1
Изобретение относится к измерительной технике и может быть использовано для контроля изделий, имеющих прерывистую винтовую поверхность, например червячных фрез.
Цель изобретения - повышение точности контроля за счет исключения влияния на результат измерения погрешностей преобразователя линейных микроперемещений и исключения формирования ложных команд на вьпсоде формирователя командных сигналов.
На чертеже.приведена блок-схема устройства для -контроля изделий с прерывистой винтовой поверхностью.
Устройство содержит шпиндель 1, на которьш устанавливается контролируемое изделие 2, преобразователь 3 угловых перемещений, измерительную каретку 4 с закрепленньм на пей измерительным наконечником 5, несущую каретку 6, преобразователь линейных перемещений- в виде линейки 7 и блока
8считывания, размещенного на измерительной каретке 4, преобразователь
9линейных никроперемещений, размещенный на несущей каретке 6, с измерительным наконечником 10, связан- ;ным с измерительной кареткой 4, упругий элемент 11, связывающий каретки
4 и 6, ключ 12, формирователь 13 командных сигналов, выход которого подключен к управляющему входу ключа, привод 14 несущей каретки, блок 15
5
10
15
12934782
мерительной каретки 4 определяет только поверхнос гью контролируем изделия, с которой взаимодейству закрепленньш на каретке 4 измери ный наконечник 5. Затем приводят шпьндель 1 во вращение с заданно угловой скоростью. При этом сигн с преобразователя 3 угловых пере ний и задатчика 16 поступают в б 17, где в зависимости от, угла по рота шпинделя и шага винтовой ли вычисляется заданное перемещение ретки 6. В тот же блок 17 поступ сигнал блока 8 считывания преобр вателя линейных перемещений, кот в этом блоке вычитается из ранее численного заданного перемещения и на выходе блока 17 формируется нал рассогласования заданных и и ненных перемещений каретки 4, ко характеризует отклонение контрол емой поверхности от теоретическо Этот сигнал поступает на блок 19 гистрации через ключ 12, а также используется для управления прив 14. Командный сигнал, открывающи ключ 12, формируется на выходе ф мирователя 13 при экстремальном з нии выходного сигнала блока 17, тупающего на вход формирователя Этот экстремальный сигнал характ зует отклонение положения точки жущей кромки от заданной винтово нии и, таким образом вырабатывае
20
25
30
управления приводом, задатчик 16 шага формирователе 13 сигнал отсечки винтовой линии, блок 17 рассогласования перемещений измерительной каретки, первый вход которого подключен к выходу задатчика 16, второй вход - к блоку 8 считывания, а третий - к выходу преобразоват еля 3, блок 18 рассогласования перемещений несущей каретки, первый вход которого подключен к выходу блока 17, второй вход - к выходу преобразователя 9, а выход - к входу блока 15 управления приводом, и блок 19 рег:истрации, подключенный через ключ 12 к выходу блока 17,
Устройство работает следующим об- азом.
На шпиндель 1 устанавливают контролируемое изделие 2, измерительный наконечник 5 вводят в контакт с боковой стороной профиля изделия 2 и -набирают начальный натяг (смещение каретки 4 относительно левого упора) путем поворота издeJшя 2 или смещения каретки 6. При этом положение изкромки.
Использование выходного сигна блока 17 для управления приводом осуществляется посредством блока в котором из выходного сигнала б ка 17 производится вычитание вых го сигнала преобразователя 9, и выходе блока 18 формируют сигнал рактеризующий отклонение положен каретки 6 от заданного, т.е. рас ласование привода 14. Упомянутый 1ле начальный натяг задают заведо большим, чем максимально возможн рассогласование привода 14, что печивает контакт измерительного конечника 5 с контролируемой пов ностью.
50
55
Формула и -3 обретен
Устройство для контроля издел с прерывистой винтовой поверхнос содержащее шпиндель, преобразова
5
10
15
2934782
мерительной каретки 4 определяется только поверхнос гью контролируемого изделия, с которой взаимодействует закрепленньш на каретке 4 измерительный наконечник 5. Затем приводят шпьндель 1 во вращение с заданной угловой скоростью. При этом сигналы с преобразователя 3 угловых перемещений и задатчика 16 поступают в блок 17, где в зависимости от, угла поворота шпинделя и шага винтовой линии вычисляется заданное перемещение каретки 6. В тот же блок 17 поступает сигнал блока 8 считывания преобразователя линейных перемещений, который в этом блоке вычитается из ранее вычисленного заданного перемещения, и на выходе блока 17 формируется сигнал рассогласования заданных и исполненных перемещений каретки 4, который характеризует отклонение контролируемой поверхности от теоретической. Этот сигнал поступает на блок 19 регистрации через ключ 12, а также используется для управления приводом 14. Командный сигнал, открывающий ключ 12, формируется на выходе формирователя 13 при экстремальном значении выходного сигнала блока 17, поступающего на вход формирователя 13. Этот экстремальный сигнал характеризует отклонение положения точки режущей кромки от заданной винтовой линии и, таким образом вырабатывает в
20
25
30
а формирователе 13 сигнал отсечки ,
формирователе 13 сигнал отсечки
кромки.
Использование выходного сигнала блока 17 для управления приводом-14 осуществляется посредством блока 18, в котором из выходного сигнала блока 17 производится вычитание выходного сигнала преобразователя 9, и на выходе блока 18 формируют сигнал, ха- рактеризующий отклонение положения каретки 6 от заданного, т.е. рассогласование привода 14. Упомянутый вы- 1ле начальный натяг задают заведомо большим, чем максимально возможное рассогласование привода 14, что обеспечивает контакт измерительного наконечника 5 с контролируемой поверхностью.
50
55
Формула и -3 обретения
Устройство для контроля изделий с прерывистой винтовой поверхностью, содержащее шпиндель, преобразователь
угловых перемещений, связанный со шпинделем, измерительную каретку с закрепленным на ней измерительным наконечником, несущую каретку, на которой установлена с возможностью перемещения измерительная каретка, упругий элемент, связывающий несущую и измерительную каретки, преобразователь линейных перемещений в виде линейки и блока считывания, преобразо- ватель линейных микроперемещений, установленный на несущей каретке, измерительный наконечник которого связан с измерительной кареткой, привод несущей каретки, блок управления приводом несущей каретки, задатчик шага винтовой линии, блок рассогласования перемещений измерительной каретки, первый вход которого подключен к выходу задатчика шага винтовой ли- НИИ, блок рассогласования несущей каретки, формирователь командных сиг
Редактор М.Товтин
Составитель А. Николаев
Техред Л.Сердюкова Корректор И. Эрдейи
Заказ 370/41
Тираж 678Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.,д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
налов, ключ, управляющий вход которого соединен с выходом формирователя командных .сигналов, и блок регистрации, связанный через ключ с выходом блока рассогласования перемещений, измерительной каретки, отличающееся тем, что, с целью повышения точности контроля, блок считывания преобразователя линейных перемещений размещен на измерительной каретке и соединен с вторым входом блока рассогласования перемещений измерительной каретки, третий вход которого соединен .с выходом преобразователя угловых перемещений, а выход - с входом формирователя командных сигналов и с первым входом блока рассогласования перемещений несущей каретки, второй вход которого подклю-- чен к выходу преобразователя линейных микроперемещений, а выход - к входу (блока управления приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля изделий с винтовой поверхностью | 1985 |
|
SU1298523A1 |
| Прибор для контроля изделий с винтовой поверхностью | 1976 |
|
SU581369A1 |
| Устройство для контроля изделий с винтовой поверхностью | 1981 |
|
SU1013745A1 |
| Автоматическое измерительное устройство для контроля профиля объектов | 1986 |
|
SU1328665A1 |
| Прибор для контроля изделий с винтовой поверхностью | 1975 |
|
SU513241A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| Бесконтактный измерительный прибор | 1985 |
|
SU1268374A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Задатчик микроперемещений | 1987 |
|
SU1513421A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля изделий с прерывистой винтовой поверхностью. Повышение точности контроля достигается тем, что блок считывания 8 преобразователя линейных перемещений размещен на измерительной каретке 4, которая связана с несущей кареткой-6 посредством упругого элемента 11. При этом в блоке 17 рассогласования перемещений измерительной каретки вырабатывается измерительный сигнал, не зависящий от;нестабильности перемещения и рывков несущей каретки 6. 1 ил. (Л с &0 4 ЭО 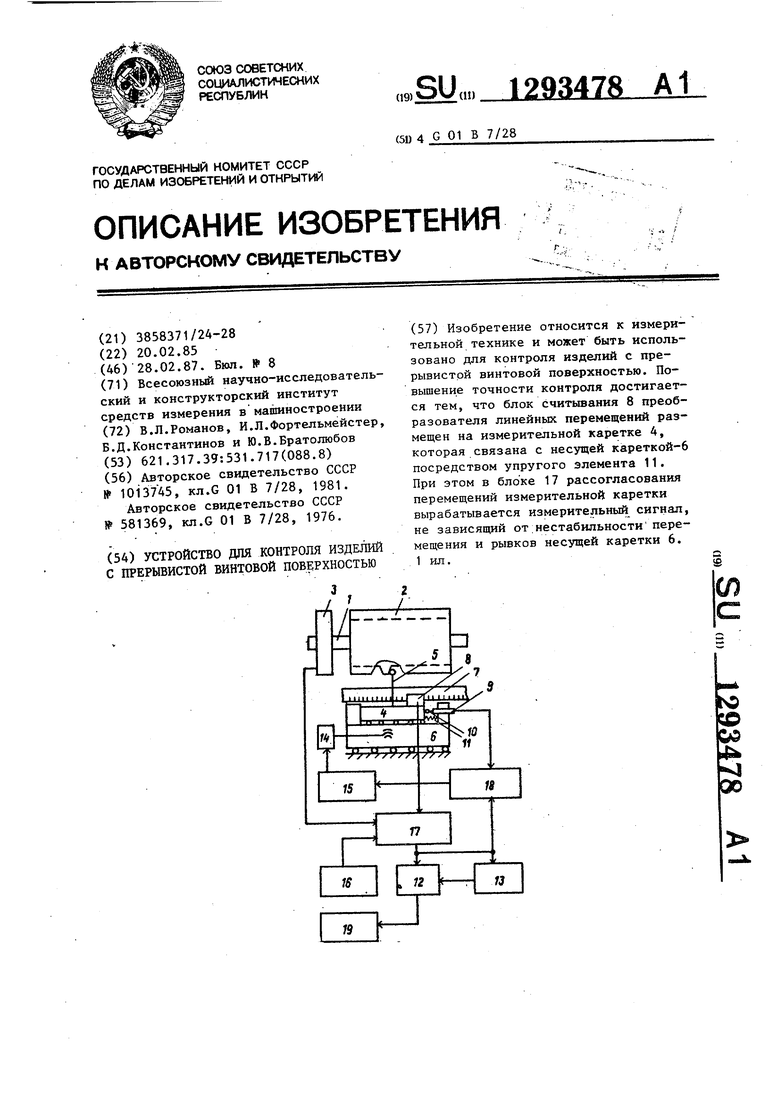
| Устройство для контроля изделий с винтовой поверхностью | 1981 |
|
SU1013745A1 |
| Прибор для контроля изделий с винтовой поверхностью | 1976 |
|
SU581369A1 |
