1
Изобретение относится к контролю изделий в машиностроении, & именно контролю прецизионных червяков, червячных «йрез, винтов и других изделий с винтовой поверхностью, в том числе с прерывистой.
Известен прибор для контроля изделий с винтовой поверхностью, содержащий шпиндель для установки контролируемого изделия, каретку, связанную со шпинделем фрикционным механизмом настройки, и индикатор,установленный на каретке и контактирующий с коитролируемым изделием.
Прибор работает следующим образом. Каретка посредством фрикционного механиэма получает от шпинделя перемещение в приближенном соответствии с з аконом образования винтовой линии изделия. Индикатор показывает отклонение контролируемого пе- ремещение винтовой линии от образцового, создаваемого 4чзикционным механизмом.
Недостатками этого прибора являются низкая производительность связанная со сложностью настройки механизма на требуемый шаг контролируемого изделия, и низ-
коя т очность вследствие наличия большого числа механических элементов.;
Существует также прибор для автоматн ческого коитроля пэделяй с винтовой поверх ностью, содержащий каретку с иаконечннком, контактирующим с контролвруемой поверх- : ностью винта, сиабженную подвижным элементом датчика линейных перемещений, угла повороти контролируемого изделия и регистрато р отклонений от согласованно-, сти линейных перемещений каретки и угловЬ1Х перемещений изделия (см. авт. св. СССР N 263174 кл. С 01Ь 7/28 1968 г.).
Прибор работает следующим образом.
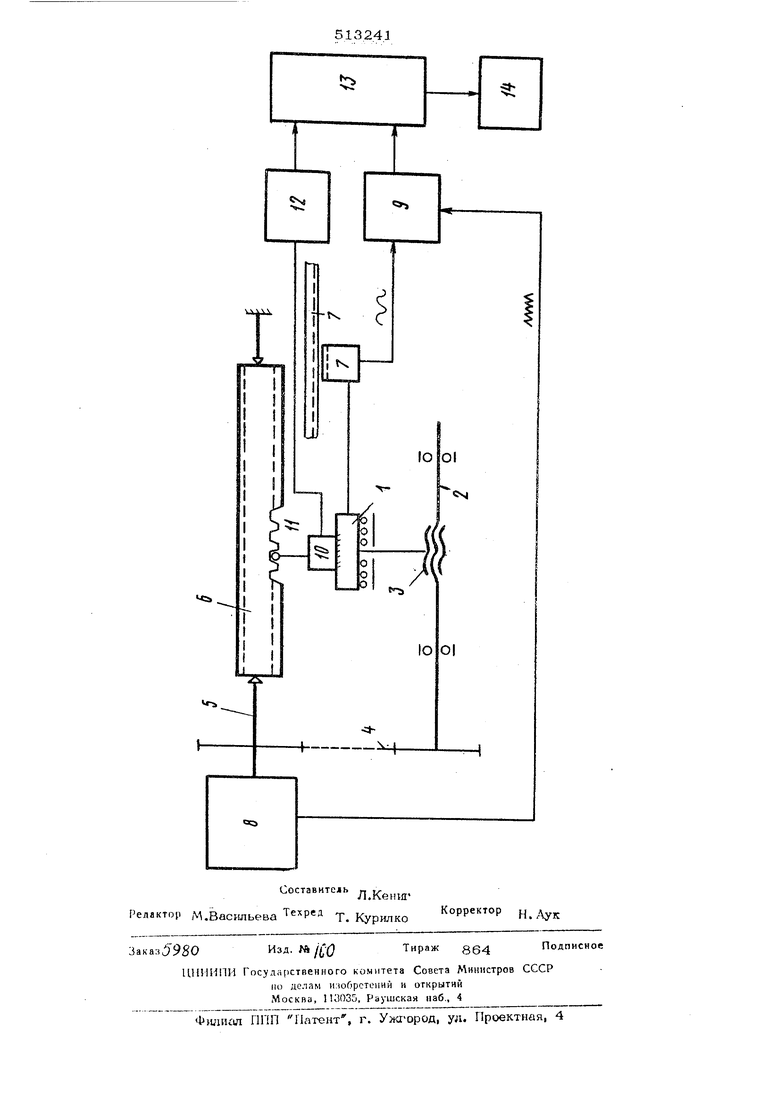
В процессе контроля датчик угла выдает первичную информацию от угла поворота ; изделия и соответствующем ему теоретическом линейном перемещении образующей винтовой линии. Действительное перемещение каретки, определяемое реальным изделиемi контактирующим с накоиечником каретки контролируется датчиком линейных перемещений, сравнивается с теоретическим, а результат сравнения в виде отклонений выво дится на регистратор. Данное устройство является наиболее близким к изобретению по технической сущности и flOCTHraeMONfy эффект . Однако этот прибор обладает следующими недостатками: подача тяжелой каретки параллельно оси контролируемого изделия, поводком, контактирующим с винтовой лини связана с переменными деформациями винт в зоне контакта, вызванными колебанием сопротивления перемещению, что приводит снижению точности измерений; разрешаю- шая спрсобность прибора, т. е. способность подробно выявлять погрешность винта огра ничена числом контрольных точек на единицу длины линейного перемещения; отсутствует возможность контроля прерывистых поверхностей, характерных, например, для червячных фраз и шеверов, Целью изобретения является повышение точности и подробности измерений и соз дание возможности контроля прерывистых винтовых поверхностей пу.тем улучшения структуры прибора. Это достигается тем, что прибор снабж винтовой передачей, ходовой винт которой кинематически связан со шпинделем издели , а на гайке винта закреплена нзме:рительна каретка. Перемещениекаретки осуществляется данной винтовой передачей в приближе ном соответствии с законом образовения винтовой линии изделия. На каретке установлен датчик микроперемешений, взаимодействующий СБОИМ ощупывающим наконечн ком с винтовой поверхностью контролируемого изделия. Выход системы контроля микропереме- щений подключен к одному: из входов сумматора, второй вход которого связан с вы ходом системы контроля согласованности перемещений. Выход сумматора соединен с регистратором, фиксирующим погрешность изделия. На чертеже показана блок-схема прибора, содержащего каретку 1, механизм подачи каретки 1 с винтом 2, гайкой 3 н зубчатой гитарой 4, шпиндель 5, на котором установлено контролируемое изделие 6 датчик линейных перемещений 7. датчик угловых перемещений 8, измерительное ус ройство 9 CHCTGNfbi контроля согласованности перемещений, датчик микролорел-геше- HHii Ю с чувствительным элементом 11, -.измерительное устройство 12 систе;ч№1 кон роля М11кропереме 1:.ений, сумматор 13 и регистратор 14. Прибор работает следуюшим образом. baiJOTKa 1 пе|земо1;1аетсп NiexaniraMONt ПОД-1Ч11 в приб.-щжениэм соответствии с закои: м ,-1лглзпп11-я BHIITUII:- H линии поделил Данное соответствие устанавливается с помощью механизма подачи с винтом 2, гайкой 3 и зубчатой гитарой 4. Датчики линейных 7 и угловых 8 перемещений выдают сигналы на измерительное устройстве 9, которое формирует сигнал отклонений, суммируемый с сигналом измерительного устройства 12 в сумматоре 13. Выходной сигнал сумматора 13 фиксируется регист ратором 14 в виде осциллограммы. Повышение точности измерений в данной ; конструкции прибора обеспечивается за счет постоянного и малого по величике усилияв точке контакта ощупывающего наконечника с винтовой поверхностью. В зоне разрьша винтовой поверхности наконечник проваливается, система контроля согласованности перемещений продолжает работать, а запись погрешности изделия прерывается до момента восстановления контакта наконечника с винтовой линией изделия. Технико-экономическая эффективность предлагаемого изобретения состоит в повышении стабильности процесса ощупывания винтовой поверхности изделия,обеспечении контроля винтовой поверхности с высокой степенью подробности выявления функции погрешности изделия и возможности контроля изделий с прерывистой винтовой поверхно стью, Формула изобретения Прибор для контроля изделий с винтовой поверхностью, содержащий шпиндель для установки контролируемого изделия, каретку, линейный и круговой измерительные преобразователи системы контроля согласованности углового перемещения шпинделя и линейного перемощения каретки, установленные соответственно на каретке и на шпинделе, и записывающее устройство, о т л и ч а ющ и и с я тем, что, с целью повышения точности и подробности измерения и обеспечсг.ия контроля прерывистых поверхностей,, он снабжен винтовой парой, винт которой кинематически связан со шпинделем, а ia гайке винта закреплена каретка, измеритель- преобразователем мпкронеремещений, установл1.нным на каретке и в,заимодействую- шим своим oи ynывaюlIU наконечником с винтовой лэперхностью контролируемого изделия, cyNSMaTopOM, один из входов которого включен )ia выход viGNTeprrrcuibiioro преобразователя микроперемощений, а другой - яа ВЫХО.П. смстем) контроля согласовакнчХ;ти перемещений, .а выход cyNJMaTopa подключен к оаги1сыв:1КЭ1иему устройству.

| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля ходовых винтов станков | 1981 |
|
SU986613A1 |
| Прибор для контроля изделий с винтовой поверхностью | 1976 |
|
SU581369A1 |
| Устройство для контроля изделий с винтовой поверхностью | 1981 |
|
SU1013745A1 |
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
| Устройство для контроля изделий с винтовой поверхностью | 1985 |
|
SU1298523A1 |
| Прибор для контроля изделий с винтовой поверхностью | 1984 |
|
SU1245858A1 |
| Устройство для контроля изделий с прерывистой винтовой поверхностью | 1985 |
|
SU1293478A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ПРОДОЛЬНОЙ линии ЗУБЦАКОЛЕСА | 1972 |
|
SU353127A1 |
| Прибор для контроля и разметки гребных и т.п. винтов | 1945 |
|
SU68379A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ФОРМЫ и РАСПОЛОЖЕНИЯ КОНТАКТНОЙ ЛИНИИ КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1972 |
|
SU356445A1 |