1 298
29, предназначенных для установки на них колес испытываемой машины, размещены планетарные механизмы 30 и 31, корпусы которых выполнены с эксцентриситетом и посредством согласующих редукторов 26 и 27 кинематически связаны с корпусами третьего и четвертого дифференциалов. Солнечные niec- терни планетарных механизмов кинематически соединены со вторыми полу- осями этих дифференциалов. Беговые барабаны своей внутренней поверхностью, выполненной также с эксцент1
Изобретение относится к транспортному машиностроению и может быть использовано при ресурсных испытаниях колесных машин.
Цель изобретения - повышение точности воспроизведения эксплуатационных режимов нагружения.
На фиг.1 изображен преддтагаемый стенд,общий вид, на фиг.2 - кинематическая схема стенда, на фиг.3-планетарный механизм, общий вид на фиг.4- разрез А-А на фиг.З.
Стенд содержит раму, выполненную из двух частей 1 и 2, установленных на фундаменте с возможностью продольного перемещения одной относительно другой,, на раме установлены приводной электродвигатель 3, первый дополнительный электродвигатель 4, первый червячный редуктор, червяк 5 которого кинематически соединен с первым дополнительным электродвигателем 4, первый 6 и второй 7 дифферёндиаль;. Первые полуоси 8 и 9 обоих дифференциалов 6 и 7 кинематически соединены с приводным электродвигателем 3. Вторая -полуось 10 первого дифференцигша 6 кинематически соединена с червячным колесом 11 первого червячного редуктора, вторая полуось 12 второго дифференциала жестко соединена с рамой стенда, где установлены также второй дополнительный электродвигатель 13, второй червячный редуктор, червяк 14 которого кинематически соединен со вторым дополнительным электродвигателем 14, третий 15 и четвер578
риситетом, установлрлим на коронных шестернях планетарных механизмов. При вращении приводного электродвигателя приводятся во вращение беговые барабаны. Включением второго дополнительного электродвигателя бессту- пенчато регулируется общий эксцентриситет беговых барабанов и соответственно амплитуда их колебаний. С помощью первого дополнительного электродвигателя бесступенчато регу- ЛИруется фазовый сдвиг колебаний беговых барабанов. 4 ил.
тый 16 дифференциалы, первые полуоси 17 и 18 которых кинематически соединены с червячным колесом 19 второго червячного редуктора, а корпусы 20
и 21 кинематически соединены с корпусами 22 и 23 первого 6.и второго 7 дифференциалов и с входными звеньями 24 и 25 первого 26 и второго 27 согласующих редукторов.
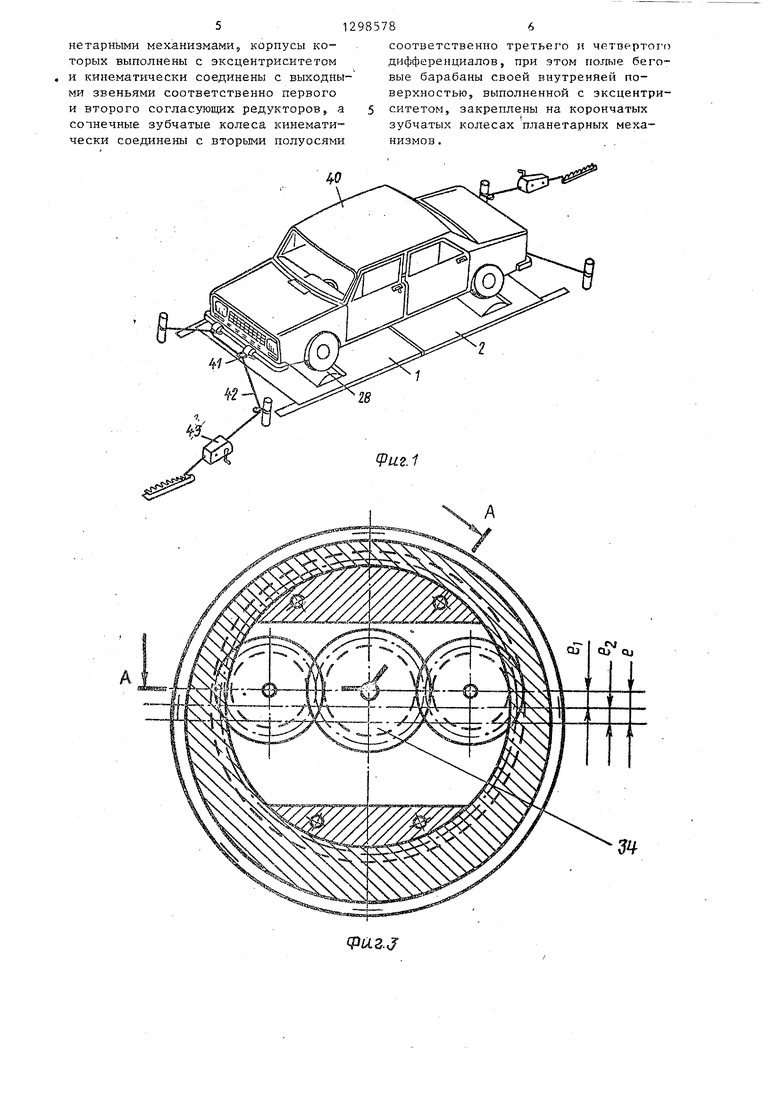
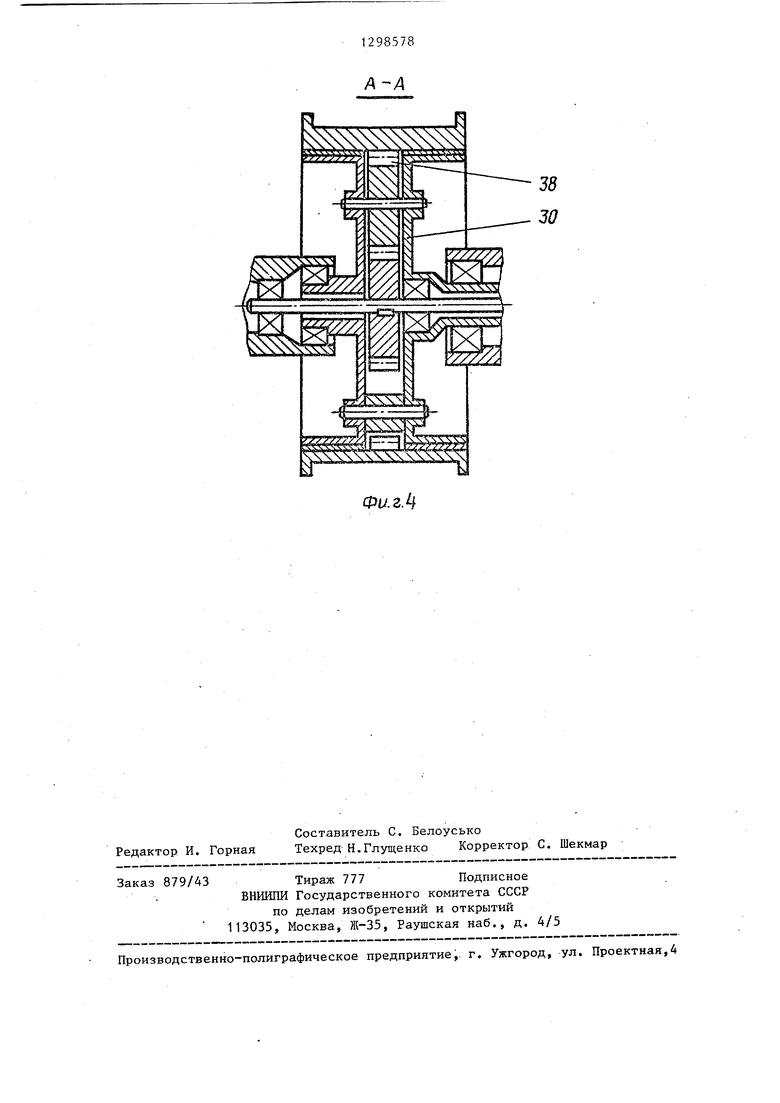
Внутри полых беговьпс барабанов 28 и 29 размещены -планетарные механизмы 30 и 31, корпусы которых выполнены с эксцентриситетом е (фиг.З) и кинематически соединены с выходными звеньями 32 и 33 обоих согласующих редукторов 26 и 27, солнечные зуб4а- тые колеса 34 и 35 кинематически соединены со вторыми полуосями 36 и 37 обоих дифференциалов 15 и 16. Полые
беговые барабаны 28 и 29 своей внутренней поверхностью, выполненной с эксцентриситетом е , (фиг.З), закреп-, лены на корончатых зубчатых колесах 38 и 39 планетарных механизмов.Общий эксцентриситет может изменяться ,от нуля до суммы е е, + е. Для контроля взаимного положения полых беговых барабанов 28 и 29 относительно корпусов планетарных механизмов 30 и 31 стеНд снабжен измерительной системой (не показана),имеющей вольтметр, включенный в диагональ потен- циометрического моста, в одно из плеч которого включен переменный резистор, связанный с выходным звеном соответствующего согласующего редуктора .
Испытываемая колесцая машина 40 установлена на полые беговые барабаны и зафиксирована на них посредством захватов 41, троса 42 и лебедки .43 .
. При работе приводного электродвигателя 3 корпусы 22 и 23 первого 6 и второго 7 дифференциалов вращаются с одинаковыми угловыми скоростями, так как вторая полуось 10 первого дифференциала 6 заторможена червяком 5, а вторая полуось 12 второго дифференциала 7, жестко связана с рамой стенда.
Через конические зубчатые пары вращение с корпусов 22 и 23 первого 6 и второго 7 дифференциалов передается на корпусы 20 и 21 третьего 15 и четвертого 16 дифференциалов.
Так как первые полуоси 17 и 18 третьего 15 и четвертого 16 дифференциалов заторможены червяком 14, угловые скорости вращения вторых полуосей 36 и 37 в два раза больше угловых скоростей вращения корпусов 20 и 21. При помощи согласующих редукторов 26 и 27 эти угловые скорости выравниваются. В результате солнечные зубчатые колеса 34 и 35 и корпусы планетарных механизмов 30 и 31 вращаются с одинаковыми угловыми скоростями.
В этом случае полые беговые барабаны 28 и 29 воспроизводят вращение с постоянным эксцентриситетом или без него в зависимости от взаимного положения корпуса планетарного механизма 30 и 31 относительно внутренней цилиндрической поверхности полых беговых барабанов 28 и 29.
Для изменения общего эксцентриситета е, т.е. амплитуды колебаний наружной поверхности полых беговых барабанов 28 и 29, включают второй дополнительный электродвигатель 13, который через второй червячный редуктор приводит во вращение первые полуоси 17 и 18 третьего 15 и четвертого 16 дифференциалов, при этом угловые скорости вращения вторых полуосей 36 и 37 этих дифференциалов изменяются, и угловые скорости вращения солнечных зубчатых колес 34 и 35 и корпусов планетарных механизмов 30 и 31 различны. При этом полые беговые барабаны 28 и 29 при помощи сателлитов и корончатых зубчатых колес 38 и 39 поворачиваются относи0
5
0
5
0
5
0
5
0
5
тельно корпусов планетарных механизмов 30 и 31, и общий эксцентриситет е изменяется. В результате изменяется амплитуда колебаний наружной поверхности полых беговых барабанов.
Для сдвига фаз колебанз й полых беговых барабанов 28 и 29 включают первый дополнительный электродвигатель 4, который через первый червячный редуктор приводит во вращение вторую полуось 10 первого дифференциала 6. При этом угловые скорости вращения корпусов 22 и 23 первого 6 и второго 7 дифференциалов различны. В результате колебания полых беговых барабанов 28 и 29 происходят с фазовым сдвигом одно отпоснтельно другого.
Формула изобретения
Стенд для испытания колесных машин, содержащий раму, полые беговые , барабаны5 установленные на раме с регулируемым эксцентриситетом, и приводной электродвигатель, кинематически связанный с полыми беговыми барабанами, отличающийся тем, что, с целью повышения точности воспроизведения эксплуатационнь гх реш-гмов нагружения, он снабжен первым дополнительным электродвигателем, первым червячным редуктором, червяк которого кинематически связан с первым дополнительным электродвигателем, первым и вторым дифференциалами, пер вые полуоси которых кинематически соединены с приводным электродвигателем, вторая полуось первого дифференциала кинематически соединена с червячным колесом первого червячного редуктора и вторая полуось второго дифференциала жестко соединена с рамой, вторым дополнительным электродвигателем,вторым червячным редуктором, червяк ко- Topoi o кинематически соединен с вторым дополнительным электродвигателем, третьим и четвертым дифференциалами, первые полуоси которых кинематически соединены с червячным-колесом второго червячного редуктора, а корпусы - с корпусами соответственно первого и второго дифференциалов, первым и вторым согласующими редукторами, входные звенья которых кинематически соединены с корпусами соответственно третьего и четвертого дифференциалов, и размещенными внутри полых беговых барабанов .первым и вторым пла51
нетарными механизмами, корпусы которых выполнены с эксцентриситетом и кинематически соединены с выходны ми звеньями соответственно первого и второго согласующих редукторов, а солнечные зубчатые колеса кинематически соединены с вторыми полуосями
6
соответственно третьего и четвертого дифференциалов, при этом полые беговые барабаны своей внутренней поверхностью, выполненной с эксцентриситетом, закреплены на корончатых зубчатых колесах планетарных механизмов.
.2.1
QJ
ФйгJ
Редактор И. Горная
Составитель С. Белоусько
Техред Н.Глущенко Корректор С. Шекмар
879/43
Тираж 777Подписное
ВНИИ1Ш Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,, г. Ужгород, ул. Проектная,4
Фи.гА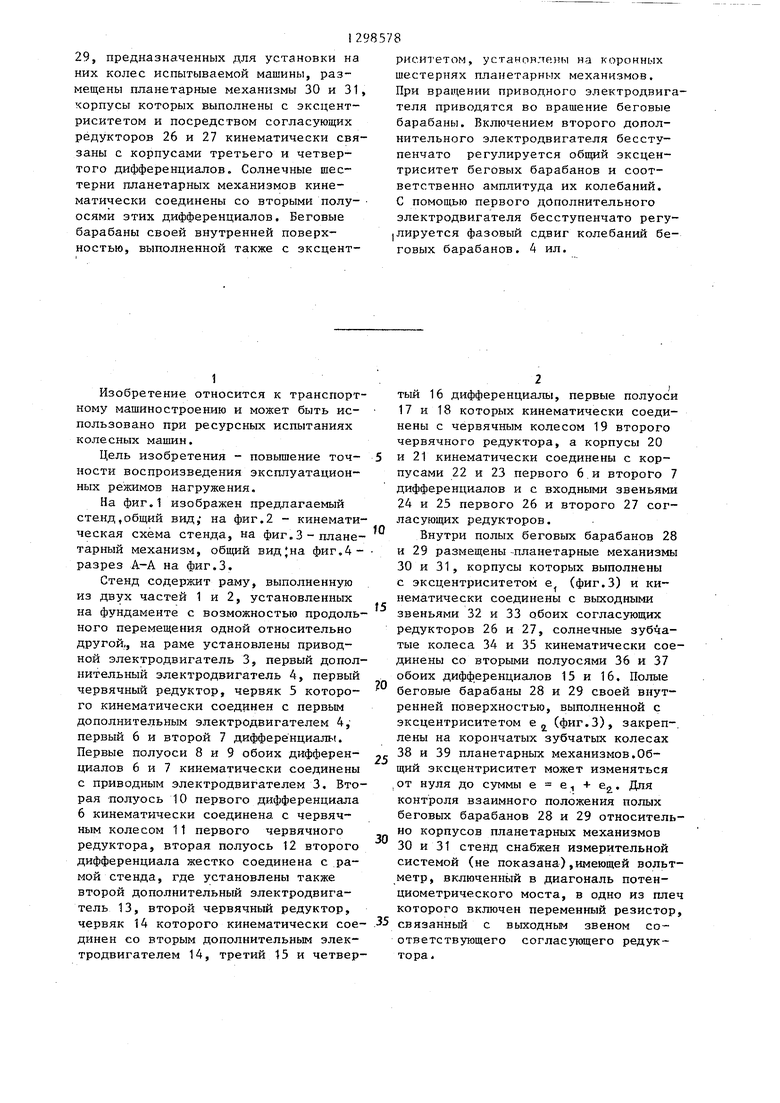

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2011 |
|
RU2598448C2 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Стенд для испытания дифференциалов | 1987 |
|
SU1446514A1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Устройство для выравнивания скорости ножей летучих ножниц | 1980 |
|
SU975256A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Устройство орбитального перемещения при электроэрозионной обработке | 1982 |
|
SU1068246A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
Изобретение относится к транспортному машиностроению. Цель изобретения - повышение точности воспроизведения эксплуатационных режимов нагружения. Стенд содержит приводной электродвигатель 3, кинематически соединенный с первыми полуосями первого и второго дифференциалов 6 и 7, первый дополнительный электродвигатель 4, кинематически соединенный посредством первого червячно7 го редуктора со второй полуосью первого дифференциала. Вторая полуось второго дифференциала жестко соединена с рамой стенда. Корпусы первого и второго дифференциалов кинематически соединены с корпусами соответственно третьего и четвертого дифференциалов 15 и 16. Второй дополнительный электродвигатель 13 посредством второго червячного редуктора кинематически соединен с первыми полуосями третьего и четвертого дифференциалов. Внутри полых беговых барабанов 28 и 29 J/ f ,7 jj сл rs:) cr CX5 сл OO Фиг. г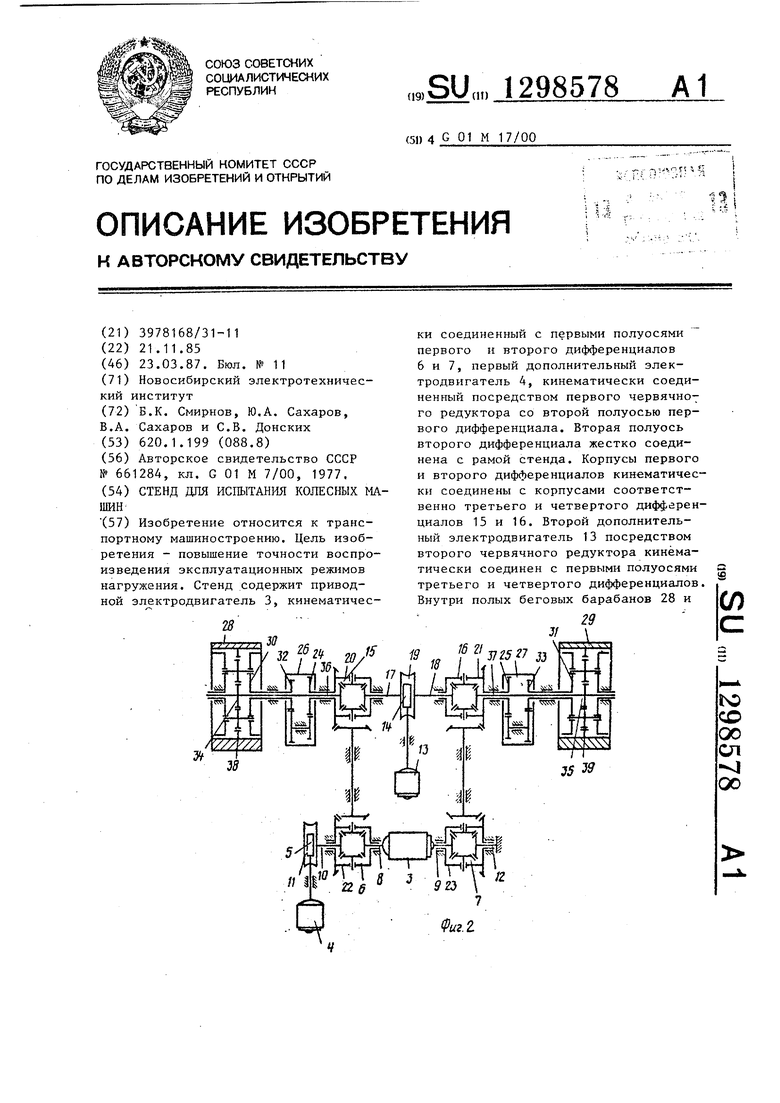
| Стенд для испытания колесных машин на надежность и долговечность | 1977 |
|
SU661284A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
