дается на фазовращатель 7, соединенный с инвертором-повторителем 8, где по сигналам с блока 4 сравнения фаз задается прямое или обратное смещение. Усилитель 9 мощности передает усиленный на вибровозбудитель 10, управляющий вибрацией
1
Изобретение относится к балансировочной технике и может быть использовано в прецизионном приборостроении.
. Цель изобретения - повьш1ение точности и производительности балансировки за счет автоматической подстройки амплитуды и фазы корректирующего воздействия,
На фиг.1 представлена блок-схема устройства; на фиг.2 - схема блока сравнения; на фиг.З - различные случаи процесса балансировки,
Устройство содержит измеритель дисбаланса, вьтолненный в виде датчика 1 дисбаланса и смонтированного усилителя 2, соединенные последовательно с селективным усилителем 2, выпрямитель 3, блок 4 сравнения, реверсивный счетчик 5 цифроаналоговой преобразователь 6, фазовращатель 7 инвертор-повторитель 8, усилитель 9 мощности, вибровозбудитель 10 с эк- раном 11. Выход селективного усилителя 2 соединен с сигнальным входом фазовращателя 7, Выход выпрямителя 3 последовательно соединен с компаратором 12, токовым ключом 13, блоком 14 питания, оптическим квантовым генератором (ОКГ)15. Выход блока 4 сравнения соединен с управляю- mjiM входом инвертора-повторителя 8, Вход реверсивного счетчика 5 последовательно соединен с делителем 17 частоты.с задающим генератором 16. Вход делителя 17 частоты соединен с . выходом переключателя 18 коэффициента деления частоты.
Луч ОКГ 15 направлен на фиксирующую линзу 19 и фокусируется последней на поверхности балансируемого
экрана 1-1, периодически перекрывающего луч лазера 15. При достижении допустимого уровня дисбаланса блок 14 питания лазера 15 отключается от сигнала токового ключа 13, срабатывающего от компаратора 12. 1 з.п. ф-лы 3 ил.
5
0
5
0
5
0
ротора 20, находящегося в балансировочной раме (не показана).
Сигнал на блок 4 сравнения поступает через две последовательно соединенные линии 21, 22 задержки на инвертирующий, а через линию 23 задержки - на неинвертирующие входы дифференциального усилителя 24. Ин-( вертирующий вход дифференциального усилителя 24 связан с неинвертирующим входом дифференциального усилителя 25, Инвертирующий вход дифференциального усилителя 25 соединен с кеинвертирующим входом дифференциального усилителя 26 и входом блока 4 сравнения, Инвертирующий вход дифференциального усилителя 26 соединен с неинвертирующим входом дифференциального усилителя 24. Неинвертирующий и инвертирующий входы дифференциального усилителя 27 соединены соответственно с выходом дифференциального усилителя 24 и 25. Входы формирователей 28 и 29 сигналов соединены с выходами дифференциальных Усилителей 27 и 26 соответственно, Напряжения, вьщаваемые с выходов формирователей сигналов 28 и 29, являются выходами блока 4 сравнения.
Устройство работает следующим образом.
При настройке экран 11 выставляют так, чтобы при нулевом сигнале с датчика 1 дисбаланса он полностью перекрывал луч ОКГ 15. Ротор 20 устанавливают в балансировочную раму и разгоняют до частоты балансировки.
За счет неуравновешенности ротора 20 рама начинает колебаться. Колебания воспринимаются датчиком 1 дисбаланса, усиливаются селективным усили
телем 2, подаются на сигнальный вход фазовращателя 7, который. изменяет Фазу выходного сигнала по отношению к входному сигналу в зависи- мости от напряжения на управляющем входе.
С фазовращателя 7 сигнал поступает на инвертор-повторитель 8, производящий инверсию фазы входного сигнала на 180 в зависимости от направ ления изменения величины дисбаланса Увеличение значения дисбаланса ба- лансируемого ротора 20 указыва,ет на то, что съем массы с ротора происходит в области легкого места. В этом случае с выхода блока 4 сравнения сигнал поступает на управляющий вход инвертора-повторителя 8 и проис . ходит инверсия фазы входного сигнала При дальнейшей обработке ротора 20 дисбаланс уменьшается, так как съем массы производится в области тяжелого места. Сигнал с инвертора-ловтори теля 8 поступает на усилитель 9 мощности, который усиливает сигнал для управления вибровозбудителем 10 с. экраном 11,
Управление фазовращателем 7 происходит следуюи1 1м образом.
Допустим, в процессе работы уст- ройства экран 11 движется так, что. уровень сигнала дисбаланса начинает уменьшаться, Напряжение на выходе выпрямителя 3 также уменьшается. С выхода выпрямителя 3 сигнал поступа- ет на вход блока 4 сравнения, где он обрабатывается и выдается сигнал О или 1 в зависимости от величины скорости уменьшения дисбаланса на вход реверсивного счетчика 5. О подается на вход реверсивного счетчика 5 в случае максимальной скорости уменьщения дисбаланса, а I - в противном.
На второй вход подаются импульсы
через делитель 17 частоты и переключатель 18 коэффициента деления с генератора 16 Реверсивный счетчик 5 начинает работать в режиме прямого счета (при наличии О на входе) или обратного счета Гпри наличии 1 на входе). На выходе реверсивного счетчика 5 происходит изменение цифровых данных в двоичном ко- де. Эти цифровые данные с выхода реверсивного счетчика 5 поступают на вход цифроаналогового преобразователя 6, преобразующего входные цифровы
5
з
О 5 0
5
данные в пропорциональные аналоговые уровни. Выходной сигнал с выхода цифроаналогового преобразователя 6 поступает на вход управления фазовращателем 7 и последний в свою очередь изменяет разность фаз входного и.выходного сигналов.
При уменьшении значения дисбаланса до определенной величины на выходе выпрямителя 3 срабатывает компаратор 12, Сигнал 1 подается на вход -токового ключа 13.
Токовый ключ 13 переходит в другое устойчивое состояние. Сигнал с выхода токового ключа 13 отключает блок 14 питания заслонки лазера и генерация ОКГ 15 срывается. Это служит сигналом окончания балансировки, т,е. уменьшения значения дисбаланса ротора 20 до определенной величины (например, допуска на динамическую балансировку).
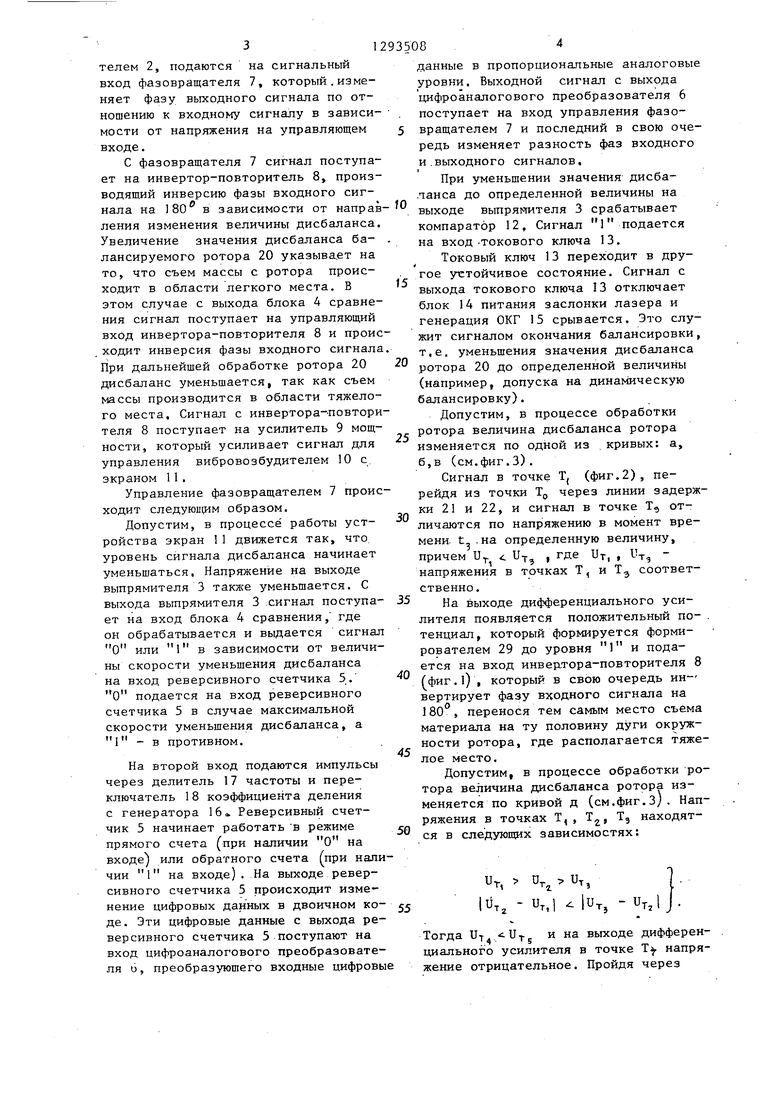
Допустим, в процессе обработки ротора величина дисбаланса ротора изменяется по одной из кривых: а, б,в (см.фиг.3).
Сигнал в точке I (фиг.2), перейдя из точки Тр через линии задержки 21 и 22, и сигнал в точке Т, отличаются по напряжению в момент времени, t .на определенную величину, причем г и-г, , где UT, , 14, - напряжения в точках Т, и Т соответственно.
На выходе дифференциального усилителя появляется положительный по- . тенциал, который формируется формирователем 29 до уровня 1 и подается на вход инвер.тора-повторителя 8 f фиг. l) , который в свою очередь ин- вертирует фазу входного сигнала на 180°, перенося тем самым место съема материала на ту половину дуги окружности ротора, где располагается тяжелое место.
Допустим, в процессе обработки ротора величина дисбаланса ротора изменяется по кривой д (см.фиг.З), Напряжения в точках Т,, Т, Т, находятся в следуюпщх зависимостях:
Ur, Ог,и„ Ит, - UT,I lUrj - UT.I J.
ч.
Тогда Uf.UT- и на выходе дифферен- циальног о усилителя в точке Т напряжение отрицательное. Пройдя через
формирователь 28, напряжение
О
на
его выходе соответ(;твует U. Из точки Т„ напряжение с уровнем О
ig напряжение с уровнем ;подается на вход реверсивного счётчика 5 (фиг.1).
С выхода реверсивного счетчика 5 изменяющийся сигнал в сторону уменьшения в виде двоичного кода поступает на вход цифроанапогового преобразователя 6. Преобразованный сигнал проходит на вход управления фазовращателем 7, изменяющего разность фаз входного и выходного сигналов , чтобы место съема материала сближались с тяжелым местом на iJoTOp
В случае, когда величина дисба- ланса ротора изменяется по кривой ж (см,фиг.З) , напряжения в точках Т , Т, Т находятся в следующих зависимостях:
и и.
Uv.
- Un
Тогда и. U-p и на выходе дифференциального усилителя 27 в точке T-j, напряжение положительное. Пройдя через формирователь 28, напряжение на его выходе будет соответствовать 1. Из точки Т напряжение с уровнем 1 подается на вход реверсивно- го счетчика 5 (см.фиг.1).
С выхода реверсивного счетчика 5 изменяющийся сигнал в сторону увеличения в виде двоичного кода поступает на вход цифроанало- гового преобразователя 6, Преобразованный сигнал приходит на вход управления фазовращателем 7, изменяющего разность фаз входного и выходного сигналов так, чтобы место съема материала сближалось с тяжелым местом на роторе.
Формула изобретения
, 1. Устройство для динамической балансировки роторов, содержащее балансировочную раму, измеритель дисбаланса, соединенный .с рамой, оптический квантовый генератор с блоком питания, оптическую систему, фокусирующую луч оптического квантового- генератора, фазовращатель, усилитель мощности и вибровозбудитель с установленным на нем экраном, подключенный к выходу усилитель мощности, отличающееся тем.
что, с целью повышения точности и производительности балансировки, устройство снабжено соединенными последовательно с измерителем дисбалан- 5 са выпрямителем, блоком сравнения, реверсивным счетчиком и цифроаналого- вым преобразователем, выход которого соединен с сигнальным входом фазо- i вращателя, инвертором-повторителем, , вход которого соединен с выходом фазовращателя, а выход - с входом 1 усилителя мощности компаратора, вход которого соединен с выходом выпрямителя, токовым ключом, вход которого соединен с выходом компаратора, а выход - с входом блока пи0
5
0
5
тания,. делителем частоты, выход которого соединен с управляющим входом реверсивного счетчика, задающим генератором и переключателем, подключенными к соответствующим входам делителя частоты, выход измерителя дисбаланса соединен с сигнальным входом фазовращателя., а второй выход блока сравнения,- с управляющим входом инвертора - повторите- |ля.
2. Устройство по п., отличающееся тем, что блок сравнения выполнен в виде двух соединяющих последовательно линий задержки, вход первой из которых представляет собой вход блока сравнения, третьей линии задержки, вход которой соеди-- нен с входом первой линии задерзкки первого, второго, третьего и четвертого дифференциальных усилителей, неинвертирующий вход первого из них и инвертирующий вход третьего соединены с выходом второй линии задержки, инвертирую1ций вход первого и не- инвертирующий вход второго - с выхо5 дом третьей линии задержки, инвертирующий вход второго и неинвертирующий вход третьего - с входом первой линии задержки, а выходы первого и второго неинвертируюпщм и инвертирующим входами четвертого и двух формирователей сигналов, выход четвертого дифференциального усилителя соединен с первым формирователем сигналов, вькод которого представляет со-.
С бой первый выход блока сравнения, а выход третьего - с входом второго формирователя сигналов, выход которого представляет собой второй выход блока сравнения.
0
0
ю-сю
фцг. 2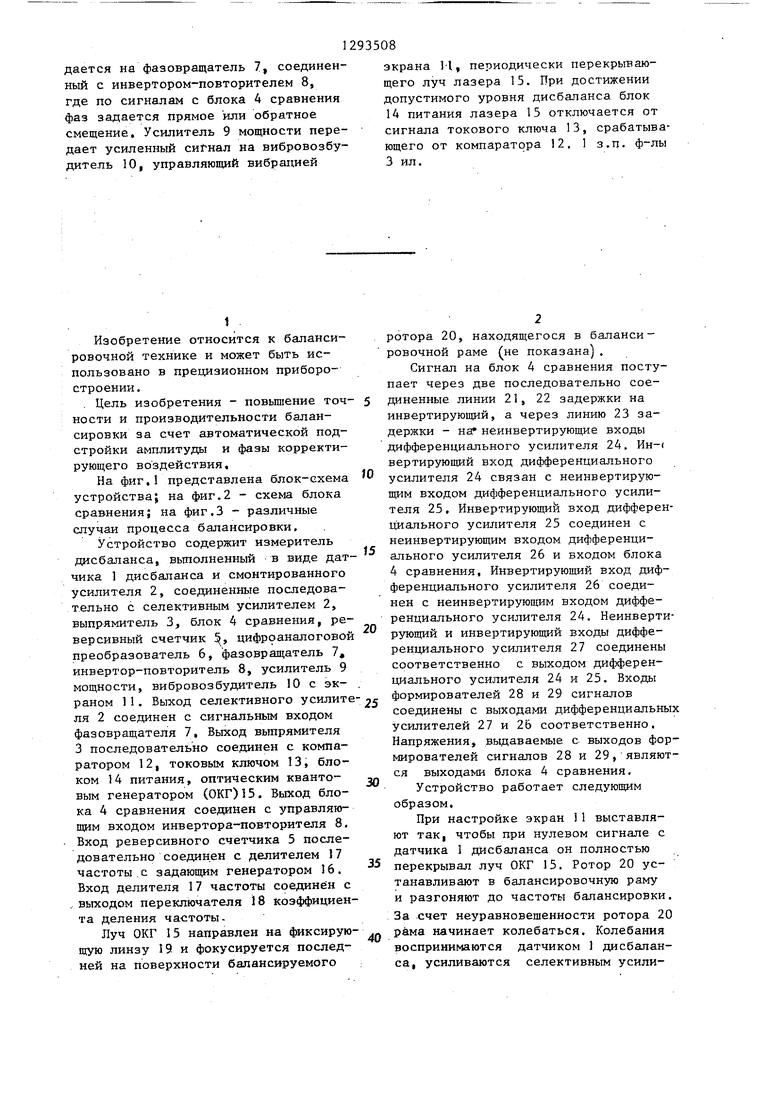
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрическое устройство | 1987 |
|
SU1525441A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1978 |
|
SU746227A2 |
| Устройство для статической балансировки роторов | 1984 |
|
SU1186980A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Автоматическое балансирующее устройство | 1985 |
|
SU1293505A1 |
| ФОРМИРОВАТЕЛЬ ТРЕХФАЗНЫХ ГАРМОНИЧЕСКИХ СИГНАЛОВ | 2014 |
|
RU2553418C1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU911187A2 |
| Электропривод | 1988 |
|
SU1656652A1 |
| РЕГЕНЕРАТОР ОДНОФАЗНОГО НАПРЯЖЕНИЯ СЕТИ | 2014 |
|
RU2549166C1 |
Изобретение относится к балансировочной технике и может быть использовано в прецизионном приборостроении. Цель изобретения - повьппе- ние точности и балансировки за счет автоматической подстройки амплитуды и фазы корректирующего воздействия. Устройство содержит датчик I дисбаланса, сигнал которого поступает на блок 4 сравнения, где определяется скорость изменения дисбаланса. Реверсивный счетчик 5 выдает сигнал с частотой, задаваемой задающим генератором 16, этот сигнал поо (Л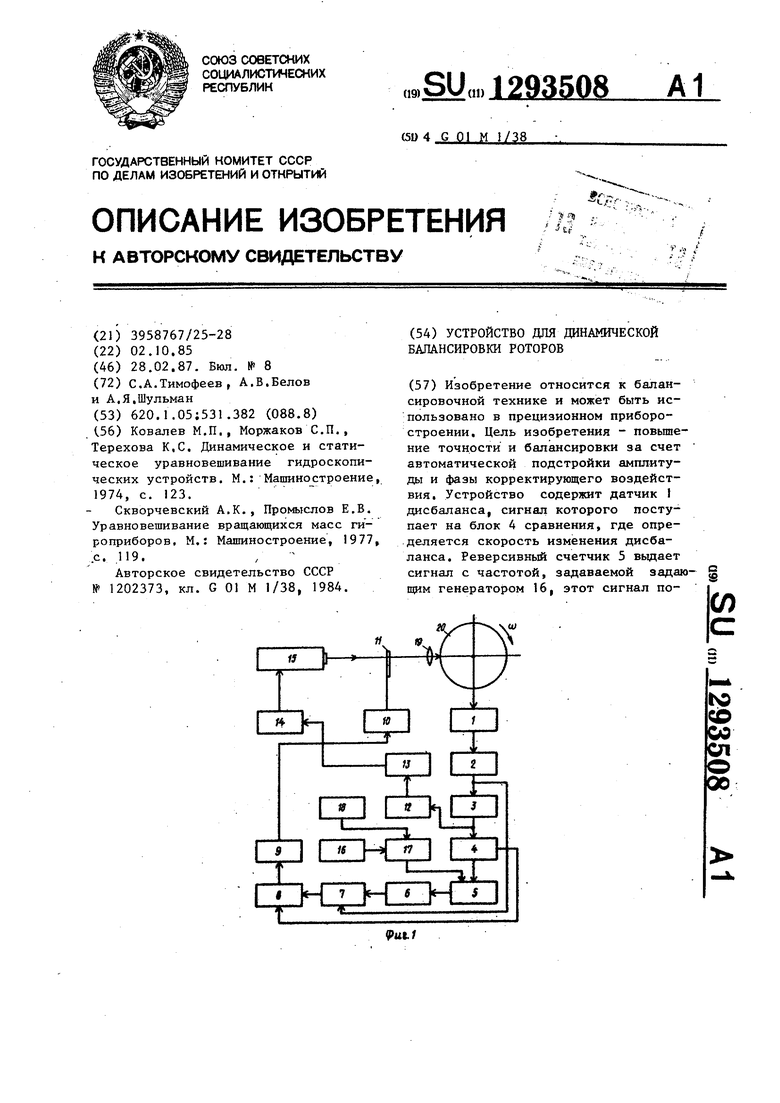
Фиг.З
Редактор Н.Швыдкая
Составитель А.Паникленко Техред М.Ходанич
Заказ 373/42 - Тираж 777Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор М.Пожо
