Изобретение относится к измерительной технике и может быть исполь- зопано для измерения профиля и шероховатости поверхности, а также для определения толщины тонких пленок.
Цель изобретения - повышение точности измерений за счет исключения погрешностей, связанных с переходными процессами при автоподстройке и флуктуациями разности хода плеч ин- терферометра,
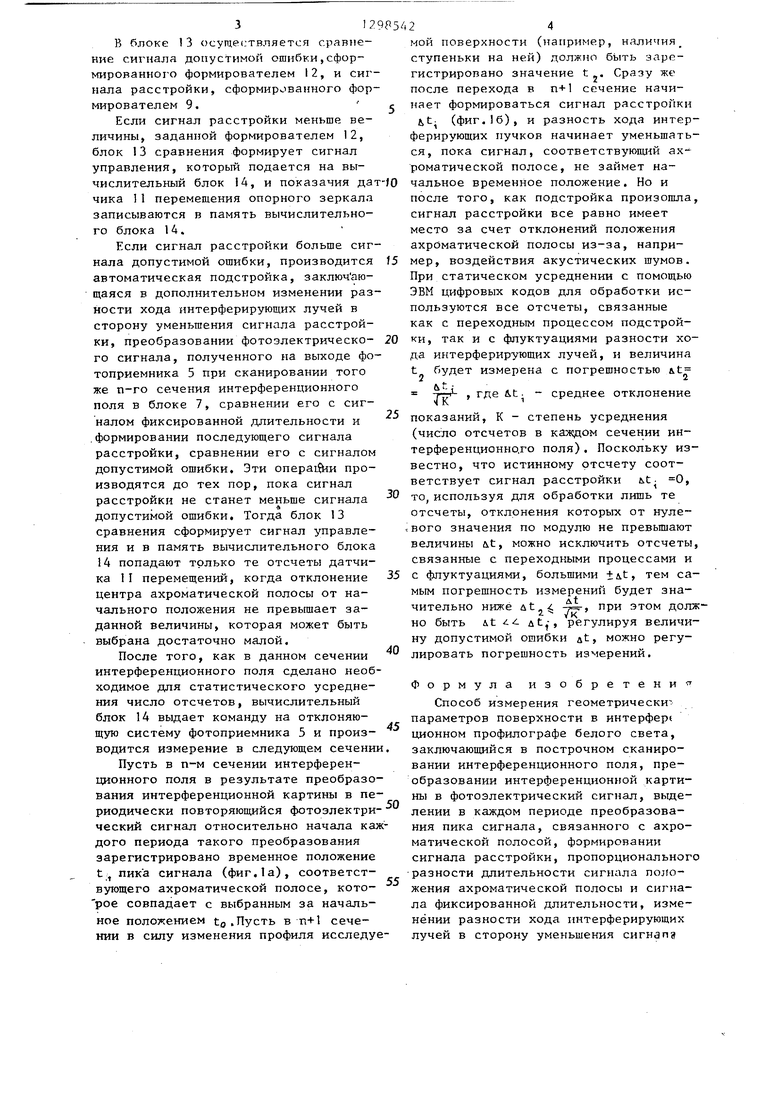
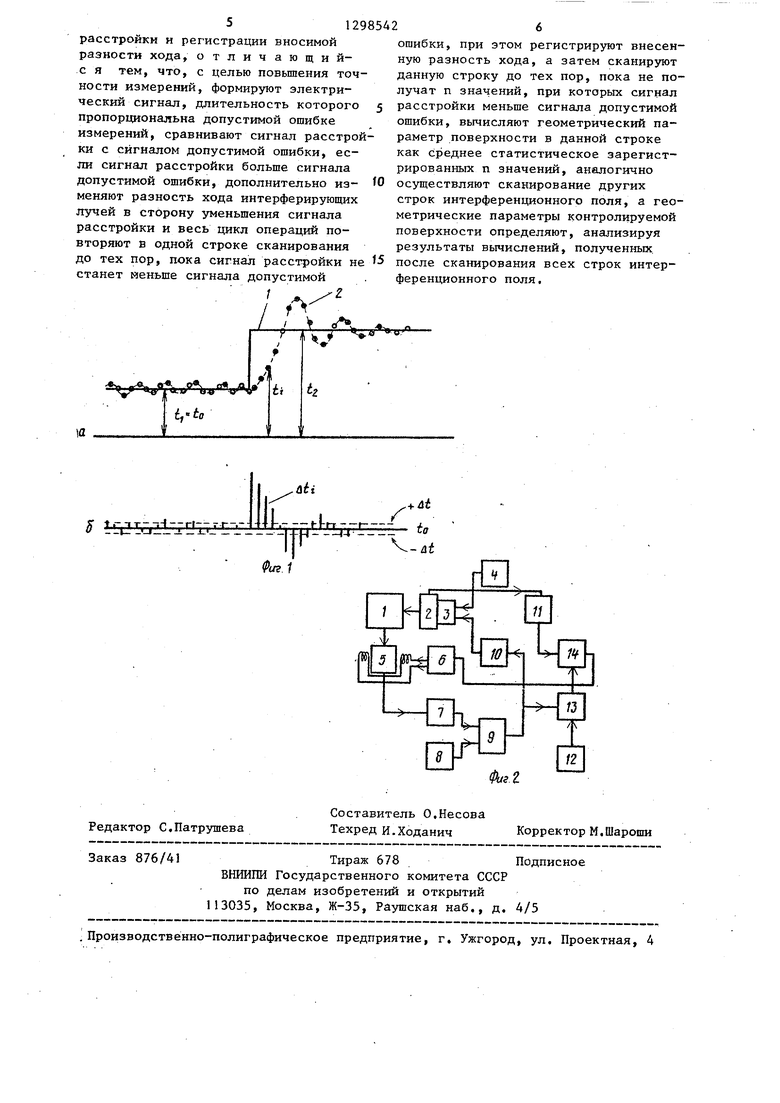
На фиг.1 приведены диаграммы напряжения на выходе датчика перемещения опорного зеркала (а) и сигналов расстройки (б); на фиГ.2 - блок-схем устройства, реализующего способ.
Спосбб реализован устройством, которое содержит интерферометр 1 белого света, опорное зеркало 2 интерферометра 1, модулятор 3, закрепленный на зеркале 2, генератор 4 модулирующего напряжения, диссекторный фотоприемник 5, генератор 6 отклоняющего напряже- ния, блок 7 измерения положения ахроматической полосы, формирователь 8 сигнала фиксированной длительности, формирователь 9 сигнала расстройки, генератор 10 компенсирующего напряжения, датчик 11 перемещения опорного зеркала, формирователь 12 сигнала допустимой ошибки, блок 13 сравнения, вычислительный блок 14. Интерферометр 1 оптически связан с диссекторным фо- топриемником 5, отклоняющая система которого связана с входом генератора 6 отклоняющего напряжения, а выход - с блоком 7 измерения положения ахроматической полосы, выход которого подключен к первому входу формирователя 9 сигнала расстройки, к второму входу KOTOpog O подключен формирователь 8 сигнала фиксированной длительности. Выход формирователя 9 сигнала расстроки связан с входом блока 13 сравнения и с входом генератора IО компенсирующего напряжения, выход которого связан с модулятором 3, к которому подключен также генератор 4 модулирующего напряжения. Вход датчика 11 пе ремещения опорного зеркала связан с опорным зеркалом 2, а его выход - с первым входом вычислительного блока 4, к второму входу которого подклю
чей блок 13 сравнения, а выход вычис лительного блока 14 связан с генератором 6 отклоняющего напряжения. Формирователь 12 сигнала допустимой
5
0
5
20
30
с . й40
50
55
ошибки подключен к второму входу блока 13 сравнения.
Способ и работа устройства осуществляются следуюпшм образом.
Генератор 4 модулирующего напряжения приводит в периодическое движение модулятор 3, на котором закреплено опорное зеркало 2 интерферометра 1. Диссекторный фотоприемник 5 осуществляет построчное сканирование полученного интерференционного поля интерферометра 1 в каждом периоде модуляции. На выходе диссекторного фотоприемника 5 возникает фотоэлектрический сигнал, полученный в резуль- ,тате преобразования интерференционной картины в п-м сечении интерференционного поля. Блок 7 измерения положения ахроматической полосы выделяет пик поступившего на вход сигнала,связанного с ахроматической полосой и формирует сигнал, пропорциональный временному положению центра ахроматической полосы относительно начала развертки. Формирователь 8 формирует сигнал, длительность которого не изменяется. Сигналы с выходов блока 7 и формирователя 8 поступают на вход формирсувателя 9 сигнала расстройки, который формирует импульс, пропорциональный разности длительностей входных сигналов, т.е. пропорциональный смещению пика сигнала, полученного на выходе фотоприемника. 5, отно-- сительно положения, выбранного при помощи сигнала фиксированной длительности за начальное. За начальное положение центра ахроматической полосы, относительно которого производится автоподстройка, принимается то положение, когда длительности сигналов, сформированных блоком 7 и формирователем 8, равны. Сигнал расстройки подается на генератор 10 компенсирующего напряжения, который в зависимости от знака и величины расстройки формирует напряжение соответствующего уровня, которое подается на модулятор 3 с таким знаком, чтобы в результате смещения опорного зеркала 2 сигнал расстройки уменьшался до нуля. Перемещение опорного зеркала непрерывно измеряется датчиком 11 перемещения. Формирователь 2 сигнала допустимой ошибки формирует сигнал,длительность которого задает максимальный сигнал расстройки.
В блоке 13 осуществляется сравнение сигнала допустимой ошибки,сфор- мированнот о формирователем 12, и сигнала расстройки, сформированного формирователем 9.
Если сигнал расстройки меньше величины, заданной формирователем 12, блок 13 сравнения формирует сигнал управления, который подается на вычислительный блок 14, и показания дат чика I1 перемещения опорного зеркала записываются в память вычислительного блока 14.
Если сигнал расстройки больше сигнала допустимой ошибки, производится автоматическая подстройка, заключ аю- щаяся в дополнительном изменении разности хода интерферирующих лучей в сторону уменьшения сигнала расстройки, преобразовании фотоэлектрическо- го сигнала, полученного на выходе фотоприемника 5 при сканировании того же п-го сечения интерференционного поля в блоке 7, сравнении его с сигналом фиксированной длительности и .формировании последующего сигнала расстройки, сравнении его с сигналом допустимой ошибки. Эти onepaiftiH производятся до тех пор, пока сигнал
расстройки не станет меньше сигнала
допустимой ошибки. Тогда блок 13 сравнения сформирует сигнал управления и в память вычислительного блока 14 попадают только те отсчеты датчика I I перемещений, когда отклонение центра ахроматической полосы от начального положения не превьш1ает заданной величины, которая может быть выбрана достаточно малой,
После того, как в данном сечении интерференционного поля сделано необходимое для статистического усреднения число отсчетов, вычислительный блок 14 выдает команду на отклоняющую систему фотоприемника 5 и произ водится измерение в следующем сечении
Пусть в п-м сечении интерференционного поля в результате преобразования интерференционной картины в периодически повторяюш;ийся фотоэлектри- ческий сигнал относительно начала каждого периода такого преобразования зарегистрировано временное положение t;, пика сигнала (фиг,1а), соответствующего ахроматической полосе, кото- рое совпадает с выбранным за начальное положением to .Пусть в ri+1 сечении в силу изменения профиля исследуе,-
с
-)0 f52030
40
3-5
.
«
55
мой поверхности (например, наличия ступеньки на ней) должно б1з1ть зарегистрировано значение t , Сразу же после перехода в п+1 сечение начинает формироваться сигнал расстройки
it. (фиг,16), и разность хода интерферирующих пучков начинает уменьшаться, пока сигнал, соответствующий ахроматической полосе, не займет начальное временное положение. Но и после того, как подстройка произошла, сигнал расстройки все равно имеет место за счет отклонений положения ахроматической полосы из-за, например, воздействия акустических шумов. При статическом усреднении с помощью ЭВМ цифровых кодов для обработки используются все отсчеты, связанные как с переходным процессом подстройки, так и с флуктуациями разности хода интерферирующих лучей, и величина t- будет измерена с погрешностью At
ТТР среднее отклонение
показаний, К - степень усреднения (число отсчетов в каждом сечении ин- терференционно.го поля) , Поскольку известно, что истинному отсчету соответствует сигнал расстройки bt 0, то,используя для обработки лишь те отсчеты, отклонения которых от нуле- ,вого значения по модулю не превышают величины t, можно исключить отсчеты, связанные с переходными процессами и с флуктуациями, большими , тем самым погрешность измерений будет значительно ниже ut 4U-, при этом должно быть &t дЬ, регулируя величину допустимой ошибки At, можно регулировать погрешность измерений.
Формула изобретени
Способ измерения геометрически- параметров поверхности в интерфер( ционном профилографе белого света, заключающийся в построчном сканировании интерференционного поля, преобразовании интерференционной картины в фотоэлектрический сигнал, выделении в каждом периоде преобразования пика сигнала, связанного с ахроматической полосой, формировании сигнала расстройки, пропорционального разности длительности сигнала положения ахроматической полосы и сигнала фиксированной длительности, изменении разности хода интерферирующих лучей в сторону уменьшения сигнала
расстройки и регистрации вносимой разности хода, отличающий- с я тем, что, с целью повьшения точности измерений, формируют электрический сигнал, длительность которого пропорциональиа допустимой ошибке измерений, сравнивают сигнал расстройки с сигналом допустимой ошибки, если сигнал расстройки больше сигнала допустимой ошибки, дополнительно из- меняют разность хода интерферирующих лучей в сторону уменьшения сигнала расстройки и весь цикл операций повторяют в одной строке сканирования до тех пор, пока сигнал расстройки не станет неньше сигнала допустимой
)1
.at г
Редактор С.Патрушева
Составитель О,Несова Техред И.Ходанич
Заказ 876/41
Тираж 678Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
ошибки, при этом регистрируют внесенную разность хода, а затем сканируют данную строку до тех пор, пока не получат п значений, при которых сигнал расстройки меньше сигнала допустимой ошибки, вычисляют геометрический параметр поверхности в данной строке как среднее статистическое зарегистрированных п значений, аналогично осуществляют сканирование других строк интерференционного поля, а геометрические параметры контролируемой поверхности определяют, анашизируя результаты вычислений, полученных, после сканирования всех строк интерференционного поля.
.at
Корректор М.Шароши
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения геометрических параметров поверхности в интерференционном профилографе белого света | 1988 |
|
SU1575070A2 |
| Устройство для измерения геометрических параметров поверхности | 1986 |
|
SU1350498A1 |
| ИНТЕРФЕРЕНЦИОННЫЙ РЕФРАКТОМЕТР | 1987 |
|
SU1498192A1 |
| Способ измерения колебаний объекта и устройство для его осуществления | 1985 |
|
SU1315793A1 |
| СИСТЕМА РЕГИСТРАЦИИ ИЗМЕНЕНИЙ ПОРЯДКА ИНТЕРФЕРЕНЦИИ В ДИНАМИЧЕСКИХ РЕЖИМАХ | 1988 |
|
SU1561639A1 |
| Устройство для автоматического измерения сдвига ахроматической полосы в интерферометрах | 1981 |
|
SU972210A1 |
| Устройство для измерения сдвига ахроматической полосы в интерферометре | 1988 |
|
SU1551984A1 |
| Устройство для измерения величины и скорости перемещения объекта | 1981 |
|
SU976291A1 |
| Оптическое устройство регистрации вибрации и перемещений | 2024 |
|
RU2837981C1 |
| Устройство для измерения перемещений | 1984 |
|
SU1237908A1 |
Изобретение относится к измерительной техни-ке и может быть использовано для измерения профиля и шероховатости поверхности, а также для определения толщины тонких пленок. Цель изобретения - повьппение точности измерений за счет исключения погрешностей, связанных с переходными процессами при автоподстройке и флук- туациями разности хода плеч интерфе- . рометра. Сущность способа заключается в построчном сканировании интерференционного поля, преобразовании полученного фотоэлектрического сигнала, сравнении его с сигналом фиксированной длительности и формировании сигнала расстройки, пропорционального разности длительностей сравниваемых сигналов, изменении разности хода интерферирующих лучей в стброну уменьшения сигнала расстройки. Цель достигается за счет введения операций формирования сигнала допустимой ошибки и сравнения сигнала расстройки с сигналом допустимой ошибки, в результате которого весь цикл операций повторяется, если сигнал расстройки больше сигнала допустимой ошибки. Для последующей обработки используются лишь те значения разности хода интерферирующих лучей, при которых подстройка произошла с заданной точностью, а все результаты, связаннЬ1е с переходными процессами подстройки и флуктуациями разности хода, исключаются из расчетов геометрических параметров поверхности. 2 ил. i ю со сю Сд 4 ю
| Von S | |||
| Raith | |||
| Feinwerktechnik.- Messtechnik, 1977, v | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Мяльно-трепальный станок | 1921 |
|
SU314A1 |
