Изобретение относится к электротехнике и может быть использовано в низкоскоростном электроприводе.
Целью изобретения является ограничение максимальных скоростей исполнительного двигателя.
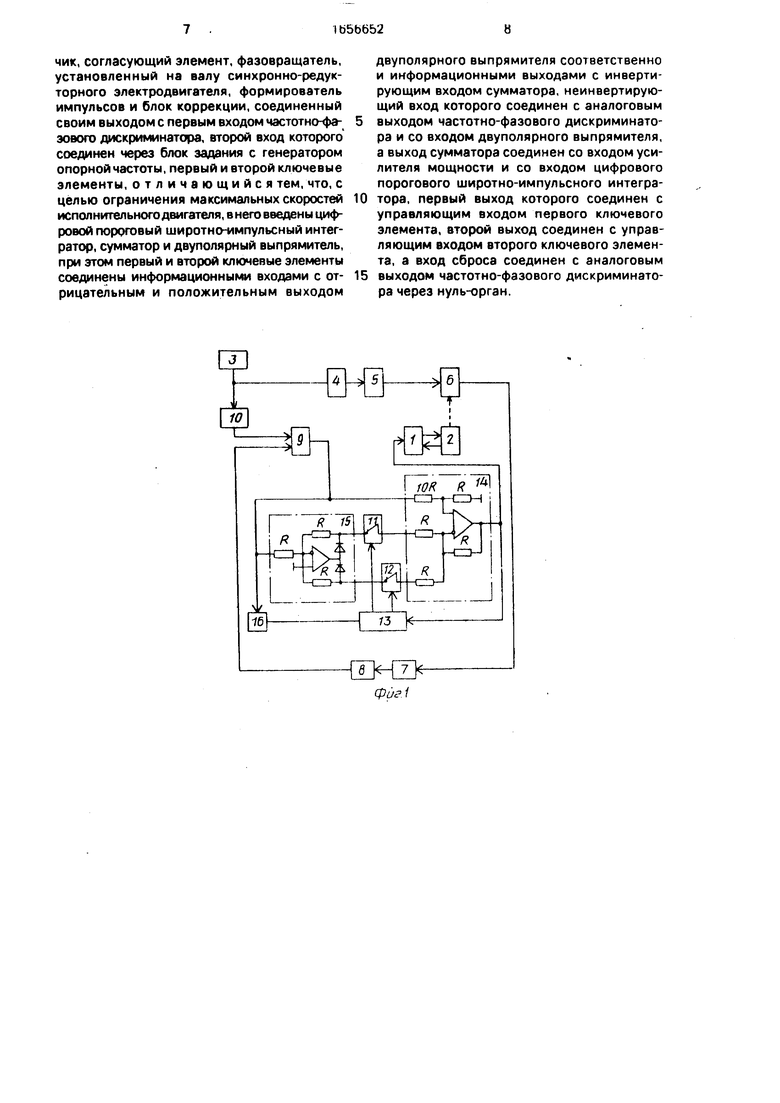
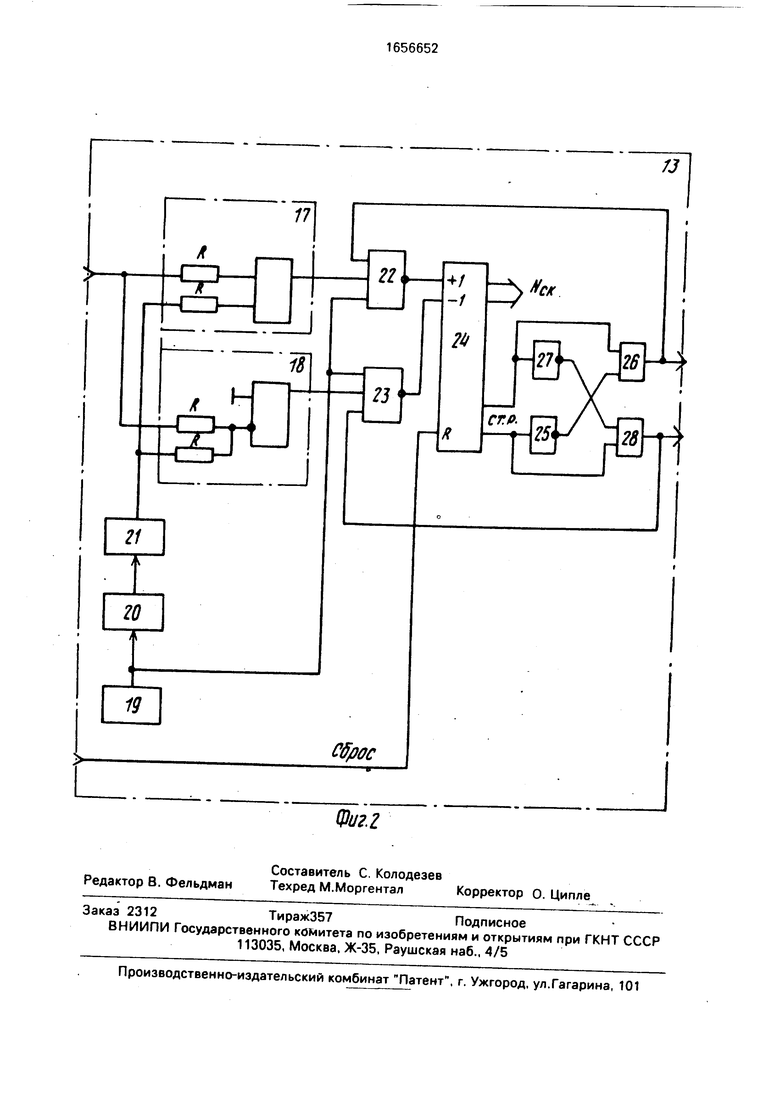
На фиг.1 представлена структурная схема предлагаемого электропривода; на фиг.2 представлена схема цифрового коркового широтно-импульсного интегратора.
Электропривод содержит последовательно соединенные усилитель мощности 1 и синхронно-редукторный электродвигатель 2, последовательно соединенные генератор опорной частоты 3, первый счетчик 4, согласующий элемент 5, фазовращатель 6, установленный на валу электродвигателя 2, формирователь импульсов 7 и блок коррекции 8, соединенный своим выходом со вторым входом частотно-фазового дискриминатора 9, второй вход которого соединен через блок задания 10 с генератором опорной частоты 3, и первый 11 и второй 12 ключевые элементы.
Кроме того, в электропривод дополнительно введены цифровой пороговый ши- ротно-импульсный интегратор 13, сумматор 14 и двупол я рны и выпрямитель 15, при этом первый 11 и второй 12 ключевые элементы подсоединены информационными входами к отрицательному и положительному выходам двуполярного выпрямителя 15 соответственно и информационным выходом к инвертирующим входам сумматора, неинвертирующий вход которого соединен с аналоговым выходом частотно-фазового дискриминатора 9 и со входом двуполярного выпрямителя 15, а выход сумматора 14 соединен с выходом усилителя 1 мощности и со входом цифрового порогового широтно-импульсного интегратора 13, первый выход которого соединен с управляющим входом первого ключевого элемента 11, а выход сброса соединен с аналоговым выходом частотно-фазового дискриминатора 9 через нуль-орган 16.
Цифровой пороговый широтно-импуль- сный интегратор 13 состоит из первого и второго компаратора 17 и 18, последовательно соединенных генератора импульсоё
t
О
ел о о ел
N
с регулируемой частотой 19, второго счетчика 20, цифроаналогового преобразователя 21, подключенного выходом к неинвертирующим входам первого и второго компараторов 17, 18, неинвертирующий вход первого компаратора 17 и второго входа второго компаратора 18 подключены к входу цифрового порогового широтно-импульсного интегра тора 13, а выходы первого и второго компараторов 17 и 18 соединены с первыми входами первого и второго элементов ИЛИ-НЕ 22 и 23 соответственно, второй вход первого и второго элементов ИЛИ-НЕ 22 и 23 соединен с выходом генератора импульсов с регулируемой частотой 19, а их выходы соединены со входамйпрямого и инверсного счета третьего счетчика 24, выход последнего старшего разряда третьего счетчика 24 через второй инвертор 25 и выход предпоследнего разряда третьего счетчика 24 подан на третью схему ИЛИ-НЕ 26, выход которой соединен с третьим входом первого элемента ИЛИ- НЕ 22 и с первым выходом цифрового порогового широтно-импульсного интегратора 13, выход предпоследнего разряда третьего счетчика 24 через первый инвертор 27 и выход последнего (старшего) разряда третьего счетчика 24 поданы на четвертый элемент ИЛИ-НЕ 28, выход которого соединен с третьим входом второго элемента ИЛИ-НЕ 23 и со вторым выходом цифрового порогового широтно-импульсного интегратора 13, вход сброса которого соединен со входом счетчи- кз 24.
Электропривод работает следующим образом.
Частота Моп генератора опорной частоты 3 понижается первым счетчиком 4. Выходной сигнал первого счетчика усиливается и формируется согласующим элементом 5 в гармонический сигнал с частотой (Ов возбуждения фазовращателя 6. При вращении вала синхронно-редукторного двигателя со скоростью на выходе фазовращателя 6 формируется гармонический сигнал суммарной частоты й)в , с учетом знака, который формирователем импульсов 7 преобразуется в импульсный сигнал и через блок коррекции 8 поступает на второй вход частотно-фазового дискриминатора 9. На второй вход частотно-фазового дискриминатора 9 поступает импульсный сигнал частотой (thaa , который формируется в импульсном блоке задания 10.
По принципу действия импульсной фазовой замкнутой системы частота выходного сигнала фазовращателя в установившемся режиме равна частоте задающего воздействия.
йАзад COe ± 0)АВ.
В режиме переустановки частотно-фазовый дискриминатор 9 переходит в режим насыщения. При отсоединенном входе цифрового широтно-импульсного интегратора 13 выходное аналоговое напряжение частотно-фазового дискриминатора 9 выделяется на положительном первом, либо отрицательном втором выходе двуполярного выпрямителя 15 (в зависимости от знака) и через замкнутые ключевые элементы 11 и 12 вновь объединяются на инвертирующих входах сумматора 14. Таким образом выходной сигнал частотно-фазового дискриминатора 9 без искажений с коэффициентом усиления, близким к единице, поступает на вход усилителя мощности 1.
Особенностью синхронно-редукторного двигателя, работающего в режиме частотнотокового управления на малых скоростях, является отсутствие напряжения противо- ЭДС двигателя. При этом входное напряжение усилителя мощности 1 прямо пропорционально напряжению, а также току обмоток управления
синхронно-редукторного электродвигателя и, как следствие моменту исполнительного двигателя
DBX М дв
Известно, что ускорение двигателя при- вода прямо пропорционально его моменту Мд8, но обратно пропорционально суммарному моменту инерции на исполнительной оси Ir,,
35
Р МДП
Јдв-Тследовательно,
UBX Едв SL
При поступлении входного напряжения усилителя мощности 1 на вход цифрового порогового широтно-импульсного интегратора 13 на последнем производится интегрирование этого напряжения с постоянной
воемени
r..,L
т.е. вычисляется скорость двигателя электропривода
дв Ј
По достижении приводом заданной предельной скорости с учетом знака выходное напряжение на первом, либо втором выходе цифрового порогового широтно-импульсного интегратора 13 размыкает первый 11 или второй 12 ключевой элемент и исключает поступление на инвертирующий вход сумматора 14 напряжения той полярности, которая обеспечивала бы разгон двигателя в данном цикле и достижение пороговой скорости о)дв max данной полярности. При
этом прекращается набор скорости и нагрузка продолжает вращение по инерции с той максимальной скоростью, которую развил привод. Для исключения самоторможения нагрузки привода за счет момента трения в опорах вращения, ослабленный примерно на порядок сигнал с выхода частотно-фазового дискриминатора 9 поступает через неинвертирующий вход сумматора 14 на вход усилителя мощности 1.
С целью исключения накопления ошибки интегрирования цифровой широтно-импульс- ный интегратор сбрасывается нуль-органом 16 при установке привода в согласное положение, т. е. когда сигнал рассогласования привода равен нулю.
Цифровой пороговый широтно-им- пульсный интегратор 13 состоит из функциональных узлов, генератора пилы на генераторе импульсов с регулируемой частотой 19, втором счетчике 20 и цифроа- нялоговом преобразователе 21, формирователя сигнала ШИМ на компараторах 17 и 18, преобразователя длительности - число им- пульсов на первом и втором элементах ИЛИ-НЕ 22 и 23, интегрирующий накопительный элемент на третьем счетчике 24 и формирователь сигнала насыщения на первом и втором инверторах 27 и 25 и на треть- ем и четвертом элементах ИЛИ-НЕ 26 и 28 Выходная импульсная последовательность с выхода генератора импульсов с регулируемой частотой 19 обсчитывается вторым счетчиком 20 и цифроаналоговым преобразователем 21, преобразуется в од- нополярное пилообразное напряжение, которое подается на компараторы 17 и 18, где сравнивается с входным сигналом положительной и отрицательной полярности со- ответственно.
Длительность выходного логического сигнала компаратора 17 пропорциональна положительной амплитуде входного сигнала.
Длительность выходного логического сигнала компаратора 18 пропорциональна отрицательной амплитуде входного сигнала. Первый или второй элементы ИЛИ-НЕ 22 и 23 пропускают на прямой или инверс- ный счетный вход третьего счетчика 24 число импульсов импульсного сигнала с выхода генератора импульсов с регулируемой частотой 19, пропорциональное амплитуде входного сигнала с учетом его знака Третий счетчик 24 накапливает (интегрирует) число импульсную последовательность, а его выходной код NCK соответствует текущему значению скорости в данном цикле работы привода,
т.е до очередного сброса по входу R треть- ore счетчика 24.
Если измерение идет преимущественно в прямом счете то старший разряд счетчика 24 имеет низкий уровень, который, будучи проинвертировэн на инверторе 25, в виде высокого уровня поступает на второй выход третьего элемента ИЛИ НЕ 26. Как только третий счетчик 24 достигнет своего предпоследнего разряда и на первом входе третьего элемента ИЛИ-НЕ 26 также появится высокий уровень, то на первом выходе цифрового порогового широтно-импульсно- го интегратора 13 появится низкий уровень сигнала, который введет запрет на прохождение счетных импульсов через первый элемент ИЛИ-НЕ 22 и разомкнет ключ 11.
Если измерение идет преимущественно в обратном счете, то старший разряд третьего счетчика 24 имеет высокий уровень, который поступает на второй вход четвертого элемента ИЛИ- НЕ 28. Как только третий счетчик 24 в инверсном счете достигает такого своего значения, когда предпоследний разряд примет значение низкого уровня и, будучи проинвертирован на инверторе 27 в виде высокого уровня также поступит на первый вход четвертого элемента ИЛИ-НЕ 28, то на втором выходе цифрового порогового широтно-импульсного интегратора 13 появится низкий уровень сигнала, который введет запрет на прохождение счетных импульсов через второй элемент ИЛИ- НЕ 23 и разомкнет ключ 12
При работе привода в режиме слежения, когда скорость двигателя меньше ее максимального (порогового) значения, определенного настройкой блока 13, счетчик реверсивно интегрирует значение фазового рассогласования относительно нулевого значения и на первом и втором выходах цифрового порогового широтно-импульсного интегратора 13 поддерживается высокий уровень.
Регулировка частоты генератора импульсов 19 позволяет в широких пределах изменять частоту счетных импульсов, поступающих на вход третьего счетчика 24, тем самым подстраивая крутизну интегратора в соответствии со значением момента инерции нагрузки для конкретного привода.
Формула изобретения
Электропривод, содержащий последовательно соединенные усилитель мощности и синхронно-редукторный электродвигатель, работающие в режиме частотно-токового управления, последовательно соединенные генератор опорной частоты, первый счетчик, согласующий элемент, фазовращатель, установленный на валу синхронно-редук- торного электродвигателя, формирователь импульсов и блок коррекции, соединенный своим выходом с первым входом частотно-фазового дискриминатора, второй вход которого соединен через блок задания с генератором опорной частоты, первый и второй ключевые элементы, отличающийся тем, что, с целью ограничения максимальных скоростей исполнительного двигателя, в него введены цифровой пороговый широтно-импульсный интегратор, сумматор и двуполярный выпрямитель, при этом первый и второй ключевые элементы соединены информационными входами с отрицательным и положительным выходом
0
5
двуполярного выпрямителя соответственно и информационными выходами с инвертирующим входом сумматора, неинвертирующий вход которого соединен с аналоговым выходом частотно-фазового дискриминатора и со входом двуполярного выпрямителя, а выход сумматора соединен со входом усилителя мощности и со входом цифрового порогового широтно-импульсного интегратора, первый выход которого соединен с управляющим входом первого ключевого элемента, второй выход соединен с управляющим входом второго ключевого элемента, а вход сброса соединен с аналоговым выходом частотно-фазового дискриминатора через нуль-орган.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1987 |
|
SU1453569A1 |
| Способ формирования периодических двуполярных колебаний с заданным фазовым сдвигом и устройство для его реализации | 2016 |
|
RU2625047C1 |
| Задающее устройство для электропривода | 1987 |
|
SU1443109A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПОЛОСЫ ЗАХВАТА СИСТЕМЫ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ С ЗНАКОВЫМ ЛОГИЧЕСКИМ ФАЗОВЫМ ДИСКРИМИНАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2582878C1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2585241C1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Система связи с асинхронной дельта-модуляцией | 1989 |
|
SU1624695A1 |
Изобретение относится к электротехнике и может быть использовано в низкоскоростном электроприводе. Целью изобретения является ограничение максимальных скоро стей исполнительного двигателя Электропривод содержит последовательно соединенные усилитель мощности 1 и синх- ронно-редукторный электродвигатель 2, последовательно соединенные генератор 3 опорной частоты, первый счетчик 4, согласующий элемент 5. В данном электроприводе обеспечивается применение цифрового порогового интегратора 13 высокой точности 0,1 1 % поддержания скорости привода без использования специализированных тахо- метрических устройств с большим коэффициентом усиления 2 ил
т
L-
| Электропривод | 1987 |
|
SU1453569A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задающее устройство для электропривода | 1987 |
|
SU1443109A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
