гулировкн усиления выполнен в виде последовательно соединенных выпря186980
мителя, реверсивного счетчика и цифроаналогового преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1991 |
|
RU2015609C1 |
| Бесконтактная система зажигания для двигателей внутреннего сгорания | 1981 |
|
SU976123A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Устройство для измерения угла наклона | 1981 |
|
SU972212A1 |
| Цифровой фазометр для определения фазы дисбаланса ротора | 1990 |
|
SU1793389A1 |
| Устройство для оценки качества подшипников качения | 1986 |
|
SU1368688A1 |
| Вентильный двигатель | 1983 |
|
SU1081753A1 |
| Преобразователь углового положения вала в код | 1978 |
|
SU781864A1 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
1. УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ, содержащее основание, установленньй на нем радиально-упорный газостатический подшипник, датчик угла поворота, усилитель, показывающий прибор, соединенный с выходом усилителя, и исполнительный механизм, отличающееся тем, что, с целью повьш1ения точности и производительности балансировки, путем автоматизации процесса измерений, оно снабжено детектором нуля углового положения вектора дисбаланса, вход которого соединен с одним из выходов датчика угла поворота, блоком управления, выполненным в виде первой схемы совпадения, первый вход которой соединен с выходом детектора нуля углового положения вектора дисбаланса, первого триггера, выход которого соединен с вторым входом первой схемы совпадения, второго триггера, первый вход которого соединен с выходом первой схемы совпадения, второй, третьей и четвертой схем совпадения, первые входы которых соединены с выходом второго триггера, вторые входы второй и третьей схем совпадения соединены с выходами датчика угла поворота, генератора импульсов, вход которого соединен с вторым входом четвертой схемы совпадения, задатчика угла поворота и компаратора, первый вход которого соединен с выходом задатчика угла поворота, измерителем угла поворота, входы которого соединены с выходами второй и третьей схем совпадения, а выход с вторьш входом компаратора, и блоком регулировки усиления, первьш (Л вход которого соединен с выходом четвертой схемы совпадения, второй с выходом компаратора, а выход - с управляющим входом усилителя, второй вход которого предназначен для соединения с первым источником тока, а исполнительньй механизм выполнен в виде диска из электропроводного материала и двух смещенных по углу отно00 сительно один другого вдоль торцо вой поверхности диска и расположен00 ных напротив нее магнитных индуктоо ров, первый из которых соединен с показьшающим прибором, а второй предназначен для соединения с вторым источником тока. 2.Устройство по П.1, отличающееся тем, что детектор нуля углового положения вектора дисбаланса выполнен в виде последовательно соединенных выпрямителя, порогового элемента и инвертора. 3.Устройство по П.1, отличающееся тем, что блок ре
Изобретение относится к балансировочной технике и может быть использовано при статической балансировке дисковых роторов, в частности шлифовальных кругов.
Целью изобретения является повышение точности и производительности балансировки путем автоматизации процесса измерений.
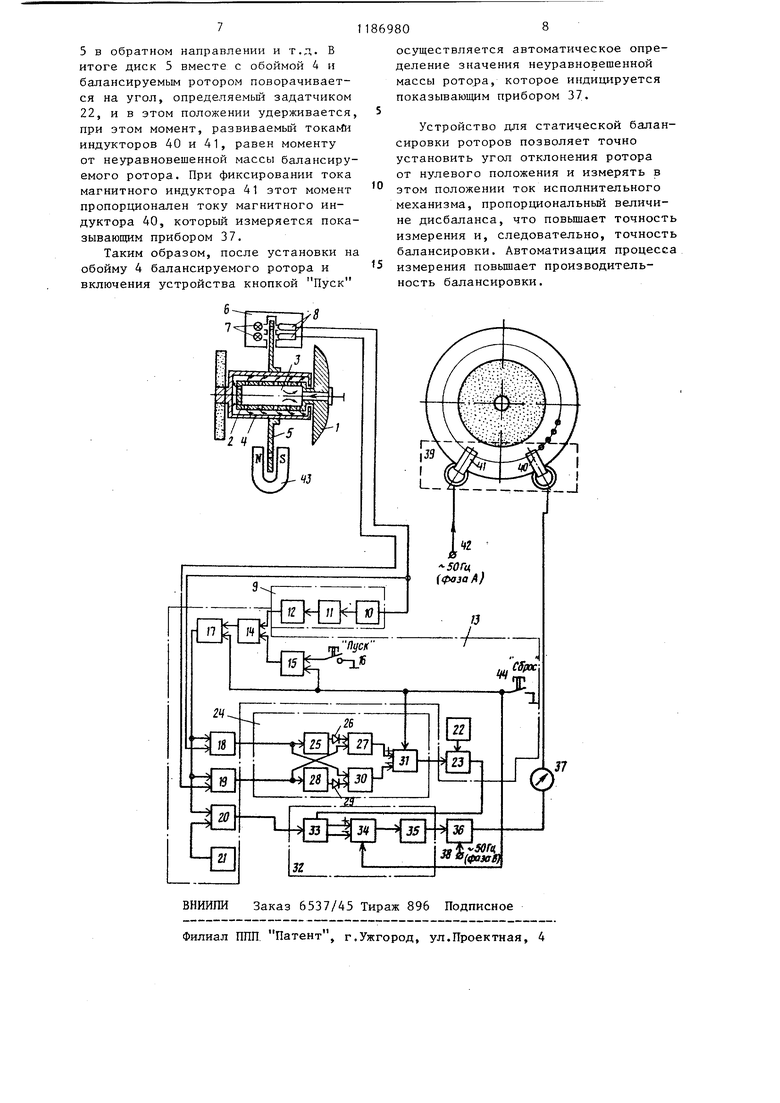
На чертеже изображена схема предлагаемого устройства.
Устройство для статической балансировки роторов содержит основание 1, установленньй на нем радиальноупорньй газостатический подшипник, состоящий из неподвижной цапфы 2 с каналом 3 для подвода сжатого воздуха, подвижной обоймы 4 и жестко закрепленньм диском 5 из электропроводного материала, на периферии которого равномерно расположены, например, 360 отверстий, и измерительньм узел Измерительный узел содержит датчик 6 угла поворота, выполненньй в виде двух фотоизлучателей 7 и двух фотоприемников 8, которые соосны с отверстиями в диске 5, детектор 9 нуля углового положения вектора дисбаланса, вьтолненньй в виде последовательно соединенных выпрямителя 10, порогового элемента 11 и инвертора 12 и соединенньй с одним из выходов датчика 6 угла поворота. Устройство снабжено блоком 13 управления, выполненным в виде первой схемы 14совпадения, первьй вход которой соединен с выходом детектора 9 нуля, первого триггера 15, первьй вход которого соединен с кнопкой 16 Пуск, а выход - с вторым входом первой схемы 14 совпадения, второго триггера 17, первьй вход которого соединен с выходом первой схемы 14 совпадения, второй, третьей и четвертой схем 1820 совпадения, первые входы которых соединены с выходом второго триггера 17, вторые входы второй и третьей
схем 18 и 19 совпадения соединены с фотоприемникамн 8, генератора 21 импульсов, выход которого соединен с вторым входом четвертой схемы 20
совпадения, задатчика 22 угла поворота и комапаратора 23, первый вход которого соединен с выходом задатчика 22 угла поворота, измерителем 24 угла поворота, входы которого соединены с выходами второй и третьей схем 18 и 19 совпадения, выполненнык в виде последовательно соединенных дифференцирующей цепочки 25, вход которой является первым входом измерителя 24 угла поворота, диода 26 и пятой схемы 27 совпадения, последовательно соединенных дифференцирующей цепочки 28, вход которой является вторым входом измерителя 24
угла поворота,диода 29 и шестой схемы 30 совпадения и первого реверсивного счетчика 31, входы которого соединены с выходами пятой 27 и шестой 30 схем совпадения, а выход является
выходом измерителя 24 угла поворота и соединен с вторым входом компаратора 23,и блоком 32 регулировки усиления, первьй вход которого соединен с выходом четвертой схемы 20 совпадения, второй - с выходом компаратора 23, выполненным в виде последовательно соединенных выпрямителя 33, сигнальньй вход которого является первым входом блока 32 регулировки усиления, а управляющий вход соединен с вторым входом второго реверсивного счетчика 34, и цифроаналогового преобразователя 35, выход которого является выходом блока 32 регулировки усиления. Устройство содержит также усилитель 36, управляюпщй вход которого соединен с выходом блока 32 регулировки усиления, показывающий прибор 37, соединенньй с выходом усилителя 36, первьй источник 38, подключенньй к второму входу усилителя 36, исполнигельнын механизм 39, вынолнеиньп в виде диска 5 и двух смещенных по уг относительно один другого вдоль тор цовой поверхности диска и расположе ных напротив нее магнитных индукторов 40 и 41, первый из которых соединен с показывающим прибором 37, второй источник 42 тока, напряжение которого сдвинуто по фазе относител но напряжения первого источника 38, подключенный к второму магнитному индуктору 41, и магнитный успокоитель 43. Блок 13 управления, кроме того, содержит кнопку 44 Сброс, соединенную с вторыми входами перво го и второго триггеров 15 и 17 и установочными входами реверсивных счетчиков 31 и 34. Устройство работает следующим образом. Балансируемый ротор устанавливается на обойму 4 радиально-упорного газостатического подшипника. По каналу 3 неподвижной цапфы 2 подается очищенньм и осушенньй сжатый воздух который создает воздушную подушку между сопрягаемыми цилиндрическими поверхностями неподвижной цапфы 2 и подвижной обоймы 4 газостатического подшипника. С помощью воздушной подушки подвижная обойма 4 вспл вает вместе с бaлaнcиpye tым ротором и приобретает высокую степень подвижности к вращательному движению. При этом момент от неуравновешенной массы балансируемого ротора начинает поворачивать обойму 4 вместе с закрепленным на ней диском 5 в поло жение устойчивого равновесия - неуравновешенной массой вниз. В исход ный момент времени (до начала поворота обоймы 4) триггеры 15 и 17 и реверсивные счетчики 31 и 34 установлены в исходное состояние путем кратковременной подачи на их установочные R-входы нулевого потенциала нажатием кнопки 44 Сброс. При этом нулевое выходное напряжение триггера 15 запирает схему 14 совпадения, а нулевое выходное напряже ние триггера 17 запирает схемы 18-2 совпадения. После установки баланси руемого ротора на обойму 4 нажатием кнопки 16 Пуск опрокидывается триггер 15, при этом появившееся на его выходе напряжение отпирает схем 14 совпадения, которая до этого не могла реагировать на сигналы, посту 804 пающие от детектора 9 нуля углового положения вектора дисбаланса. При вращении обоймы 4 вместе с диском 5 под действием момента от неуравновешенной массы балансируемого ротора отверстия, расположенные по периферии диска 5 периодически открывают путь световым потокам от фотоизлучателей 7 к фотоприемникам 8, и на выходах последних образуются импульсы тока, преобразующиеся выпрямителем 10 в постоянное напряжение, которое, поступая на вход порогового элемента 11, вызывает срабатывание последнего. Выходное напряжение порогового элемента 11, равное значению логической единицы, преобразуется инвертором 12 в напряжение логического нуля, которое является запрещающим для срабатывания схемы 14 совпадения. Под воздействием магнитного успокоителя. 43 колебания обоймы 4 с диском 5 быстро затухают, при этом неуравновешенная масса оказывается в нижнем положении, а занятое вектором дисбаланса угловое положение принимается за нулевое. Так как с прекращением вращения диска 5 фотоприемники 8 перестают вырабатывать импульсы тока, то напряжение на выходе вьшрямителя 10 уменьшается до нуля, что вызывает скачкообразное изменение выходного напряжения инвертора 12 с уровня логического нуля до уровня логической единицы. Поскольку на обоих входах схемы 14 совпадения присутствуют напряжения со значением логической единицы, то схема 14 совпадения срабатывает и возникший перепад ее выходного напряжения переводит триггер 17 в состояние, при котором его выходное напряжение разрешает работу схем 18-20 совпадения. При этом импульсы напряжения, вырабатываемые генератором 21 импульсов, через схему 20 совпадения и вьшрямитель-33 поступают на суммирующий вход реверсивного счетчика 34, вызывая нарастание в нем двоичного числа, которое, поступая на вход цифроаналогового преобразователя 35, преобразуется последним в постоянное напряжение, пропорциональное накапливаемому в счетчике 34 двоичному числу. Это напряжение, поступая на усилитель 36, управляет его коэффициентом усиления таким образом, что выходное напряжение переменного тока усилителя 36 нарастает. Так как усилитель 36 через показывающий прибор 37 нагружен на магнитный индуктор 41, то по мере увеличения двоичного числа в ,реверсивном счетчике 34 в магнитном индукторе 40 нарастает ток, магнитное поле которого наводит в диске 5 вихревые токи. Одновременно в диске 5 наводятся вихревые токи также и магнитньгм полем магнитного индуктора 41, который питается переменным током той же частоты, но сдвинутым по фазе относительно тока магнитного индуктора 40. Магнитные поля наведенных токов, взаимодействуя с магнитными полями индукторов 40 и 41, создают вращающий момент, который заставляет диск 5 и связанную с ним обойму 4 газостатического подшипника поворачиваться. При этом импульсы тока от фотоприемников 8 через открытые схемы 18 и 19 совпадения поступают на входы измерителя 24 угла поворота диска 5,импульсы тока с выхода схемы 18 совпадения поступают на вход дифференцирующей цепочки 25 и на вход схемы 30 совпадения, а импульсы тока с выхода схемы 19 совпадения - на вход дифференцирующей цепочки 28 и на вход схемы 27 совпадения. Так как фотоприемники 8 разнесены между собой в пространстве на величину ,5 2, где Р - расстояние между двумя ближайшими отверстиями, расположенными на периферии диска 5, то фотоприемники засвечиваются фотоизлучателями 7 не одновременно, а с временным сдвигом, равным времени прохождения любым из отверстий периферии диска 5 расстояния, равного 1/2. Соответственно, импульсы тока, формируемые фотоприемниками 8.сдвинуты меж ду собой во времени. Дифференцирующие цепочки 25 и 28 совместно-с диодами 26 и 29 формируют из этих импульсов короткие импульсы положительной полярности, временное положение которых совпадает с фронтами импульсов, поступающих на входы дифференцирующих цепочек 25 и 28. Указанньй сдвиг импульсов, формируемых фотоприемниками 8, приводит к тому, что только на входы одной из схем совпадения (27 или 30) могут поступать импульсы одновременно; на входы другой схемы совпадения импульсы
поступают разнесеннь п-1 во времени. Так, если направление вращения диска 5 таково, что первым от фотопри5 емников В приходит импульс на вход схемы 19 совпадения, то от каждого импульса срабатывает схема 27 совпадения, выход которой связан с суммирующим входом реверсивного счетчика 31. Следовательно, в реверсивном счетчике 31 накапливается двоичное число, соответствующее углу поворота диска 5. При вращении диска 5 в противоположную сторону первым от
фотоприемников 8 приходит импульс на вход схемы 18 совпадения, что приводит к тому, что от каждого импульса срабатывает только схема 30 совпадения, выход которой связан с вычитающим входом реверсивного счетчика 31. В этом случае двоичное число, записанное в реверсивном счетчике 31, уменьшается соответственно изменению угла поворота диска 5 и, следовательно, углу поворота вектора дисбаланса ротора относительно нулевого положения. Код этого числа подается на вход компаратора 23, на другой вход которого подается код
0 с задатчика 22. Как только диск 5 повернется на угол, определяемый задатчиком 22, коды, поступающие на входы компаратора 23, сравниваются и последний вырабатывает сигнал, который, поступая на второй (управляющий) вход выпрямителя 33, вызывает изменение состояния последнего таким образом, что импульсы от генератора 21 через схему 20 совпадения
0 подаются не на cyммиpyющзiй, а на вычитающий вход реверсивного счетчика 34. В результате, если диск 5 продолжает по инерции вращение в первоначальном направлении, записанное
5 в реверсивном счетчике 34 число начинает уменьшаться, уменьшая силу тока в магнитном индукторе 40 и, следовательно, величину вращающего момента. Диск 5 начинает вращаться
0 в обратную сторону. При совпадении кодов, поступающих на входы компара тора 23,последний вырабатывает сигнал, заставляющий выпрямитель 33 направлять импульсы от генератора 21
5 импульсов на суммирующий вход реверсивного счетчика 34, что приводит к увеличению тока в магнитном индукторе 40 и замедлению вращения диска
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ | 0 |
|
SU345393A1 |
| Устройство для балансировки шлифовальных кругов | 1975 |
|
SU609997A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для СТАТИЧЕСКОЙ БАЛАНСИРОВКИ | 0 |
|
SU354308A1 |
