тором, закрепленным на валу первого . электродвигателя, тремя датчиками зон дисбаланса, установленными последовательно, регистрирующими угловое положение сектора и связанными первый с вторым входом первого элемента ЗИ и входом элемента ЗИ-НЕ, второй с вторым входом элемента ЗИ-НЕ, третьим входом первого элемента ЗИ и первым входом второго элемента ЗИ, а третий с третьим входом элемента ЗИ-НЕ и вторым входом второго элемента ЗИ, третий вход которого подключен к выходу первого триггера, вторые входы элемента 4И-НЕ и первого элемента 2И соединены с выходом первого порогового элемента, третий вход элемента 4И-НЕ - с выходом второго порогового элемента, третьим аналоговым ключом, сигнальный вход которого связан с выходом второго усилителя, управляющий вход - с вторым выходом блока временной задержки, а выход -с управляющей обмоткой первого электродвигателя, и четвертьгм аналоговым ключом, сигнальный вход которого связан с выходом третьего усилителя, управляющий вход - с выходом элемента 2ИЛИ и четвертым входом элемента 4И-НЕ, а выход - с управляющей обмоткой второго электродвигателя, вторые входы модуляторов соединены с выходом генератора опорных сигналов,а управляющие входы первого и второго аналоговых ключей соответственно - с выходами третьего и второго триггеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Балансировочное устройство | 1981 |
|
SU991207A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1273758A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1982 |
|
SU1035439A1 |
ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ, содержащее последовательно соединенные датчик дисбаланса и первый усилитель, формирователь, блок угла дисбаланса, выполненный.в виде последовательно соединенных демодулятора, связанного входом с выходом формирователя, второго усилителя и первого порогового элемента, первого электродвигателя, механически связанного с ним первого сельсина и фазовращателя, вход которого соединен с вторым входом демодулятора и выходом первого сельсина, блок величиныдисбаланса, выполненный в виде последовательно соединенных второго демодулятора, сумматора, третьего усилител и второго порогового элемента, второго электродвигателя, механически связанного с ним второго сельсина, подключенного к нему третьего демодулятора, ьгорые входы последнего и второго сел-ьсина подключены к сети промьшшенного тока, вькод - к второму входу сумматора, а выходы второго демодулятора соответственно - к входу формирователя и выходу фазовращателя, и генератор опорных сигналов, выход которого связан с вторьм входом первого сельсина, отличающееся тем, что, с целью повьшения точности балансировки, оно снабжено вторым сумматором, блоком поправки, выполненным из двух одинаковых цепей,каждая из которых вьтолнёна в виде последовательно соединенных выпрямителя, источника постоянного тока, модулятора и аналогового ключа, входы выпрямителей связаны с входом второго сумматора и выходом первого усилителя, а выходы аналоговых ключей - с (Л вторым входом второго сумматора, выход которого подключен к входу формирователя, блоком управления режимом, выполненным в виде последовательно соединенных первого элемента 2И, связанного с ним S-входом первого триггера, первого элемен4 та ЗИ, связанного с ним S-входом вто05 рого триггера и элемента 2Ш1И, послеО довательно соединенных второго элемента ЗИ, второго элемента 2И и свя05 занного с ним S-входом третьего тригto гера, выход которого подключен к второму входу элемента 2ИЛИ, последовательно соединенных элемента 4И-НЕ, третьего элемента 2И и индикатора, элемента ЗИ-НЕ, выход которого связан с вторым входом второго элемента 2И, и блока временной задержки, первый выход которого связан с R-BXOдами триггеров, а второй - с вторым входом третьего элемента 2И и первыми входами элементов 2И и 4И-НЕ, сек
1
Изобретение относится к балансировочной технике и может быть использовано в автоматических балансировочны станках, предназначенных для двухкратной балансировки роторов с огра- ниченной зоной коррекции, например коленчатых валов.
Известно измерительное устройство к балансировочному станку, содержащее последовательно соединенные датчик дисбаланса, избирательный усилитель, выпрямитель, регулируемый источник постоянного тока, модулятор, фильтр нижних частот, сумматор и бло измерения проекций дисбаланса, генератор опорных сигналов и фазовращатель, выход которого связан с вторым входом модулятора, выход усилителя с вtopым входом сумматора, а выходы генератора опорных сигналов соединены с вторьм и третьим входами блока измерений проекций дисбаланса и вхо. дами фазовращателя ij .
Недостаток известного устройства заключается в том, что в случае двухкратной балансировки в одной ограниченной зоне коррекции вводимая в измерительное устройство поправка должна быть неоднозначной, т.е. фаза сигнала поправки должна иметь два значения в зависимости от углового расположения начального дисбаланса.
В противном случае обеспечить двухкратную балансировку в одной и той же ограниченной зоне невозможно. Такие задачи наиболее часто возникают при автоматизации цикла балансировки коленчатых валов с большими начальными дисбалансами, отсутствие решений не позволяет автоматизировать балансировку некоторых типов коленчатых валов.
Наиболее близким по технической сущности к изобретению является измерительное устройство к балансировочному станку, содержащее последовательно соединенные датчик дисбаланса и первый усилитель, формирователь, блок угла дисбаланса, выполненный в виде последовательно соединенных демодулятора, связанного входом с выходом формирователя, второго усилителя и первого порогового элемента, .первого электродвигателя, механически связанного с ним первого сельсина и фазовращателя, вход которого соединен с вторым входом демодулятора и выходом первого сельсина, блок величины дисбаланса, выполненный в виде последовательно соединенных второго демодулятора, сумматора, третьего .усилителя и второго порогового элемента, второго электродвигателя, механически связанного с ним второго
сельсина, подключенного к нему тре, тьего демодулятора, вторые входы последнего и второго сельсина подключен к сети промьшшенного тока, выход к второму входу сумматора, а входы второго демодулятора соответственно к входу формирователя и выходу фазовращателя, и генератор опорных сигналов, выход которого связан с вторы входом первого сельсина, а выход пер вого усилителя - с выходом формирователя 2 .
Однако известное устройство не обеспечивает двухкратной .балансировки роторов с ограниченной зоной коррекции, что при больших начальных дисбалансах ротора приводит к снижению точности балансировки.
Целью изобретения является повышение точности балансировки.
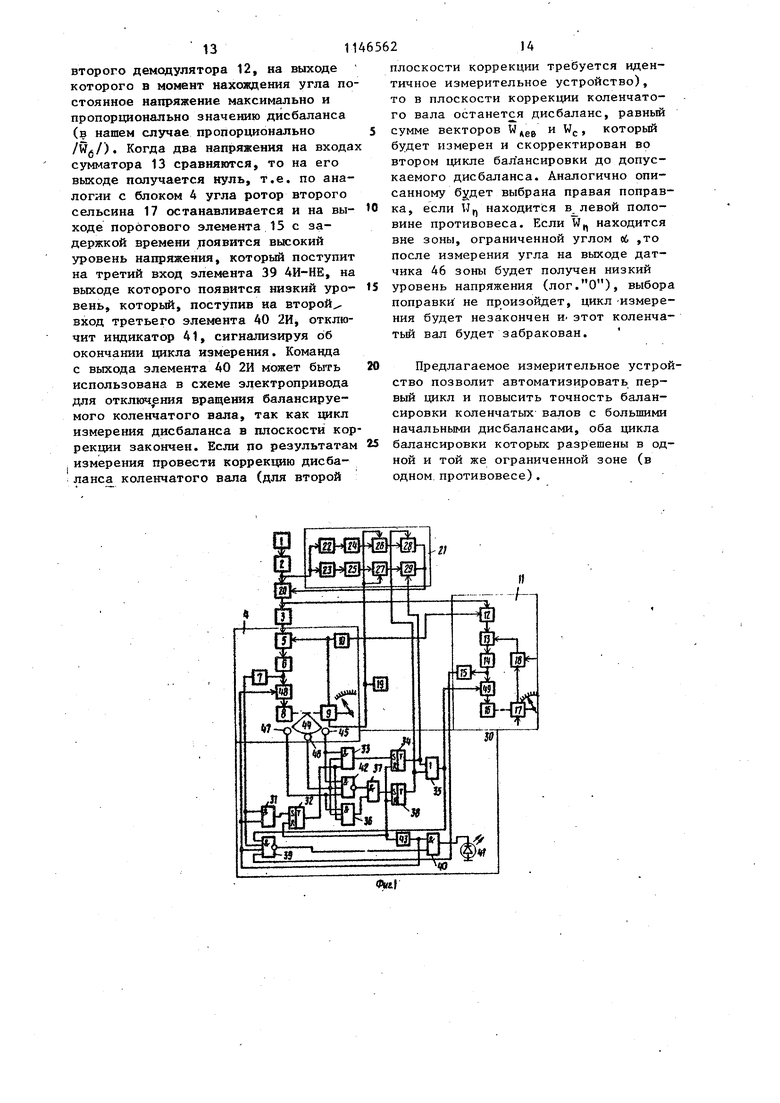
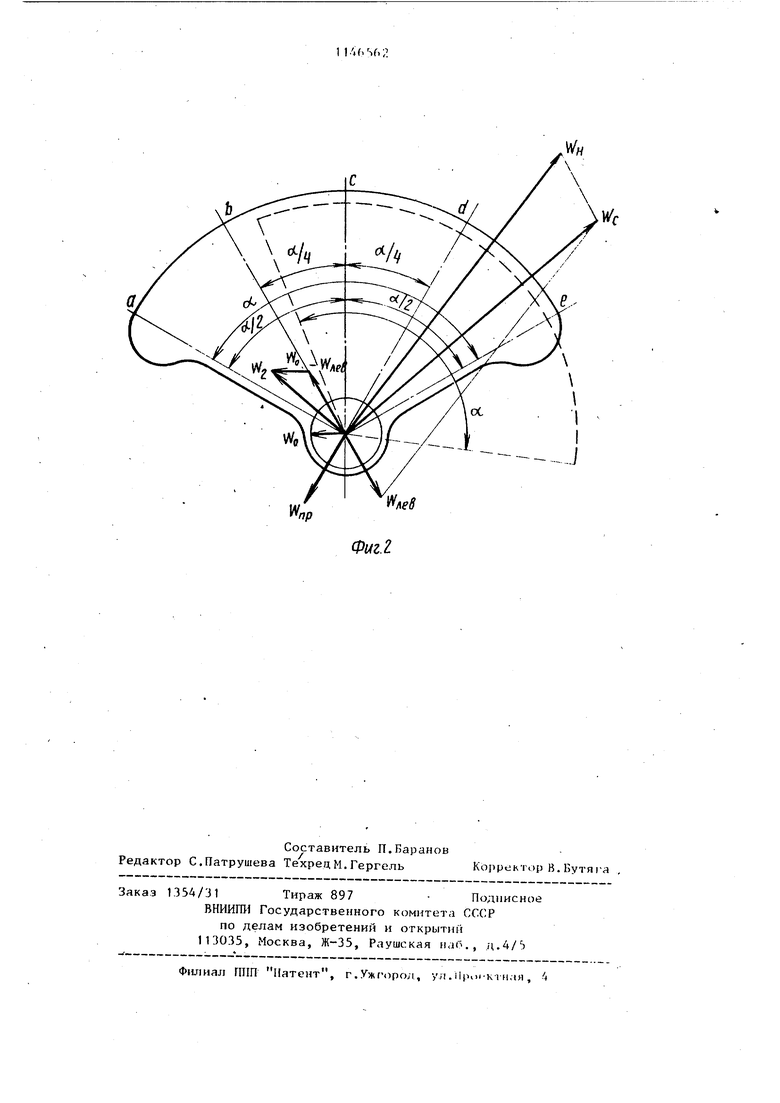
Поставленная цель достигается тем что измерительное устройство к балансировочному станку, содержащее последовательно соединенные датчик.дисбаланса и первый усилитель, формирователь, блок угла дисбаланса, вьтолненный в виде последовательно соединенны демодулятора, связанного входом с выходом формирователя, второго усилителя и первого порогового элемента, первого электродвигателя, механически связанного с ним первого сельсина и фазовращателя, вход которого соединен с вторым входом демодулятора и выходом первого сельсина, блок величины дисбаланса, выполненньп в виде последовательно соединенных второго демодулятора, сумматора, третьего усилителя и второго порогового элемента, второго электродвигателя, механически связанного с ним второго сельсина, подключенного к нему третьего демодулятора, вторые входы последнего и второго сельсина подключены к сети промышленного тока, выход - к второму входу сумматора, а выходы второго демодулятора соответственно - к входу формирователя и выходу фазовращателя, и генератор опорных сигналов, выход которого связан с вторым рходом первого сельсина, снабжено вторым сумматором, блоком поправки, выполненным из двух одинаковых цепей, каждая из которых выполнена в виде последовате.:ьно соединенных выпрямителя, источника постоянного тока, модулятора и аналогового ключа, входы вьшрямителей связаны с входом второго сумматора и вы ходом первого усилителя, а выходы аналоговых ключей- с вторым входом второго сумматора, вьйсод которого подключен к входу формирователя, блоком управления режимом, выполненным в виде последовательно соединенных первого элемента 2И, связанного с ним S-входом первого триггера, первого элемента ЗЙ, связанного с ним S-входом второго триггера и элемента 2ИЛИ последовательно соединенных второго элемента ЗИ, второго элемента 2И и связанного с ним S-входом третьего триггера, выход которого подключен к второму входу элемента 2Ш1И, последовательно соединенных элемента 4 И-НЕ, третьего элемента 2И и индикатора, элемента ЗИ-НЕ, выход которого связан с вторым входом второго элемента 2И, и блока временной задержки, первый выход которого связан с R-входами триггеров,а второй - с вторым входом третьего элемента 2И и первыми входами элементов 2И и 4И-НЕ сектором, закрепленным на валу первого электродвигателя, тремя датчиками зон дисбаланса, установленными последовательно, регистрирующими углевое положение сектора и связанными первьш с вторым входом первого элемента ЗИ и входом элемента ЗИ-НЕ, второй с вторым входом элемента ЗИ-НЕ, третьим входом первого элемента ЗИ и первым входом второго элемента ЗИ, а третий с третьим входом элемента ЗИ-НЕ и вторым входом второго элемента ЗИ, третий, вход которого подключен к выходу rrepBoio триггера, вторые входы элемента 4И-НЕ и первого элемента 2И соединены с выходом первого порогового элемента, третий вход элемента 4И-НЕ - с выходом второго порогового элемента, третьим аналоговым ключом, сигнальньп вход которого связан с выходом второго усилителя, управляющий вход - с вторым выходом блока временной задержки, а выход - с управляющей обмоткой первого электродвигателя, и четвертым аналоговым ключом, сигнальный вход которого связан с выходом третьего усилителя, угтравляющий вход - с выходом элемента 2ИШ1 и четвертым входом элемента 4И-НЕ, а выход - с управляющей обмоткой второго электродвигателя, вторые входы модуляторов соединены с выходом генератора опорных сигналов, а управляющие входы первого и второго аналоговых ключей соответственно - с выходами третьего и второго триггеров. За счет введенных в измерительное устройство элементов изменен по сравнению с известными решениями цикл работы измерительного устройства, в котором сначала производится измерение углового расположения начального дисбаланса, формируется команда на ввод поправки, а затем производится измерение параметров суммарного сигнала. В измерительном устройстве есть два сигнала поправки, отличающихся друг от друга только фазой, при зтом выбор подключаемого сигнала поправки зависит от углового расположения начального дисбаланса. Все это дает возможность автоматизировать цикл балансировки коленчатых валов, коррекция дисбаланса которых разрешена только в одной ограниченной зоне (например, про тивовесе), что повысит точность бала сировки таких коленчатых валов. На фиг.1 изображена функциональна схема измерительного устройства к ба лансировочному станку; на фиг.2 векторная диаграмма распределения дисбалансов коленчатого вала. Измерительное устройство к балансировочному станку содержит последовательно соединенные датчик 1 дисбаланса и первый усилитель 2, формирователь 3, блок 4 угла дисбаланса, выполненный в виде последовательно соединенных демодулятора 5, соединен ного входом с выходом формирователя 3, второго усилителя 6 и первого порогового элемента 7, первого электро .двигателя 8, механически связанного с ним первого сельсина 9 и фазовраща теля 10, выход которого соединен с вторым входом демодулятора 5 и выходом первого сельсина 9, блок 11 величины дисбаланса, выполненный в виде последовательно соединенных второго демодулятора 12, сумматора .13, третьего усилителя 14 и второго пор гового элемента 15, второго электро двигателя 16, механически связанног с ним второго сельсина 17, подключе ного к нему третьего демодулятора 18, вторые входы последнего и второ го сельсина 17 подключены к сети пр мыпшенного тока, выход - к второму входу сумматора 13, а входы второго 11 2 модулятора 12 соответственно - к входу формирователя 3 и выходу фазовращателя 10, и генератор 19 опорных сигналов, выход которого связан с вторым входом первого сельсина 9, второй сумматор 20, блок 21 поправки, вьшолненный из двух одинаковых цепей,каждая из которых вЬтолнена в виде последовательно соединенных выпрямителя 22(23), источника 24 (25) постоянного тока, модулятора 26(27) и аналогового ключа 28(29), выходы выпрямителей 22 и 23 связаны с входом второго сумматора 20 и выходом первого усилителя 2, а выходы аналоговых ключей 28 и 29 - с вторым входом второго Сумматора 20, выход которого подключен к входу формирователя 3, блок 30 управления режимом, выполненный в виде последовательно соединенных первого элемента 31 2И, связанного с ним S-входом первого триггера 32 первого элемента 33 ЗИ, связанного с ним S-входом второго триггера 34 и элемента 35- 2ИЛИ, последовательно соединенных второго элемента 36 ЗИ, второго элемента 37 2И и. связанного с ним S-входом третьего триггера 38, выход которого подключен к второму входу элемента 35 2ИЛИ, последовательно соединенных элементов 39 4И-НЕ, третьего элемента 40 2И и индикатора 41, элемента 42 ЗИ-НЕ, выход которого связан с вторым входом второго элемента 37 2И, и блока 43 временной задержки, выходы которого связаны первый с R-входами триггеров 32, 34 и 38, а второй с вторым входом третьего элемента 40 2И и первыми входами элементов 31 2И и 39 сектор 44, закрепленньй на первого электродвигателя 8 и . . дисбаланса,ус- . тановленные последовательно, регистрирующие угловое положение сектора 44 и связанные первый с вторым входом первого элемента 33.ЗИ и первым входом элемента 42 ЗИ-НЕ второй с вторым входом элемента 42 , ЗИ-НЕ, третьим входом первого элемен 3 ЗИ и первым входом второго элемента 36 ЗИ, а третий с третьим входом элемента 42 и вторым входом второго элемента 36 ЗИ, третий вход которого подключен к выходу пёрвого триггера 32, вторые входы элементов 39 4И-НЕ первого элемента 31 2И соединены с выходом первого порогового элемента, третий вход элемен- та 39 4И-НЕ с выходом второго порог вого элемента 7, третий аналоговый ключ 48, сигнальный вход которого связан с выходом второго усилителя 6, управляющий вход - свторым выхо дом блока 43 временной задержки, а выход с управляющей обмоткой первого электродвигателя 8(условно не показана) и четвертьш аналоговый КЛЮЧ49, сигнальный вход которого связан с выходом третьего усилителя 14, управляющий вход - с выходом элемента 35 2ИЛИ и четвертым входом элемента 39 4И-НЕ, а выход - с управляющей oJбмoткoй второго электродвигателя 16 (не показана), вторые входы модуляторов 26 и 27 соединены с выходом генератора 19 опорных сигналов, а управляющие входы первого и второго аналоговых ключей 28 и 29 соответственно с выходами третьего и второго триггеров 38 и 34. На векторной диаграмме, нанесенной на противовес коленчатого вала. обозначены: W - начальный дисбаланс первого цикла балансировки, W расчетный остаточный дисбаланс первого цикла балансировки, - вектор поправки для левой половины противовеса, Wnp- вектор поправки для г правой половины противовеса, W, суммарный дисбаланс, корректируемый в первом цикле балансировки. Wo на чальный дисбаланс второго цикла балансировки, 06 - угол, ограничивающий 35
зону, в которой на противовесе разрешена коррекция дисбаланса.
Устройство работает следующим образом. Колебания одной из опор балансиро-fO вочного станка под действием дисбаланса коленчатого вала (не показаны) воспринимаются и преобразуются в электрический сигнал датчиком .1 дисбаланса. Сигнал датчика 1, пропорцио-45 нальный дисбалансу, усиливаетс:я первым усилителем 2 и через сумматор 20 поступает на входы формирователя 3 и демодулятора 12 блока 11 величины дисбаланса. Сформированный в импуль- 50 сы прямоугольной формы сигнал с выхода формирователя 3 поступает на вход демодулятора 5 блока 4 угла дисбаланса. Постоянное напряжение вьпсода демодулятора 5 поступает на вход вто- 55 рого усилителя 6 мощности, в состав которого (так же, как и третьего усилителя 14 мощности) входит модулятор.
торого начинает вращаться и приводит во вращение связанный с ним ротор первого сельсина 9. При этом начинает изменяться фаза напряжения статорной который преобразовывает постоянное напряжение выхода демодулятора 5 в переменное частотой 50 .Гц, и усилитель переменного тока (не показаны). Измерение начинается после растормаживания опор балансировочного станка, т.е. после того, как балансируемый коленчатый вал уже приведен во вращение с необходимой для измерения скоростью. Команда на начало измерения приходит на вход элемента 43 временной задержки от электропривода станка в момент растормаживания опор. Этой же командой, поступающей на R-входы триггеров 32, 34 и 38, устанавливаются в О все триггеры RS-типа, и измерительное устройство приводится в исходное состояние. Вьщержка времени элемента 43 временной задержки определяется временем успокоения подвесной системы станка после растормаживания опор и принимается 2-3 с. По истечении этого времени на выходе элемента 43 временной задержки появится высокий уровень напряжения, который поступит на первый вход элемента 31 2И и на второй вход третьего аналогового ключа 48, срабатывает индикатор 41, сигнализирующий о начале цикла измерения, и открывается третий аналоговый ключ 48. Переменное напряжение, полученное на выходе усилителя 6 мощности, через третий аналоговый ключ 48 прикладывается к обмотке электродвигателя 8, ротор кообмотки сельсина 9, роторная обмотка которого питается от генератора 19 опорных сигналов трехфазным напряжением, синхронным с частотой сигнала датчика 1 дисбаланса, так как первый сельсин 9 работает в режиме фазовращателя. Соответственно изменяется фаза напряжения на управляющем входе первого демодулятора 5, рассогласование между фазами сигналов датчика 1 дисбаланса и генератора 19 опорных сигналов изменяется, уменьшается скорость вращения ротора электродвигателя 8. В конечном счете, ротор сельсина 9 останавливается при рассогласовании между фазами входного и упракляющего напряжений первого демодулятора 5, равном 90 и учтенном при настройке станка, и угол дисбаланса 91t4 измеряется. В момент окончания измерения угла дисбаланса выходное напряжение второго усч.пипеля 6, а .чначит и выходное напряженна первого порогового элемента 7, пэдает практически до нуля. В состав пороговых элементов 7 и 15 входят последовательно соединенные выпрямитель, компаратор и элемент временной задержки. Таким образом, по истечении времени задержки, заложенном в первом пороговом элементе 7 и необходимом для полной остановки ротора сельсина 9, после окончания измерения угла па выходе порогового элемента 7 появится высокий уровень напряжения, которьш поступит на первый вход первого элемента 31 2И и на третий вход элемента 39 4И-НЕ. Предположим, что начальный дисбаланс коленчатого Bajta, приведенньй к плоскости коррекции, равен W| и по условиям точности работы механизмов станка и измерительной схемы его невозможно уменьшить за один цикл балансировки более чем в 10-15 раз (как показьгоает опыт, увеличить кратность сниже:-шя дисбаланса на автоматическом балансировочном оборудовании за один цикл балансировки более 15 раз сложно, а значение начального дисбаланса Wj, превышает значение допустимого дисбаланса коленчатого вала в 25 раз) ;Такой начальный дисбаланс может быть снижен до допустимого за два цикла балансировки, но при вьшолнении первого цикла балансировки следует обес печить условие нахождения остаточного дисбаланса первого цикла (это будет начальньй дисбаланс второго цик- о сто ла) в зоне противовеса коленчатого вала так как оба цикла балансировки ра13решены только в одном противовесе коленчатого вала. Угол оС ограничивает зону, в которой разрешена коррекция 45 дисбаланса. Условно разделяем противовес коленчатого вала на две равные зоны, ограниченные углом об/2. Если начальный дисбаланс будет находиться в одной из зон (в нашем случае в пра-50 вой половине противовеса), то остаточный дисбаланс первого цикла балансировки должен находиться в другой зоне для того, чтобы при коррекции дисбаланса (например, сверлением 55 отверстий в противовесе) корректирующие дисбаланс отверстия не совпали, что приведет не только к поломке редующе с ц ла етс ра поп где 2 жзпцего инструмента, но и к браку балансируемого коленчатого вала. В связи с тем, что в противовесе имеются две зоны коррекции (одна для первого цикла балансировки, а другая - для второго) и эти зоны могут меняться местами в зависимости от углового расположения начального дисбаланса, то в обоих случаях измерительное устройство станка, выполняющего первый цикл балансировки, должно обеспечить нахождение остаточного дисбаланса первого цикла в свободной зоне (в нашем случае в левой половине противовеса), т.е. фаза поправки (под поправкой понимается электрический сигнал, вырабатываемый измерительным устройством, зависимый от значения дисбаланса и с постоянной фазой) вноСИМОЙ в измеряемый дисбаланс, должна также изменяться в зависимости от углового расположения начального дисбаланса. Для выполнения этого условия блок 21 поправки выполнен в ввде двух электрических цепей, каждая из которых вырабатывает сигнал поправки для одной из зон (половины) противовеса коленчатого вала. Сигнал с выхода первого усилителя 2 поступает на вход выпрямителя 22(23), выходное напряжение которого пропорционально значению начального дисбаланса. Соединенньй последовательно с вьшрямителем 22(23) источник 24(25) постоянного тока учитывает в остаточном дисбалансе погрешности, не связанные с дисбалансом коленчатого вала. Суммарное постоянное напряжение выхода выпрямителя 22(23) и источника 24(25) поянного тока прикладывается к вхомодулятора 26(27), фаза управляго напряжения которого совпадает ентром зоны коррекции второго цик(направжение ob(od) и настраивая с помощью элементов модулято26(27). Сигнал, вырабатываемый блоком 21 равки, описывается выражением -й- « W - выходной сигнал блока 21 поправки J Wf - измеряемый дисбаланс тах максимальньй дисбаланс, которьй можно скорректиро-; вать при черновом цикле балансировки , sin «672 где w - угол зоны, в которой проводится коррекция дисбаланса при черновом цикле балан сировки, i - расчетный коэффициент сниженин дисбаланса за один цикл (черновой) балансировки;i - погрешность измерения дисбаланса (принимается около 3%) . Первое слагаемое (по приведенной формуле) сигнала поправки Кйучиты-вает погрешности чернового цикла балансировки, не связанные с дисбалансом, и регулируется изменением выходного напряжения источника 24(25) постоянного тока в процессе наладки. Второе слагаемое сигнала поправки .1 Д V ,, „ (т - --)K.W учитывает погрешнос Wmox ти чернового цикла, зависимые от дисбаланса, и регулируется коэффициентом передачи выпрямителя 22(23) Вектор сигнала поправки при измерении вычитается из вектора сигнала, эквивалентного измеряемому дисбалансу. Каждый из двух сигналов, вырабатываемых блоком 21 поправки, описывается одним и тем же математическим вь1ражением и отличается друг от друга только фазой сигнала. Таким образом, в блоке 21 поправки одновременно вырабатываются два сигнала поправ ки, отличанщихся друг от друга только фазой сигнала. Какой из этих сигналов поступит на второй вход второго сумматора 20 зависит от угла начального дисбаланса, зона которого оп1 еделяется в процессе измерения. Сектор 44 жестко связан с ротором первого сельсина 9 и поворачивается вместе с ним в процессе измерения угла. Угол сектора 44 равен углу об , т.е. сектор 44 имитирует зону противовеса, в которой разрешена коррекция дисбаланса. В процессе измерения угла сектор 44 ориентируется таким образом, что вектор дисбаланса проходит через центр сектора (фиг.2) шунктирными линиями показано положение сектора 44 при измерении дисбаланса W). Если при настройке станка установить на противовес в точку С контрольный груз, то края зоны сектора 44 совпадут с прямыми Оа и Ое. Расположение датчиков 45-47 зон дисбаланса в этом случае будет соответствовать точкам 01, с и е .В качестве датчиков 45-47 зон дисбаланса могут быть применены бесконтактные конечные выключатели. Сектор 44 выполняется в этом случае металлическим и при расположении сектора 44 напротив датчиков 45-47 зон дисбаланса на их выходах получим высокий уровень напряжения. Итак, блоком 4 угла измерено угловое расположение дисбаланса W|, . Сектор 44 расположится напротив датчиков 46 и 47 зон дисбаланса и высокий уровень напряжения появится на двух входах элементов 36 ЗИ и 42 ЗИ-НЕ. Так как в момент окончания измерения угла на выходе первого элемента 31 2И появится высокий уровень, первый триггер 32 установится в единичное положение, на выходе второго элемента 36 ЗИ появится высокий уровень, установится в единичное состояние третий триггер 38, откроется аналоговьм ключ 28 и на второй вход второго сумматора 20 поступит сигнал . На выходе второго сумматора 20 появится сигнал, пропорциональньй W,, первый электродвигатель 8, а с ним и сельсин 9 начнут вращаться и остановятся в положении, соответствующем угловому расположению W. Одновременно начнется измерение блоком 11 величины дисбаланса W при срабатывании третьего триггера 38 на выходе элемента 35 2ИЛИ появится высокий уровень, откроется чствертьй аналоговый ключ 49. Второй электродвигатель 16 и связанный с ним второй сельсин 17 начнут вращаться .. При этом изменяется фаза управляющего напряжения третьего демодулятора 18, так как ротор сельсина 1 7 запитан трехфазным напряжением частотой 50 Гц, а сам сельсин 17работает в режиме фазовращателя. На второй вход третьего демодулятора 18приходит сформированное в импульсы прямоугольной формы (формирователь прямоугольных импульсов входут а состав демодулятора 18 и на схеме не выделен отдельным элементом). На выходе третьего демодулятора 18 получается постоянное напряжение с линейной зависимостью от угла поворота отора второго сельсина 17, которое подается на второй вход сумматора 13 с полярностью, обратной полярности выхода второго демодулятора 12. Фаза напряения статорной обмотки сельсина 9 поворачивается на 90 фазовращателем 10 и поступает на управляющий вход
второго демодулятора 12, на выходе которого в момент нахождения угла постоянное напряжение максимально и пропорционально значению дисбаланса (в нашем случае пропорционально /W(5/)« Когда два напряжения на входа сумматора 13 сравняются, то на его выходе получается нуль, т.е. по аналогии с блоком 4 угла ротор второго сельсина 17 останавливается и на выходе порогового элемента 15 с задержкой времени доявится высокий уровень напряжения, который поступит на третий вход элемента 39 4И-НЕ, на выходе которого появится низкий уровень, который, поступив на второй вход третьего элемента 40 2И, отключит индикатор 41, сигнализируя об окончании цикла измерения. Команда с выхода элемента 40 2И может быть использована в схеме электропривода для отключ ения вращения балансируемого коленчатого вала, так как цикл измерения дисбаланса в плоскости коррекции закончен. Если по результатам измерения провести коррекцию дисбаланса коленчатого вала (для второй
плоскости коррекции требуется идентичное измерительное устройство), то в плоскости коррекции коленчатого вала останется дисбаланс, равный сумме векторов и W, который будет измерен и скорректирован во втором цикле балансировки до допускаемого дисбаланса. Аналогично описанному выбрана правая поправка, если и находится волевой половине противовеса. Если W находится вне зоны, ограниченной углом с6 ,то после измерения угла на выходе датчика 46 зоны будет получен низкий уровень напряжения (лог.О), выбора поправки не произойдет, цикл -измерения будет незакончен и- зтот коленчатый вал будет забракован.
Предлагаемое измерительное устройство позволит автоматизировать первый цикл и повысить точность балансировки коленчатых валов с большими начальными дисбалансами, оба цикла балансировки которых разрешены в одной и той же ограниченной зоне (в одном, противовесе).
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1978 |
|
SU746227A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU911187A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
