1
Изобретение относится к технике еразрушающего контроля механических войств ферромагнитных изделий элекромагнитным методом с помощью датчиков с расПределен НыАи параметрами может быть использовано для разбраковки изданий по твердости.
Цель изобретения - повышение точости при контроле твердости изделий з сталей, имеющих нелинейную завиимость магнитных параметров от меанических свойств.
На фиг.1 приведена структурная лектрическая схема устройства- для неразрушающего контроля ферромагнитных изделий; на фиг.2 - зависимость напряжения третьей гармоники выходного сигнала У первого индукционного преобразователя и разностного напряжения и , с измерительной обмотки второго индукционного преобразоватея от твердости изделий из стали 45 X 1 .
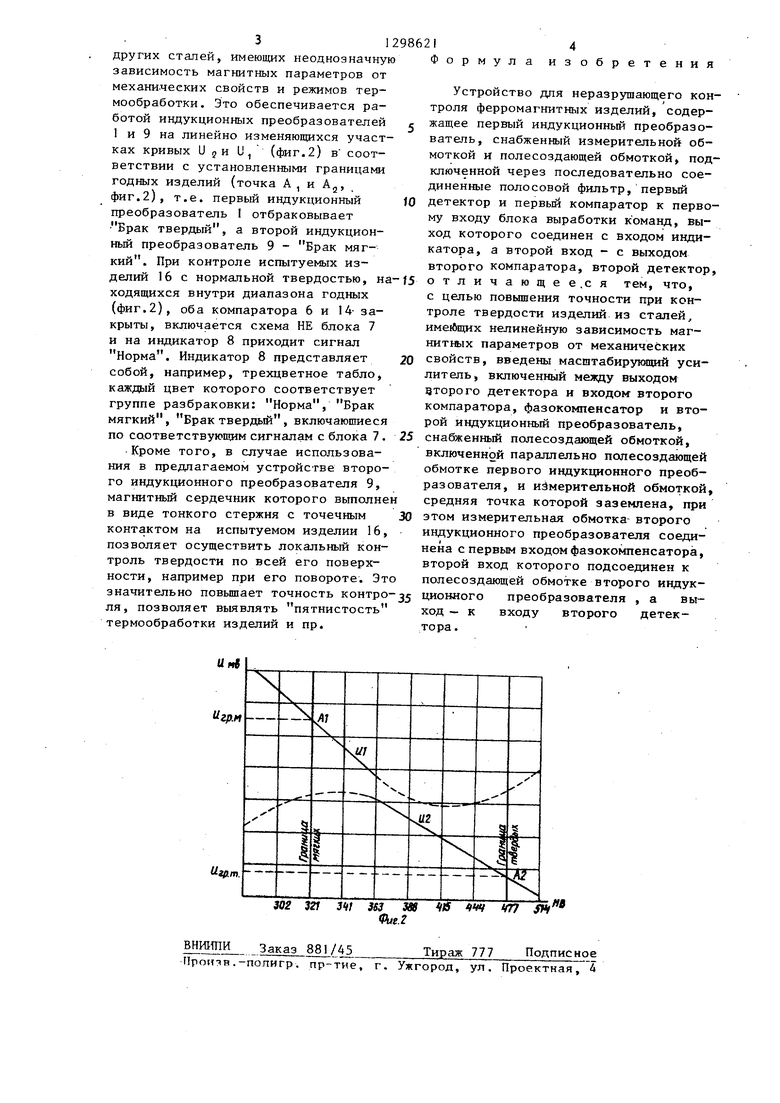
Устройство для неразрушающего контроля ферромагнитных изделий- со- дерзкит первый индукционшт преобразователь 1 с полесоздшощей 2 и измерительной 3 обмотками, полосовой фильтр 4, первый детектор 5, первый компаратор 6, блок 7 выработки команд, индикатор 8, второй индукционный преобразователь 9 с полесоздаш- щей обмоткой 10 и измерительной обмоткой П, фазокомпенсатор 12, второй детектор 13, второй компаратор 14, масштабирующий усилитель 15.
Устройство неразрушающего контроля ферромагнитных изделий работает следующим образом.
Испытуемое изделие 16 помещается между двумя накладными индукционными преобразователями 1 и 9. Ток задающе го генератора (не показан), протекая через полесоздающую обмотку 2 первого индукционного преобразователя 1, наводит в испытуемом изделии 16 переменное магнитное поле, которое индуцирует в измерительной обмот ке 3 вторичную.ЭДС. Сигнал с измерительной обмотки 3 подается на полосо вой фильтр 4,- в котором происходит выделение, например, третьей гармони ки вторичной ЭДС. С выхода полосового фильтра 4 напряжение третьей гармоники поступает на вход первого детектора 5, который выпрямляет его и масштабирует. Сигнал постоянного напряжения с выхода первого детектора
986212
5 поступает на вход первого компаратора 6.
Одновременно сигнал с измерительной обмотки 11 второго индукционного
5 преобразователя 9 поступает на первый вход фазокомпенсатора 12, на второй вход которого поступает сигнгш с по- лесоздающе обмотки Ш. Фазокомпенсатором 12 производится подстройка фаtO зы и уровня сигнала так, что образцовой, (годной) детали напряжение на выходе фазокомпенсатора 12 равняется нулю. При наличии испытуемого изделия 16, отличающегося от образцовой
15
детали, разностное напряжение с вы25
хода фазокомпенсатора 12 поступает на вход второго детектора 13,, с выхода которого сигнал поступает на вход масштабирующего усилителя 15, Масшта20 бированный по амплитуде сигнгш поступает на вход второго компаратора 14.
Таким образом, в процессе контроля на вход первого компаратора 6 поступает сигнал с первого детектора 5, а на вход второго компаратора 14 через масштабирующий усилителъ 15 - с выхода второго детектора 13. Установка напряжения срабатывания компа раторов 6 и 14 по заданным граничным значениям твердости испытуемых изДе- лий производится от источников напряжения Е уст(не показаны), причем уста новка границы срабатывания компарато35 ра 6 производится по минимально допустимому значению твердости (точка А, фиг.2), а установка границы срабатывания компаратора 14 - по максимально допустимому значению
40 твердости (точка А, фиг.2). Границы срабатывания устанавливаются в соответствии со штатной термообработкой изделий на образцовых изделиях, используемых также при настрой45 ке и калибровке приборов перец работой и испытаниями.
С выходов компараторов 6 и 14 сигналы поступают на вход блока 7, вы- сп полненного на микросхемах цифровой
логики, например И-НЕ или ИЛИ-НЁ, в котором вырабатываются команды Брак
твердый и Брак мягкий, а при отсутствии сигналов с компараторов гг команда Норма.
Таким образом, предлагаемое устройство позволяет надежно разбраковывать по твердости испытуемые изделия 16 из СТШ1И 45 X I, а такке ия
312
других сталей, имеющих неоднозначную зависимость магнитных параметров от механических свойств и режимов термообработки. Это обеспечивается работой индукционных преобразователей 1 и 9 на линейно изменяющихся участках кривых и и и, (фиг,2) в соответствии с установленными границами годных изделий (точка А , и А, . фиг.2), т.е. первый индукционный преобразователь I отбраковывает Брак твердый, а второй индукционный преобразователь 9 - Брак мягкий. При контроле испытуемых изделий 16 с нормальной твердостью, на ходящихся внутри диапазона годных (фиг.2), оба компаратора 6 и 14- закрыты, включается схема НЕ блока 7 и на индикатор 8 приходит сигнал Норма. Индикатор 8 представляет собой, например, трехцветное табло, каждый цвет которого соответствует группе разбраковки: Норма, Брак мягкий, Брак твердый, включающиеся по саответствующим сигналам с блока 7 .
Кроме того, в случае использования в предлагаемом устройстве второго индукционного преобразователя 9, магнитный сердечник которого вьтолне в виде тонкого стержня с точечным контактом на испытуемом изделии 16, позволяет осуществить локальный контроль твердости по всей его поверхности, например при его повороте. Эт
значительно повьппает точность контро-з5 ля, позволяет вьивлять термообработки изделий и пр.
пятнистость
игр.н
I4
Формула изобретения
Устройство для неразрушающего контроля ферромагнитных изделий, содержащее первый индукционный преобразователь, снабженный измерительной обмоткой и полесоздающей обмоткой, подключенной через последовательно соединенные полосовой фильтр, первый детектор и первый компаратор к первому входу блока выработки к оманд, выход которого соединен с входом индикатора, а второй вход - с выходом второго компаратора, второй детектор отличающее.с я тем, что, с целью повышения точности при контроле твердости изделий из сталей, имейщих нелинейную зависимость маг- нити,1х параметров от механических свойств, введены масштабирующий усилитель, включенный между выходом дторого детектора и входок второго компаратора, фазокомпенсатор и второй индукционный преобразователь, снабженный полесоздающей обмоткой, включенной параллельно полесоздающей обмотке первого индукционного преобразователя, и измерительной обмоткой средняя точка которой заземлена, при этом измерительная обмотка- второго индукционного преобразователя соединена с первым входом фазокомпенсатора, второй вход которого подсоединен к полесоздающей обмотке второго индукционного преобразователя , а выход - к входу второго детектора . 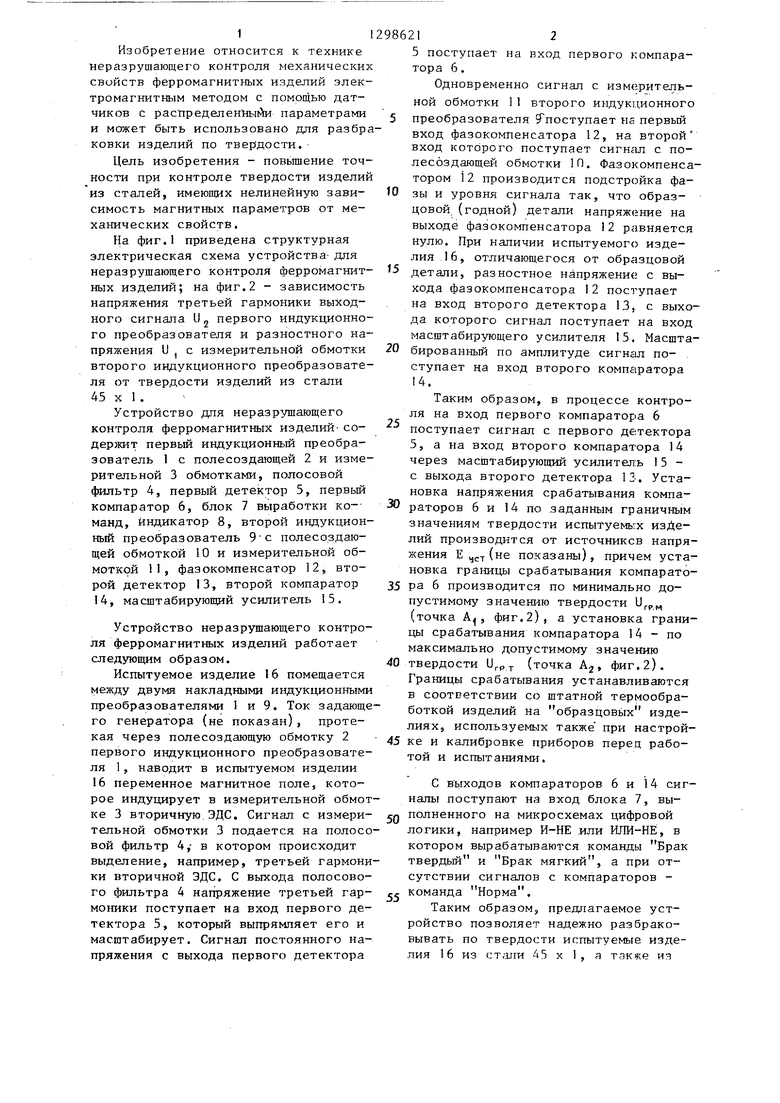
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для неразрушающегоКОНТРОля фЕРРОМАгНиТНыХ издЕлий | 1979 |
|
SU819684A1 |
| Устройство для неразрушающего контроля механических свойств ферромагнитных изделий | 1981 |
|
SU954871A1 |
| Устройство для неразрушающего контроля качества термообработки | 1989 |
|
SU1702285A1 |
| Динамический индикатор физических величин | 1986 |
|
SU1800270A1 |
| Устройство для контроля твердости ферромагнитных изделий | 1991 |
|
SU1779988A1 |
| Устройство для неразрушающего контроля качества термообработки изделий | 1991 |
|
SU1778667A1 |
| Устройство для контроля степени деформации ферромагнитных изделий | 1986 |
|
SU1341569A1 |
| Устройство для контроля качества ферромагнитных деталей | 1987 |
|
SU1456863A1 |
| Способ неразрушающего контроля методом высших гармоник и устройство для его осуществления | 1988 |
|
SU1599757A1 |
| Электромагнитно-акустический преобразователь | 1985 |
|
SU1280513A1 |
Изобретение обеспечивает повышение точности при контроле твердости изделий из сталей, имеющих нелинейную зависимость магн.параметров от механических свойств. Испытуемое изделие (ИИ) 16 помещают между двумя индукционными преобразователями (ИП) I, 9, имеющими полесоздающие обмотки 2, 10 и измерительные обмотки 3, 11 соответственно. Сигнал, ин- дуцируемьй в измерительную обмотку 3, через полосовой фильтр 4, выделяю МпПл щий гармонику вторичной ЭДС, и детектор 5, выпрямляющий и масштабирующий сигнал, поступает на компаратор 6. Сигнал с измерительной обмотки 11 поступает на фазокомпенсатор 12, на другой вход которого поступает сигнал с полесоздакяцей обмотки 10. Фазокомпенсатором I2 производится подстройка фазы и уровня сигнала таким образом, чтобы для годной детали напряжение на его выходе равнялось нулю. Если ИИ 16 отличается от образцового, разностный сигнал через детектор 13 и масштабирующий усилитель 15 поступает на компаратор 14. Компаратор 6 срабатывает по миним., а компаратор 14 - по макс. допустимом значениям твердости ИИ. С компараторов 6, 14 сигналы поступсшт на блок 7 выработки команд, который формирует команды брак твердый (по сигналу с компаратора 6),, брак мягкий (по сигналу с компаратора 14) и норма (при отсутствии сигналов с компараторов 6, 14). Формируемые команды поступают на индикатор 8. 2 ил. ts (Л to со 00 О5 to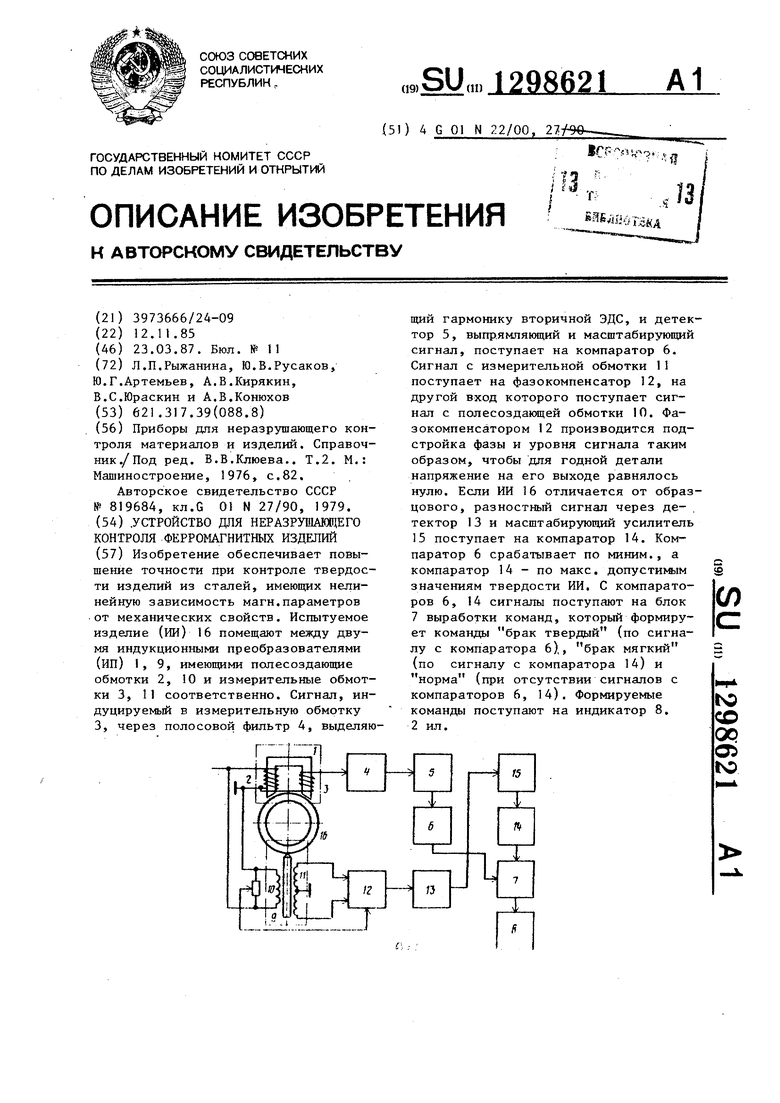
| Приборы для неразрушающего контроля материалов и изделий | |||
| Справочник./ Под ред | |||
| В.В.Клюева. | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Машиностроение, 1976, с.82 | |||
| Устройство для неразрушающегоКОНТРОля фЕРРОМАгНиТНыХ издЕлий | 1979 |
|
SU819684A1 |
