(54) ГИДРАВЛИЧЕСКИЙ ПРИВОД РАБОЧЕГО ОБОРУДОВАНИЯ ОДНОКОВШОВОГО ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ЭКСКАВАТОРА | 2020 |
|
RU2735771C1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Гидропривод одноковшовного экскаватора | 1974 |
|
SU541946A1 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 1968 |
|
SU231395A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Гидравлический привод экскаватора | 1979 |
|
SU839562A1 |
| Гидропривод одноковшового экскаватора | 1986 |
|
SU1308722A1 |
| Рабочее оборудование одноковшового экскаватора | 1973 |
|
SU548690A1 |
| Рабочее оборудование обратной механической лопаты | 1989 |
|
SU1701833A1 |
Изобретение относится к строительному и дорожному машиностроению, а именно к гидравлическому приводу рабочего оборудоваиия одноковшового экскаватора. Известен гидравлический привод одноковшового экскаватора, у которого напорные линии силовых цилиндров ковша или рукоятки соединены посредством дополнительных устройств с напорной линией силового цилиндра перемещения стрелы. При чрезмерном возрастании давления в напорной магистрали рабочего цилиндра расход насоса переключается в поддерживающую (подъемную) полость цилиндра стрелы, поднимая ее и уменьшая тем самым толщину стружки и нагрузку на рабочее оборудова,ние (I. Однако перегрузка элементов указанного привода происходит не только от чрезмерного давления, создаваемого насосом в напорных магистралях (активное давление), но и от реактивного давлеиия в запертых магистралях. Например, при разработке грунта поворотом ковша в запертых полостях гидроцилиндра рукояти возникают очень большие реактивные давлеиия, которые могут привести к перегрузке элементов конструкции и привода рабочего оборудования. Наиболее близким техническим решением к изобретению является привод рабочего оборудования одноковшового экскаватора, обеспечиваюший подъем стрелы и выглубление ковша при чрезмерном активном давлении в напорной магистрали гидроцилиидра ковша, включающий гидроцилиндры ковша, рукояти и стрелы, напорные и сливные, магистрали и управляемые клапаны {2. . Недостаток данного привода заключается в том, что подъемная полость гидроцилиидра стрелы соединена только с напорной магистралью цилиндра ковша, а возрастание давлеиия в напорной магистрали цилиидра рукояти не ограничено, причем основным сигналом для выглубления ковша является чрезмерное активное давление в напорной магистрали, хотя перегрузка элементов привода и конструкции рабочего оборудования возможна и от чрезмерных реактивных давлений (усилий). Последнее обстоятельство особенно важно в случае, если шток запертого гидроцилиндра рукояти находится в одном из крайних положений и
реакгнвное чрезмерное усилие на (птоке |идроцнлинлра не может быть ограничено посредством ограничения реактивного давления ь гидросисигеме. При этом возможна перегрузка элементов конструкции рабочего оборудования, что, в конечном счете, ведет к снижению надежности элементов привода и рабоче1о оборудования и ухудшению технико-экономических ноказателей машины в целом. Увеличение интенсивности нагружения ведет к снижению надежности и долговечности конструктивных элементов экскаватора.
Цель изобретения - повышение надежности и долговечности экскаватора, увеличение его производительности за счет автоматического выглубления ковша для ограничения нагрузок на рабочее оборудование и гидравлический привод.
Указанная цель лаостигается тем, что гидравлический привод снабжен установленным на стреле и кинематически связанным .посредством кривошина с. гидроцилиндром рукоятки дополнительным гидроцилиндром с напорной магистралью, сообщенной через управляемые клапаны с поршневой полостью гидроцилиндра стрелы, штоковая полость которого через управляемые клапаны соединена со сливом.
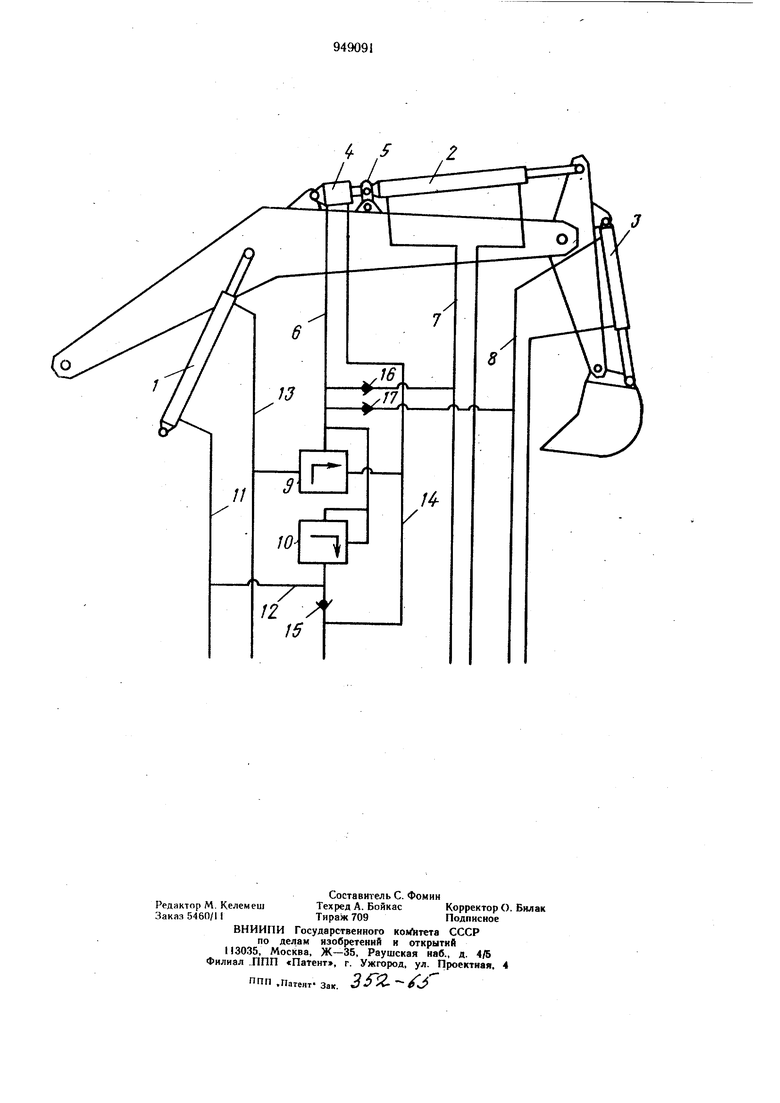
На чертеже изображена принципиальная гидравлическая схема экскаватора.
Схема включает гидроцилиндры 1, 2 и 3. Для подъема стрелы, поворота рукояти и. KOBHia дополнительный гидроцилиндр.4 кинематически связан кривошипом 5 с гидроцилиндром 2 рукояти. Напорные магистрали 6, 7 и 8 выведены на управляемые клапаны 9 и 10. Подъемная полость гидроцилиндра 1 подъема стрелы соединена магистралью II и
12с клапаном 10, а другая рабочая полость этого же цилиндра соединена магистралью
13с клапаном 9, линия 14 отвода которого выведена на слив. Обратный клапан 15 служит для подпитки гидроцилиндра 1 из линии слива 14, а обратные клапаны 16 и 17 отсекают магистраль 6 от магистралей 7 я 8, в случае если давление в последних меньnje.
Диаметр поршня дополнительного гидроцилиндра 4 несколько больше диаметра поршня гидроцилиндра 2 рукояти. Соответственно определяется усилие на штоках ЭТИХ: гидроцилиндров. Поэтому при подач.е давления в напорные faгиcтpaли б и 7 шток гидроцилиндра 4 выдвигается, поворачивая кривошип 5 по часовой стрелке. Шток гидроцилиндра 4 как правило, находится п выдвинутом положении. Давление настройки клапана 9 несколько меньше давления настройки клапана 10, что обеспечивает ГКрежаюшее срабатывание клапана 9.
.Гидравлический привод работает следующим образом.
После того как ковш подведен к забою, оператор включает напорную магистраль 7
или 8, разработка грунта производится при работе соответственно гидроцилиндра рукояти или ковша, либо при совместной работе этих гидроцилиндров.
Если копание грунта осуш.ествляется поворотным отнс)сительно неподвижной рукояти движением ковша, то в рабочих полостях гидроцилиндра 3 ковша насосом создается активное давление, а в запертых гидроцилиндрах рукояти и стрелы развиваются реак
тивные давления. Наибольшая величина активного давления зависит от характеристики насоса и настройки предохранительного клапана, а наибольшая величина реактивного давления зависит от настройки клапанов 9 и 10.
В зависимости от направления и величины силы копания на штоке гидроцилиндра i стрелы возникает сжимаюн1ая или растягивающая реактивная нагрузка, а в рабочих полостях этого же гидроцилиндра развивается соответствующее реактивное давление. В случае действия растя 1вающего усилия магистраль 13 является напорной, и если активное или реактивное давление в магистралях 6, 7 и 8 превышает давление Настройки клапана 9, жидкость из ма1истра-.
ли 13 направляется на слив через линию 14. Шток гидроцилиндра I выдвигается, поднимая стрелу и выглубляя ковш. Подпитка магистрали 11 осуществляется через линию 12 и обратный клапан 15.
При отжимающей нагрузке на njTOKe гидроцилиндра i магистраль И является напорной и срабатывание клапана 9 не приводит к перемещению штока. Дальнейшее увеличение нагрузки в гидроцилиндрах 2, 3 и 4 (соответственно давления в магистралях 7,
8 и 6) приводит к срабатыванию клапана 10, жидкость из магистралей 6, 7 и 8 поступает через магистрали 12 и 11 в подъемную полость гидроцилиндра 1, где давление обыч но значительно меньше. Из противоположной, полости жидкость вытесняется через
магистраль 13 и клапан 9 в линию слива 14. Подъем стрелы и выглубление ковпш происходит до тех пор, пока не снизится давление в магистралях 6, 7 и 8.
Диаметр поршня дополнительного гидроц 1линдра 4 несколько больше диаметра поршня гидроцилиндра 2 рукояти. Соответственно и усилие на штоке дополнительного гидроцилиндра 4 больше усилия на што ке гидроцилиндра 2 рукояти. Поэтому при подаче давления в напорную магистраль 7 или 8 (копание при помощи гидроцилиндра рукояти или ковша) жидкость, проходя через обратный клапан 16 или 17 и магистраль 6, поступает в поршневую полость дополнительного гидроцилиндра 4 и перемещает шток с кривошипом 5 в крайнее правое (по чертежу) положение. Из другой- полости гидроцилиндра 4 жидкость вытесняется в линию 14 слива. Крайнее правое положение
штока цилиндра 4 является нормальным при работе,экскаватора.
Давление жидкости в магистрали 6 не превышает давление в магистрали 7, поэтому автоматическое выглубление ковша может быть только из-за чрезмерного возрастания давления в магистралях 7 или 8. Однако при копании с помощью гидроцилиндра 3 ковша и кр;айием выдвинутом положении рукояти на токе гидроцилиндра 2 рукояги, который предельно втянут, может возникнуть опасно большое усилие, В этом случае кривошип 5 со штоком гидроцилиндра 4 смещается влево, В магистрали 6 создается высокое давление жидкости, достаточное для срабатывания клапана 9 или 10. Дальнейшее действие привода аналогично описанному выше.
Если давление настройки клапанов 9 и 10 назначить несколько ниже давления настройки предохранительного клапана, ограничивающего реактивное давление, но выше давления настройки предохранительного клапана насоса, то предлагаемый привод обеспечит автоматическое ограничение нагрузок на рабочее оборудование экскаватора, что важно при использовании сменных рабочах органов или сменных элементов оборудования. Например, для увеличения глубины копания используют рукояти с увеличенной длиной. При этом значительно увеличивается реактивное усилие на щтоке гидроцилиндра- рукояти, возможна перегрузка элементов привода и металлоконструк-.
ции, снижается их надежность и долговечность.
Использование предлагаемого гидропривода позволяет автоматически выглублять ковш при его стопорении, уменьшить нагрузки на элементы привода и металлоконструкцию рабочего оборудования, что повышает их надежность и долговечность.Формула изобретения
Гидравлический привод рабочего обйрудования одноковшового экскаватора, включающий гидроцилиндры ковша, рукояти и стрелы, управляемые клапаны и гидромагистрали, отличающийся тем, что, с целью повышения надежности и долговечности экскаватора, он снабжен установленным на стреле и кинематически связанным посредством кривошипа с гидроцилиндром рукояти дополнительным гидроцилиндром с напорной магистралью, сообщенной через управляемые клапаны с поршневой полостью гидроцилиндра стрелы, щтоковая полость которого через управляемые клапаны соединена со сливом.
Источники информации, принятые во внимание при экспертизе
№ 244223, кл. Е 02 F 9/22, 1969 (прототип) 4 /
