиоэфиру на псевдослучайной скачкообразно перестраиваемой несущей частоте кодовых посылок от абонентского передатчика. При этом в абонентский комплекс входит абонентский блок спутниковой навигации (GPS-приемник), выход которого подключен к дополнительному входу микроконтроллера, выполненного с возможностью преобразования данных спутниковой навигации в формат кодовой посылки, излучаемой абонентским передатчиком, и в формат кодовой посылки, излучаемой абонентским приемопередающим модулем. В каждый поисковый комплекс введены блок преобразования формата данных, первый вход которого подключен к выходу блока приема кодовых посылок, а второй - к выходу поискового приемопередающего модуля, и персональный навигатор, выполненный с возможностью приема и обработки сигналов глобальной спутниковой навигации, определения требуемого направления движения и оставшегося расстояния до точки местонахождения угнанного ТС и отображения указанных параметров на лицевой панели персонального навигатора, при этом вход последнего подключен к выходу блока преобразования формата данных.
В абонентском комплексе абонентский передатчик выполнен с возможностью излучения в радиоэфир кодовых посылок на псевдослучайной скачкообразно перестраиваемой несущей частоте - так называемого hopping-сигнала (Л.М.Невдяев. "Телекоммуникационные технологии". Англо-русский толковый словарь-справочник, М.: Связь и бизнес, 2002, с.195) с сообщениями, несущими информацию о категории сообщения, коды идентификационных признаков охраняемого ТС и данные GPS-приемника.
В каждом поисковом комплексе блок приема кодовых посылок представляет собой приемник hopping-сигнала, выполненный с возможностью селекции в кодовых посылках информации о категории сообщения, идентификационных признаках охраняемого ТС и данных GPS-приемника.
Принципы работа и варианты практической реализации охранной аппаратуры, использующей hopping-сигнал, достаточно подробно описаны в ранее полученных предприятием-заявителем патентах, например, RU №2244959, В60R 25/10, G08В 25/10, G08В 29/16, RU №2265250, G08В 25/08, G08C 15/00, RU №2278415, G08В 25/10, G08В 29/12, Н04В 1/713.
Настоящее изобретение направлено на упрощение аппаратурной реализации и повышение надежности работы ближайшего аналога в условиях, когда комплексная задача охраны и позиционирования ТС решается не глобально, а в некоторой ограниченной зоне. Это могут быть случаи оставления ТС на лесной дороге, в незнакомом городском квартале, вне поля видимости на открытой местности. Для краткости будем называть это задачей локального позиционирования.
Предметом изобретения является система тревожной сигнализации и локального позиционирования ТС, содержащая установленный на борту охраняемого ТС возимый комплекс, в состав которого входят микроконтроллер, охранные извещатели, соединенные со входами микроконтроллера, исполнительные устройства, выполненные с возможностью блокирования движения ТС, подключенные к управляющим выходам микроконтроллера, и возимый передатчик hopping-сигнала с генератором опорной частоты и возимой передающей антенной, подключенный к сигнальному выходу микроконтроллера, а также находящийся у пользователя носимый комплекс, в состав которого входят носимая антенна, носимый приемник hopping-сигнала и персональный навигатор, подключенный первым входом к первому выходу носимого приемника hopping-сигнала и выполненный с последовательно соединенными вычислителем азимута и блоком индикации, второй вход которого является первым входом персонального навигатора, - при этом в возимый комплекс введен радиодальномер с возимой приемной антенной, опорный вход которого подключен к выходу псевдослучайной частоты возимого передатчика hopping-сигнала, а выход - к дополнительному входу микроконтроллера, а в носимый комплекс введены передатчик-ретранслятор hopping-сигнала, антенный коммутатор, связанный с носимой антенной, выполненной приемопередающей, и датчик азимута, связанный с носимой приемопередающей антенной, при этом вход передатчика-ретранслятора hopping-сигнала подключен ко второму выходу носимого приемника hopping-сигнала, вход антенного коммутатора соединен с выходом передатчика-ретранслятора hopping-сигнала, а выход подключен ко входу носимого приемника hopping-сигнала, выход датчика азимута подключен ко второму входу персонального навигатора, причем последний снабжен электронным компасом, подключенным выходом к первому входу вычислителя азимута, второй вход которого является вторым входом персонального навигатора.
Частными существенными признаками изобретения являются следующие.
Радиодальномер возимого комплекса включает в себя последовательно соединенные возимый приемник hopping-сигнала с возимой приемной антенной, фазометр, второй вход которого соединен со входом возимого приемника hopping-сигнала и является опорным входом радиодальномера, и масштабирующий усилитель, выход которого является выходом радиодальномера, предназначенным для подключения к дополнительному входу микроконтроллера.
Носимый приемник hopping-сигнала выполнен с возможностью извлечения из состава носимого комплекса и снабжен встроенными приемной антенной и генератором звуковых сигналов.
Задачей настоящего изобретения является создание системы тревожной сигнализации и локального позиционирования ТС, отличающейся от ближайшего аналога более высокой надежностью в работе и более простой в практической реализации.
Обеспечиваемый технический результат заключается в достижении в ограниченной (локальной) зоне точности позиционирования ТС, позволяющей пользователю выйти к ТС, не имея при себе GPS-приемника, в том числе в условиях высокой концентрации в указанной зоне источников мешающего излучения.
Суть изобретения поясняется на фиг.1-6.
Фиг.1 иллюстрирует общий принцип действия рассматриваемой системы.
На фиг.2 представлена структурная схема носимого комплекса.
На фиг.3 представлена структурная схема персонального навигатора.
На фиг.4 показан пример изображения на жидкокристаллическим индикаторе (ЖКИ) блока индикации.
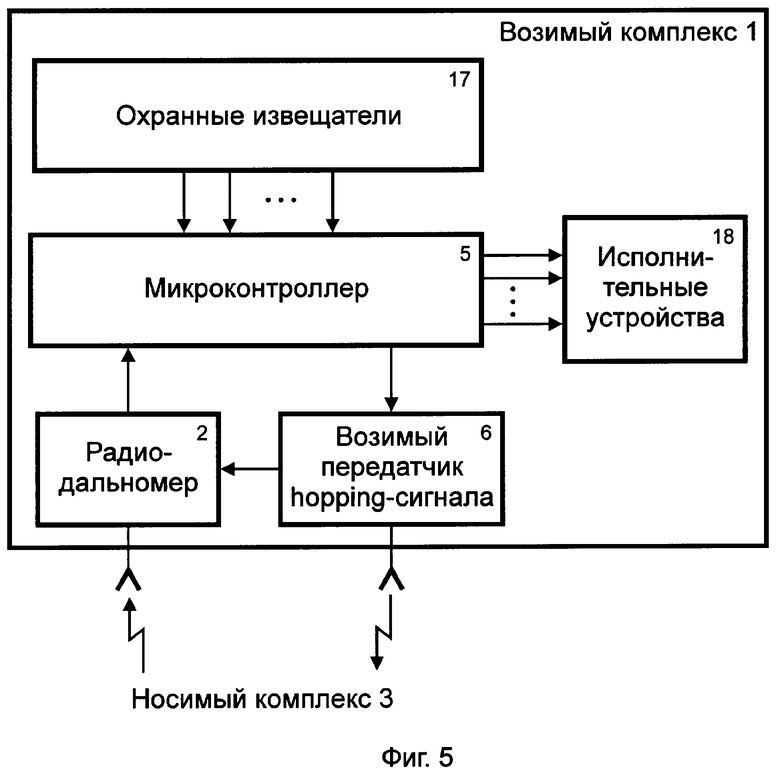
На фиг.5 представлена структурная схема возимого комплекса.
На фиг.6 представлена структурная схема радиодальномера.
На фиг.1-6 использованы следующие обозначения: 1 - возимый комплекс; 2 - радиодальномер; 3 - носимый комплекс; 4 - датчик азимута; 5 - микроконтроллер; 6 - возимый передатчик hopping-сигнала; 7 - антенный коммутатор; 8 - носимый приемник hopping-сигнала; 9 - передатчик-ретранслятор hopping-сигнала; 10 - возимый приемник hopping-сигнала; 11 - фазометр; 12 - масштабирующий усилитель; 13 - персональный навигатор; 14 - электронный компас; 15 - вычислитель азимута; 16 - блок индикации; 17 - охранные извещатели; 18 - исполнительные устройства.
Рассматриваемая система тревожной сигнализации и локального позиционирования ТС содержит установленный на борту охраняемого ТС возимый комплекс 1 (фиг.5), в состав которого входят микроконтроллер 5, ко входам которого подключены охранные извещатели 17, к дополнительному входу - радиодальномер 2 с приемной антенной, а к выходам - исполнительные устройства 18, выполненные с возможностью блокирования движения ТС. В состав возимого комплекса 1 входит, кроме того, возимый передатчик 6 hopping-сигнала с возимой передающей антенной. При этом опорный вход радиодальномера 2 подключен к выходу псевдослучайной частоты возимого передатчика 6 hopping-сигнала.
Рассматриваемая система содержит также находящийся у пользователя носимый комплекс 3 (фиг.2), содержащий носимый приемник 8 hopping-сигнала, первый выход которого подключен к первому входу персонального навигатора 13, передатчик-ретранслятор 9 hopping-сигнала, антенный коммутатор 7, связанный с носимой приемопередающей антенной, которая связана также с датчиком 4 азимута, выход которого подключен ко второму входу персонального навигатора 13. Вход антенного коммутатора 7 соединен с выходом передатчика-ретранслятора 9 hopping-сигнала, а выход подключен ко входу носимого приемника 8 hopping-сигнала.
В состав персонального навигатора 13 (фиг.3) входят последовательно соединенные электронный компас 14, вычислитель 15 азимута, второй вход которого является вторым входом персонального навигатора 13, и блок 16 индикации, второй вход которого является первым входом персонального навигатора 13.
Рассматриваемый вариант реализации радиодальномера 2 (фиг.6) представляет собой последовательно соединенные возимый приемник 10 hopping-сигнала с возимой приемной антенной, фазометр 11, второй вход которого соединен со входом возимого приемника 10 hopping-сигнала и является опорным входом радиодальномера 2, и масштабирующий усилитель 12, выход которого является выходом радиодальномера 2, предназначенным для подключения к дополнительному входу микроконтроллера 5.
Входящий в состав носимого комплекса 3 (фиг.2) носимый приемник 8 hopping-сигнала содержит, помимо высокочастотного тракта, быстродействующий аналого-цифровой преобразователь и цифровой процессор быстрого преобразования Фурье. Носимый приемник 8 hopping-сигнала выполнен с возможностью селекции в кодовых посылках информации о категории сообщения, идентификационных признаках ТС и о расстоянии до цели. Подобный носимый приемник 8 hopping-сигнала реализован предприятием-заявителем (в виде опытных образцов) в НИОКР "Карнет-3" и успешно прошел натурные испытания. Принципы работы носимого приемника 8 hopping-сигнала подробно описаны, например, в описаниях изобретений к патентам DE №4337211 G08В 25/10, G08В 29/00, G08C 15/00, Н04В 7/24, ЕР №0651361, G08В 25/10, RU №2228860, В60R 25/00, G08B 25/10.
Носимый приемник 8 hopping-сигнала может быть выполнен с возможностью извлечения из состава носимого комплекса 3. В этом случае он должен быть снабжен встроенными приемной антенной и генератором звуковых сигналов.
Передатчик-ретранслятор 9 hopping-сигнала реализован в опытном образце, разработанном предприятием-заявителем и прошедшем заводские испытания. Его описание приведено, например, в патенте RU №2264937, В60R 25/00, G08В 25/08, ранее полученном предприятием-заявителем.
Используемые в носимом комплексе 3 датчик 4 азимута и антенный коммутатор 7 являются стандартными радиоэлектронными устройствами, описанными в справочной литературе.
Что касается персонального навигатора 13 (фиг.3), то варианты его построения могут быть различными. В простейшем случае персональный навигатор 13 представляет собой поисковый приемник с направленной антенной и наушниками. Путем поворота антенны и оценки громкости звука в наушниках пользователь определяет направление на ТС и движется в этом направлении. Оставшееся расстояние до ТС оценивается, например, по частоте прослушиваемых в наушниках звуковых сигналов. Для более точных измерений может быть использован навигационный прибор (навигатор) с ЖКИ, подобный широко известному и доступному на коммерческом рынке навигатору "Garmin GPS 38" (www.badger.ru). далее, для краткости, GPS 38.
Такой навигатор отличается простотой и удобством в эксплуатации благодаря стрелочному (по типу магнитного компаса) методу отображения направления движения на цель.
Показанный на фиг.4 пример изображения на ЖКИ вышеупомянутого GPS 38 обеспечивает режим движения к ТС кратчайшим путем. Аналогичная картинка может быть использована и в предлагаемой системе с локальным позиционированием пользователя относительно ТС.
Входящие в состав возимого комплекса 1 (фиг.5) охранные извещатели 17, микроконтроллер 5 и исполнительные устройства 18 используются в большинстве систем охранной сигнализации, серийно выпускаемых предприятием-заявителем. Указанные системы представлены в рекламных материалах предприятия-заявителя, в частности, в каталоге "Автомобильные охранные системы", М.: ООО "Альтоника", 2005, выпуск 8. Семейство этих систем описано также в ряде патентов, полученных предприятием-заявителем: RU №2228542, В60R 25/00, G01C 21/24, G01C 21/26, RU №2228862, В60R 25/00, G08B 25/10.
Возимый комплекс 1 включает в себя действующий образец возимого передатчика 6 hopping-сигнала RS-30T, типовые элементы охранно-противоугонных комплексов семейств BLACK BUG® и REEF® (микроконтроллер 5, охранные извещатели 17 и исполнительные устройства 18), серийно выпускаемые предприятием-заявителем (каталог "Автомобильные охранные системы", М.: ООО "Альтоника", 2005, выпуск 8), и стандартный радиодальномер.
Возимый передатчик 6 hopping-сигнала RS-30T реализуется на базе серийно выпускаемой аппаратуры радиоканальной охранной сигнализации "REEF STRING" RS-202 (сертификаты соответствия РОСС RU.ME96.H00513 и ССПБ RU.OП019.H00259), защищенной патентами RU №2231458, В60R 25/00, В60R 25/10, G08C 13/00 и RU №2228861, В60R 25/00, G08B 25/10.
Фазометр 11 является составной частью обычного фазового дальномера с модуляцией несущей (В.Б.Пестряков, В.Д.Кузенков. "Радиотехнические системы", М.: Радио и связь, 1985).
В качестве масштабирующего усилителя 12 используется операционный усилитель.
Таким образом, все используемые в предлагаемой системе узлы известны и доступны на коммерческом рынке. Соответственно возможность практической реализации предлагаемой системы не вызывает сомнений.
Возможны различные сценарии использования рассматриваемой системы тревожной сигнализации и локального позиционирования ТС.
Система может использоваться, так же как и ближайший аналог, в режиме охранно-противоугонной системы.
В этом случае возимый комплекс 1 начинает автоматически излучать в эфир в том случае, когда произошло несанкционированное воздействие на ТС. Структура излучаемого при этом сигнала приведена ниже и определяется требованиями режима тревожной сигнализации.
Возимый комплекс 1 может использоваться так же, как реперная излучающая точка, относительно которой пользователь измеряет свое местоположение, оставив, например, ТС на дороге в лесу. Наличие этого режима определяет основные отличия предлагаемой системы от ближайшего аналога.
Выйдя из ТС, пользователь активирует излучение возимого комплекса 1 в эфир вручную. Параметры излучения соответствуют при этом режиму пеленгации реперной точки. В том случае, если (как это указано ниже) в отсутствие пользователя произошло несанкционированное воздействие на ТС, возимый комплекс одновременно выполняет как охранно-противоугонную функцию, так и роль реперной точки.
Сценарий использования возимого комплекса 1 предлагаемой системы в роли реперной точки иллюстрируется на фиг.1. Как было отмечено выше, предлагаемая система реализует техническое решение, альтернативное широко известному способу глобального позиционирования. Средства спутниковой навигации в системе отсутствуют, а измерение местоположения пользователя осуществляется в относительной системе координат "пользователь - ТС". Причем речь идет о локальном позиционировании, то есть об определении местоположения на расстояниях между пользователем и ТС, не превышающих нескольких километров. По аналогии с GPS-системами глобального позиционирования - системы этого класса называют системами локального позиционирования LPS (например, материалы на сайте www. deuteron.ru).
За начало системы координат, в которой осуществляется измерение, принимается в данном случае точка расположения пользователя ТС. Пользователь определяет азимут направления на реперную точку, роль которой играет ТС, а расстояние до ТС измеряется с помощью установленного в возимом комплексе 1 (фиг.5) радиодальномера 2 (фиг.6) и передается в носимый комплекс 3 (фиг.2).
Азимут направления на ТС измеряется аналогично тому, как это делается спортсменом, ищущим "передатчик-лису" в соревнованиях "охота на лис" - с помощью носимого комплекса 3, на приемопередающей антенне которого установлен датчик 4 азимута.
В возимом комплексе 1 (фиг.5) по командам, поступающим из микроконтроллера 5, возимый передатчик 6 hopping-сигнала излучает кодированные посылки реперного hopping-сигнала. При каждом излучении этой кодированной посылки реперного hopping-сигнала возимый передатчик 6 hopping-сигнала псевдослучайно выбирает для передачи одну из допустимых несущих частот передачи.
Примером возможной структуры излучаемой кодовой посылки реперного hopping-сигнала является следующая:
- МАРКЕР (общий для всех посылок реперного hopping-сигнала данной системы набор символов);
- АДРЕС (набор символов, определяющий возимый передатчик 6 hopping-сигнала, сформировавший кодовую посылку реперного hopping-сигнала);
- РАССТОЯНИЕ (набор символов, определяющий расстояние между ТС и пользователем - формируется только после получения рассмотренного ниже переизлученного hopping-сигнала);
- КОНТРОЛЬНАЯ СУММА (набор контрольных символов).
Эти посылки принимаются приемопередающей антенной носимого комплекса 3 (фиг.2) и через антенный коммутатор 7 передаются в носимый приемник 8 hopping-сигнала. Носимый приемник 8 hopping-сигнала для каждой из допустимых частот передачи проверяет наличие структуры МАРКЕРА. При обнаружении ее на какой-либо допустимой частоте носимый приемник 8 hopping-сигнала проверяет совпадение АДРЕСА с запомненным при программировании кодом АДРЕСА комплектного возимого передатчика 6 hopping-сигнала. Если эти коды совпадают, то носимый приемник 8 hopping-сигнала начинает анализировать код РАССТОЯНИЯ.
Если вид кода РАССТОЯНИЯ соответствует некоторому начальному коду, формируемому возимым передатчиком 6 hopping-сигнала при отсутствии приема переизлученного hopping-сигнала, то носимый приемник 8 hopping-сигнала игнорирует этот код. Случай приема кода РАССТОЯНИЯ, отличного от начального кода, будет рассмотрен ниже.
При анализе полученной посылки носимый приемник 8 hopping-сигнала вырабатывает КОНТРОЛЬНУЮ СУММУ и сравнивает ее с КОНТРОЛЬНОЙ СУММОЙ, принятой в составе реперного hopping-сигнала. При совпадении этих КОНТРОЛЬНЫХ СУММ принятый реперный hopping-сигнал подается из носимого приемника 8 hopping-сигнала на модулирующий вход передатчика-ретранслятора 9 hopping-сигнала, который через антенный коммутатор 7 и приемопередающую антенну переизлучает реперный hopping-сигнал в эфир на той же несущей частоте, на которой он был послан возимым передатчиком 6 hopping-сигнала.
Переизлученный hopping-сигнал принимается возимой приемной антенной радиодальномера 2 (фиг.6) и подается на вход возимого приемника 10 hopping-сигнала. Несущая частота принимаемого переизлученного hopping-сигнала сигнала задается при этом сигналами опорной частоты возимого передатчика 6 hopping-сигнала. Она должна совпадать с той несущей частотой, на которой возимый передатчик 6 hopping-сигнала перед этим вел передачу кодовой посылки реперного hopping-сигнала.
С выхода возимого приемника 10 hopping-сигнала принятый сигнал поступает на вход фазометра 11, на второй вход которого подается указанный выше сигнал опорной частоты с выхода возимого передатчика 6 hopping-сигнала. В фазометре 11 осуществляется сравнение двух этих сигналов, в результате чего определяется их разность фаз, которая прямо пропорциональна расстоянию между пользователем и ТС. Значение указанного расстояния определяется с помощью масштабирующего усилителя 12 и подается на дополнительный вход микроконтроллера 5, выполненного с возможностью введения в очередную посылку реперного hopping-сигнала, излучаемого возимым передатчиком 6 hopping-сигнала, кода РАССТОЯНИЯ (отличного от начального кода).
Излученный реперный hopping-сигнал принимается приемопередающей антенной носимого комплекса 3 (фиг.2) и через антенный коммутатор 7 подается на вход носимого приемника 8 hopping-сигнала, как уже было рассмотрено выше. В носимом приемнике 8 hopping-сигнала осуществляется селекция кода информации РАССТОЯНИЯ между пользователем и ТС. Теперь код РАССТОЯНИЯ отличается от начального кода. С первого выхода носимого приемника 8 hopping-сигнала информация РАССТОЯНИЯ подается на первый вход персонального навигатора 13 (фиг.3). На второй вход персонального навигатора 13 поступает код, характеризующий азимутальный угол поворота плоскости приемопередающей антенны носимого комплекса 3, относительно заранее выбранного опорного направления. Электронный компас 14, входящий в состав персонального навигатора 13, позволяет определить направление на север. С учетом известного угла поворота опорного направления относительно направления на север в вычислителе 15 азимута определяется азимут направления на ТС и азимут направления движения пользователя. Для этого пользователь должен поворачивать плоскость приемопередающей антенны носимого комплекса 3 таким образом, чтобы принимаемый сигнал достиг бы максимума. Указанный максимум фиксируется в блоке 16 индикации путем пороговой обработки сигнала, поступающего с первого выхода носимого приемника 8 hopping-сигнала на второй вход блока 16 индикации.
В блоке 16 индикации азимут и расстояние между пользователем и ТС отображаются на дисплее (фиг.4) подобно тому, как это делается в вышеупомянутом навигаторе GPS 38 (www.badger.ru).
Таким образом, описанная выше процедура поиска ТС и определения местоположения ТС относительно пользователя аналогична процедуре поиска "передатчика-лисы", используемой в известных соревнованиях "охота на лис" (например, www.urfiwz.gr.ru).
Отличительной особенностью предлагаемой процедуры является то, что при ее реализации используется сложный помехозащищенный реперный hopping-сигнал, обеспечивающий надежное местоопределение ТС даже при наличии в зоне приема большого числа посторонних источников излучения. При этом задача дальнометрии решается на борту ТС - в возимом комплексе 1, обладающем большими возможностями по обеспечению аппаратуры питанием, чем носимый комплекс 3. Это позволяет существенно снизить массу и стоимость носимого комплекса 3.
При этом в заявляемой системе сохраняется характерная для ближайшего аналога охранно-противоугонная функция при попытках несанкционированного воздействия на ТС. Эта функция реализуется автоматически в тех случаях, когда пользователь оставляет ТС, например, для покупки чего-либо в магазине.
При несанкционированном воздействии на охраняемое ТС, например, при попытке угона или кражи, установленные на борту ТС охранные извещатели 17, входящие в состав возимого комплекса 1 (фиг.5), передают в микроконтроллер 5 тревожные сигналы (извещения). Микроконтроллер 5 селектирует каждое такое извещение, подает команду включения возимого передатчика 6 hopping-сигнала и формирует соответствующую тревожную кодовую посылку для возимого передатчика 6 hopping-сигнала.
Возимый передатчик 6 hopping-сигнала переносит эту тревожную кодовую посылку на несущую частоту, скачкообразно перестраиваемую по псевдослучайному закону, и излучает сформированную таким образом тревожную кодовую посылку hopping-сигнала в эфир.
Примером возможной структуры излучаемой тревожной кодовой посылки hopping-сигнала является следующая:
- МАРКЕР (общий для всех тревожных кодовых посылок hopping-сигнала данной системы набор символов);
- ПРИЗНАК (символы, указывающие на категорию сообщения; в данном случае категорией сообщения является "Тревожная кодовая посылка hopping-сигнала");
- АДРЕС (набор символов, определяющий возимый передатчик 6 hopping-сигнала, сформировавший тревожную кодовую посылку hopping-сигнала);
- ИНФОРМАЦИЯ (набор символов, конкретизирующий охранный извещатель 17, срабатывание которого вызвало формирование тревожной кодовой посылки, а также тип срабатывания этого охранного извещателя 17);
- КОНТРОЛЬНАЯ СУММА (набор контрольных символов).
Формирование hopping-сигнала, несущего тревожную кодовую посылку, осуществляется с помощью известной процедуры, описанной в ряде изобретений предприятия-заявителя (например, в патентах: RU №2228275, B60R 25/10, G08B 25/10, G08В 29/16, RU №2228274, В60R 25/00, RU №2231458, В60R 25/00, В60R 25/10, G08C 13/00).
В том случае, если перед несанкционированным воздействием возимый комплекс 1 использовался в качестве реперной точки, то после несанкционированного воздействия на ТС сформированный тревожный hopping-сигнал примет тот же носимый комплекс 3 (фиг.2), который до этого принимал реперный hopping-сигнал. Тревожный hopping-сигнал поступает от приемопередающей антенны через антенный коммутатор 7 в носимый приемник 8 hopping-сигнала, который селектирует тревожную кодовую посылку с указанными выше атрибутами и передает ее на второй вход персонального навигатора 13 (фиг.3). Конструктивно этот вход является вторым входом блока 16 индикации, входящего в состав персонального навигатора 13. Принятый тревожный hopping-сигнал преобразуется в требуемый формат блоком 16 индикации и отображается на ЖКИ. При этом формируется звуковой и/или световой сигнал, привлекающий внимание пользователя и призывающий его возвращаться к оставленному ТС. После этого тревожные hopping-сигналы будут передаваться повторно, чередуясь с посылками реперного hopping-сигнала.
Получив тревожное извещение о несанкционированном воздействии на ТС, микроконтроллер 5 возимого комплекса 1 (фиг.5) формирует, кроме команды, подаваемой на возимый передатчик 6 hopping-сигнала, также и команду блокирования движения ТС. Указанная команда поступает на исполнительные устройства 18, которые блокируют двигатель ТС (например, в качестве исполнительных устройств 18 может быть использован иммобилайзер). Блокирование двигателя ТС существенно усложняет задачу угонщику и при наличии у пользователя носимого комплекса 3 дает возможность пользователю быстрее выйти к месту нахождения ТС. Продвижение к ТС осуществляется пользователем с использованием показанного на фиг.4 изображения на ЖКИ блока 16 индикации.
Изображение на ЖКИ указанного типа позволяет контролировать параметры отклонения от предварительно заданного прямого пути движения к ТС. В верхней части изображения указываются азимут направления на ТС (BRG), оставшееся расстояние до него (DST), азимут направления движения (TRK) и скорость движения по прямой (SPD). В нижней части изображения указываются расчетное время в пути (ЕТЕ) и рекомендуемая скорость (VMG).
В процессе движения к ТС в центре изображения на ЖКИ условно отображается прямая "дорога", как бы "проложенная" к ТС. Большая стрелка под изображением "дороги" показывает истинный курс относительно прямого направления на ТС. Для поддержания правильного курса необходимо постоянно совмещать указанную стрелку с черным ромбиком на шкале графического индикатора. При приближении к ТС на "дороге" появляется условное изображение "финишной черты". Когда изображение "финишной черты" дойдет до нижнего обреза изображения "дороги", то это означает, что цель достигнута, то есть ТС находится где-то рядом и возможен визуальный контакт с ТС.
После визуального контакта с ТС пользователь имеет возможность быстро, не демаскируя себя, оценить ситуацию, что это было: либо ложная тревога, либо попытка ограбления (кражи). При обнаружении внутри ТС злоумышленников пользователь может, не приближаясь к ТС, позвонить по мобильному телефону в ближайшую дежурную часть милиции, сделав соответствующее заявление и указав на характерные ориентиры того места, где находится ТС.
То есть достаточно простыми техническими средствами комплексно решается задача охраны ТС и позиционирования пользователя в локальной зоне.
Необходимо отметить, что несанкционированное воздействие может произойти и на ТС, в котором возимый комплекс 1 не был предварительно переведен в режим излучения кодированных посылок реперного hopping-сигнала (например, при нахождении ТС на стоянке около места службы пользователя). Если в распоряжении пользователя при этом находится носимый комплекс 3, то работа системы повторяет рассмотренную выше (после несанкционированного воздействия на охраняемое ТС). При этом в рамках настоящего изобретения не рассматривается вопрос о том, по какому сигналу возимый комплекс 1 переходит от посылок тревожных hopping-сигналов к чередованию их с посылками реперного hopping-сигнала. Вариантов таких сигналов может быть много, например, сигнал начала движения ТС (от датчика движения, если такой датчик входит в состав возимого комплекса 1).
Однако иметь при себе носимый комплекс 3 может быть не всегда удобно для пользователя. Это достаточно громоздкая аппаратура, которую неудобно, например, брать с собой в магазин. Поэтому носимый приемник 8 hopping-сигнала может быть выполнен с возможностью извлечения из состава носимого комплекса 3. Условно такая возможность показана на фиг.2 в виде пунктирной линии, окружающей носимый приемник 6 hopping-сигнала.
Такой отдельный носимый приемник 8 hopping-сигнала, снабженный встроенными приемной антенной и генератором звуковых сигналов, представляет собой малогабаритный блок, который пользователь вполне может носить при себе, например, в кармане пиджака. Входящая в состав носимого приемника 8 hopping-сигнала встроенная приемная антенна позволяет принимать сигналы от возимого передатчика 6 hopping-сигнала на небольшом расстоянии (около сотни метров). Встроенный генератор звуковых сигналов включается при приеме тревожного hopping-сигнала от комплектного возимого комплекса 1. Звуковые сигналы встроенного генератора звуковых сигналов должны привлечь внимание пользователя, чтобы он успел подойти к ТС и проверить, каким именно несанкционированным воздействиям оно подвергается. Как было указано выше, при обнаружении внутри ТС злоумышленников пользователь может, не приближаясь к ТС, позвонить по мобильному телефону в ближайшую дежурную часть милиции, сделав соответствующее заявление.
Таким образом, предлагаемое техническое решение позволяет решить поставленную задачу настоящего изобретения - создать систему тревожной сигнализации и локального позиционирования, отличающуюся от ближайшего аналога более высокой надежностью работы в локальной зоне и меньшей стоимостью аппаратуры, являющейся более простой в практической реализации.
Обеспечиваемый технический результат заключается в обеспечении в ограниченной (локальной) зоне таких же возможностей по позиционированию, как при совместном использовании GPS-приемника и системы сотовой подвижной связи, с сохранением при этом функции тревожной сигнализации о несанкционированном воздействии на ТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СИСТЕМА ДЛЯ МОНИТОРИНГА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2007 |
|
RU2337406C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
| РАДИОСИГНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, ОБЪЕКТОВ НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2231458C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2201363C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ОБЪЕКТОВ НЕДВИЖИМОСТИ, ТРАНСПОРТНЫХ СРЕДСТВ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2216463C1 |




Изобретение относится к радиоэлектронным системам, обеспечивающим возможности комплексного решения задач охраны и определения текущего местоположения (позиционирования) транспортных средств (ТС). На борту охраняемого ТС установлен возимый комплекс, в состав которого входят микроконтроллер, охранные извещатели, исполнительные устройства, возимый передатчик hopping-сигнала с возимой передающей антенной и радиодальномер с возимой приемной антенной. Охранные извещатели соединены со входами микроконтроллера, а радиодальномер - с дополнительным входом микроконтроллера. Исполнительные устройства подключены к управляющим выходам микроконтроллера и выполнены с возможностью блокирования движения ТС. Опорный вход радиодальномера подключен к выходу псевдослучайной частоты возимого передатчика hopping-сигнала. У пользователя находится носимый комплекс, в состав которого входят антенный коммутатор с носимой приемопередающей антенной, носимый приемник hopping-сигнала, передатчик-ретранслятор hopping-сигнала, персональный навигатор и датчик азимута. Персональный навигатор подключен первым входом к первому выходу носимого приемника hopping-сигнала. Вход передатчика-ретранслятора hopping-сигнала подключен к выходу носимого приемника hopping-сигнала, а выход - ко входу антенного коммутатора, выход которого соединен со входом носимого приемника hopping-сигнала. Датчик азимута связан с носимой приемопередающей антенной и подключен ко второму входу персонального навигатора. Персональный навигатор выполнен с последовательно соединенными электронным компасом, вычислителем азимута и блоком индикации. Технический результат заключается в достижении в ограниченной (локальной) зоне точности позиционирования ТС, позволяющей пользователю выйти к ТС, не имея при себе GPS-приемника, в том числе в условиях высокой концентрации в указанной локальной зоне источников мешающего излучения. 2 з.п. ф-лы, 6 ил.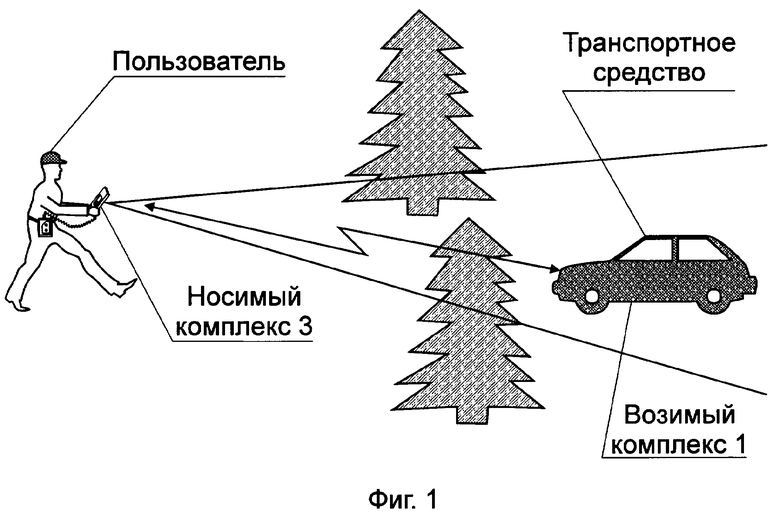
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СИСТЕМА ОПЕРАТИВНОГО СЛЕЖЕНИЯ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2179121C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2155684C1 |

