Изобретение относится к аналоговой вычислительной технике, предназначено для моделирования движения частиц вбрасываемых в движущуюся газовую среду, и может быть использовачо при моделировании движения частиц смета во всасывающем трубопроводе подме- ,тально-уборочной машины.
При создании рабочих органов под- метально-уборочных машин исследуют характер движения частиц смета,забрасываемых щеткой или лопастью в сопло всасывающего трубопровода.После забрасывания частицы смета движутся вначале по инерции, а затем - под дей- етвием потока воздуха, создаваемого на входе всарывающего трубопровода.
Цель изобретения - расширение функциональных возможностей за счет моделирования движения твердых части в движущейся газовой среде,
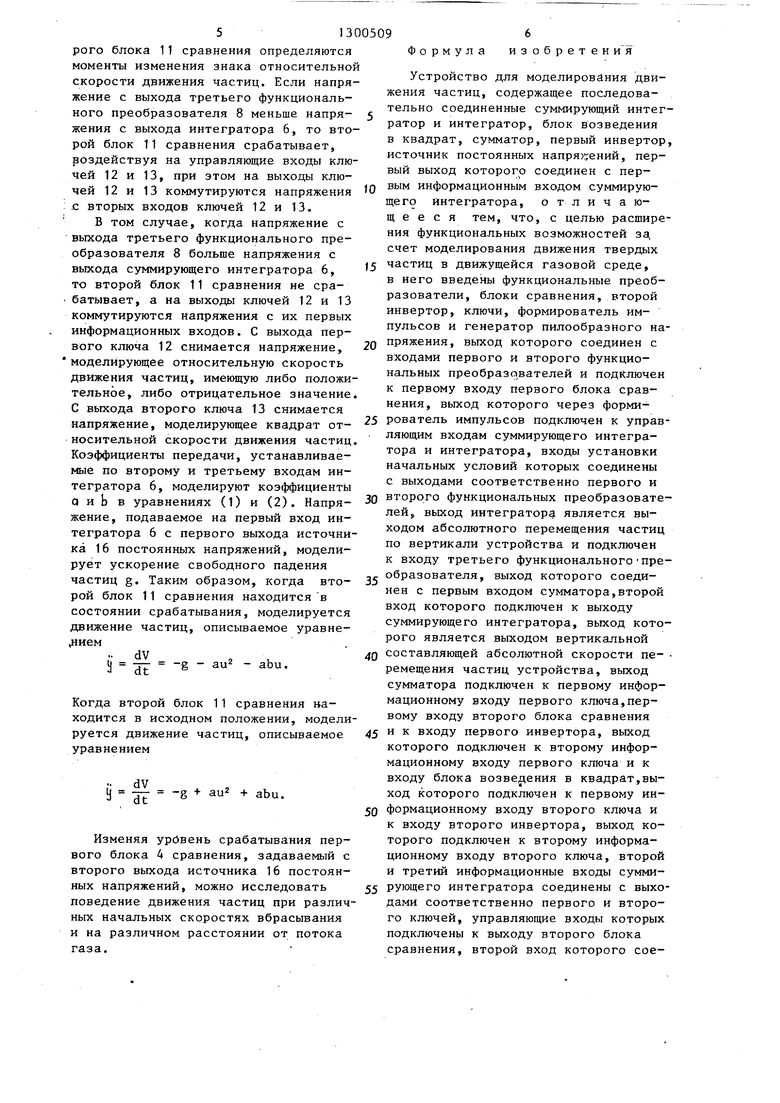
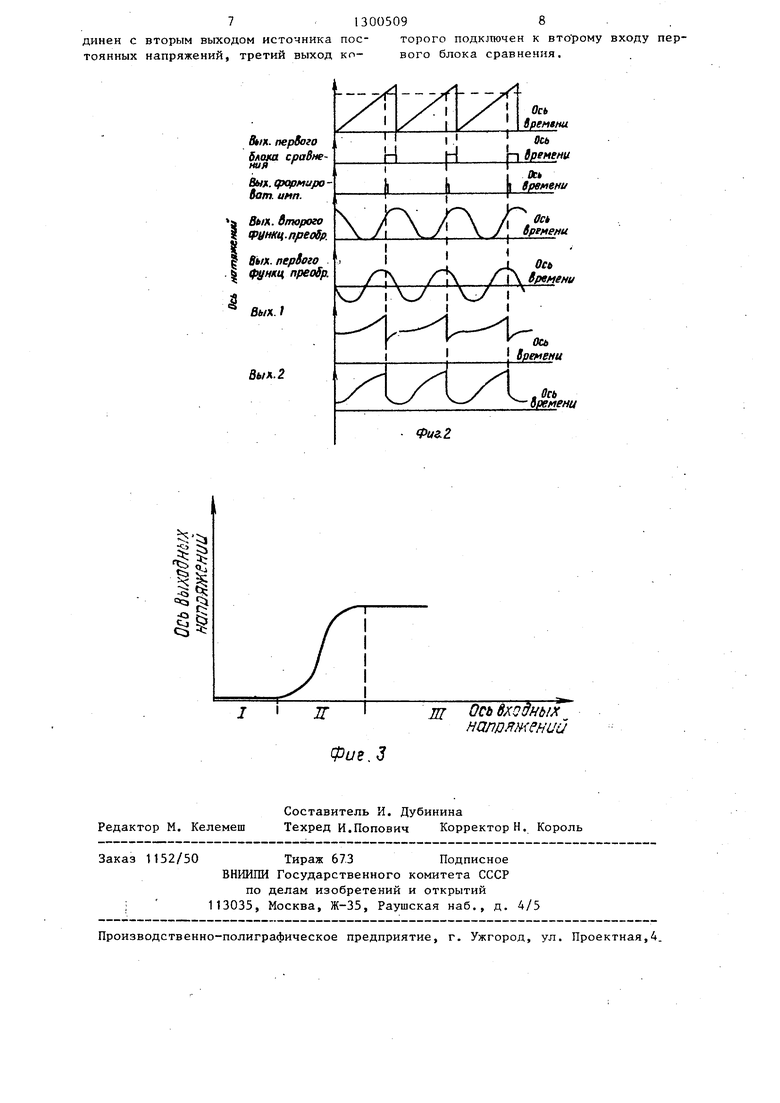
На фиг. 1 приведена блок-схема предложенного устройства; на фиг.2 диаграммы напряжений, поясняющие его ра- боту; на фиг.З - функциональная зависимость, воспроизводимая третьим функциональным преобразователем.
Устройство для моделирования движения частиц содержит генератор 1 пи лообразного напряжения, первый и второй функциональные преобразователи 2. и 3, первый блок 4 сравнения, формирователь 5 импульсов, суммирующий интегратор 6 и интегратор 7., третил функциональный преобразователь 8,сумматор 9, первый инвертор 10,, второй блок 11 сравнения, первый и второй ключи 12 и 13, блок 14 возведения в квадрат, второй инвертор IS, источ- ник 1 постоянных напряжений.
При моделировании движения твердых частиц под действием потока газа , принимаем, что частицы, которым задана начальная скорость, вначале движутся в неподвижной газовой среде а затем по мере перемещения попадают в движущийся поток газа. При движени в неподвижной газовой среде скорость частиц с течением времени падает, при попадании частиц в поток газа их скорость начинает возрастать,приближаясь по. своему значению к скорости потока газа. Подобная ситуация возникает, например, при работе подме- тально-уборочной машины, когда частицы смета механически подбрасываются лопастью в сторону сопла всасывающего трубопровода с некоторой на
чальной скоростью, а затем, попадая в поток воздуха во всасывающем трубопроводе, транспортируются в нем. Механическое забрасывание смета лопастью производится периодически.После срыва с лопасти частицы движутся в вертикальной плоскости.
Когда абсолютная скорость частиц (V) меньше скорости газа (щ), движение частиц описывается уравнением
dV dt
-- -в + au + abu
(1)
f5
Когда абсолютная скорость частиц (V) больше скорости газа (со), движение частиц описывается уравнением .
У
dV dt
-g - аи
2
abu ,
(2)
5
О
где ij
V g t u
a 5
0
5
ускорение движения частиц по вертикали;
абсолютная скорость движения частиц по вертикали; ускорение свободного падения; время;
относительная скорость частиц;
коэффициент, зависящий от плотности частиц, плотности газа, диаметра частиц,стесненности движения частиц вследствие их взаимодействияi коэффициент, зависящий от диаметра частиц, кинематического коэффициента вязкости газа.
Относительная скорость движения частиц U определяется из уравнения
U со - V,
где СО - скорость газа
V - абсолютная скорость движения частиц
относительная скорость движения частиц.
b u а 0,346 К,К К.
(рм-р) d
5
65 К,
где К., К
2
2 d
Кз - d безразмерные коэффициенты;диаметр частиц;
р - плотность материала
частиц;
р - л.потность воздуха; р - кинематическая вязкость,
Устройство для моделирования движения частиц работает следующим образом.
Процесс моделирования движения частиц начинается с задания началь- ных условий с использованием генератора 1 пилообразного напряжения. Линейно изменяющееся напряжение с выхода генерато.ра 1 пилообразного напряжения служит разверткой для пер- вого и второго функциональных преобразователей 2 и 3. Период следования импульсов генератора 1 полообразного напряжения соответствует периоду механического вбрасывания частиц.Пер- вый функциональный преобразователь 2 воспроизводит зависимость перемещения по вертикали конца вращающейся лопасти во времени (фиг.2). За нулевую точку отсчета принято нижнее по- ложение лопасти. На втором функциональном преобразователе 3 набрана зависимость вертикальной составляющей скорости перемещающейся лопасти (фиг.2). Напряжение, изменяющееся ли нейко, с выхода генератора 1 пилообразного напряжения подается на первы вход первого блока 3 сравнения, на второй вход которого подается напряжение с второго выхода источника 16 постоянных напряжений, моделирующее расстояние, на котором происходит отрыв частиц от лопасти. Как только линейно изменяющееся напряжение на выходе генератора 1 пилообразного
напряжения становится равным напряжению, соответствующему отрыву частиц, срабатывает первый блок 4 сравнения, на выходе которого начинает
формироваться импульс, передним фронтом которого запускается формирователь 5 импульсов, на выходе которого
.появляется короткий импульс, поступающий затем на управляющие входы интеграторов 6 и 7. Последние переходят в режим установки начальных усло ВИЙ и находятся в этом режиме до окон;Чания импульса с выхода формирователя 5 импульсов. На интеграторах 6 и 7 устанавливаются напряжения, моделирующие соответственно расстояние, при котором происходит отрыв от лопасти, и вертикальную составляющую
5 0 5 5 0
,5
5
0
скорости отрыва. Данные напряжения на интеграторы 6 и 7 задаются соответственно с первого и второго функциональных преобразователей 2,3, развертывающее напряжение на которые подается с генератора 1 пилообразного напряжения . По окончании импульса с выхода формирователя 5 импульсов интеграторы 6 и 7 переходят в режим интегрирования. Напряжение на выходе интегратора 6 моделирует вертикальную составляющую абсолютной скорости перемещения частиц, а Напряжение на выходе интегратора 7 - абсолютное перемещение частиц по вертикали. На третьем функциональном преобразователе 8 воспроизводится напряжение, моделирующее скорость потока газа, которое зависит от расстояния до места отрыва частиц от лопасти. Напряжение на выходе третьего функционального преобразователя изменяется в зависимости от напряжения на выходе второго интегратора 7, моделирующего изменения расстояния частиц от точки отрыва. Вид зависимости, воспроизводимой третьим функциональным преобразователем 8, приведен на фиг. I - движение частиц в неподвижном газе; же, на входе в трубопровод; III - то же, в трубопроводе. Напряжение с выхода третьего функционального преобразователя 8,,мо- /делирующее скорость потока газа,поступает на второй вход сумматора 9, где оно алгебраически складывается с напряжением, моделирующим абсолютную скорость частиц, поступающих на второй вход сумматора 9 с выхода суммирующего интегратора 6. В результате на выходе сумматора 9 формируется напряжение, моделирующее скорость движения частиц относительно потока газа (относительная скорость частиц).
Напряжение с выхода сумматора 9 поступает через первый инвертор 10 на второй вход первого ключа 12, а также на входы блока 14. На выходе блока 14 формируется напряжение,моделирующее квадрат относительной скорости движения частиц. Напряжение с выхода сумматора 9 поступает также на первый информационный вход первого ключа 12 и на первый вход второго блока 11 сравнения, где сравнивается с нулевым напряжением, поступающим на второй вход второго блока 11 сравнения. Таким образом, с помощью втош
51300509
рого блока 11 сравнения определяются моменты изменения знака относительной скорости движения частиц. Если напряжение с выхода третьего функционального преобразователя 8 меньше напряжения с выхода интегратора 6, то второй блок 11 сравнения срабатывает, воздействуя на управляющие входы ключей 12 и 13, при этом на выходы ключей 12 и 13 коммутируются напряжения .с вторых входов ключей 12 и 13.
В том случае, когда напряжение с выхода третьего функционального преобразователя 8 больше напряжения с выхода суммирующего интегратора 6, то второй блок 11 сравнения не срабатывает, а на выходы ключей 12 и 13 коммутируются напряжения с их первых информационных входов. С выхода первого ключа 12 снимается напряжение,
моделирующее относительную скорость движения частиц, имеющую либо положительное, либо отрицательное значение. С выхода второго ключа 13 снимается напряжение, моделирующее квадрат относительной скорости движения частиц. Коэффициенты передачи, устанавливаемые по второму и третьему входам интегратора 6, моделируют коэ(})фициенты а и Ь в уравнениях (1) и (2). Напряжение, подаваемое на первый вход интегратора 6 с первого выхода источника 16 постоянных напряжений, моделирует ускорение свободного падения частиц g. Таким образом, когда второй блок 11 сравнения находится в состоянии срабатывания, моделируется движение частиц, описываемое уравне- ием
dV dt
20
25
ТГ -g - аи
2
abu.
15 ч 30 в 50 ф
35
40
Когда второй блок 11 сравнения находится в исходном положении, моделируется движение частиц, описываемое уравнением
dV dt
U V
tj -г- -g + au2 + abu.
Изменяя урЬвень срабатывания первого блока 4 сравнения, задаваемый с второго выхода источника 16 постоянных напряжений, можно исследовать поведение движения частиц при различных начальных скоростях вбрасывания и на различном расстоянии от потока газа.
Формула изобретения
0
5
Устройство для моделирования движения частиц, содержащее последова- телгэно соединенные суммирующий интегратор и интегратор, блок возведения в квадрат, сумматор, первый инвертор, источник постоянных напря ений, первый выход которого соединен с первым информационным входом суммирующего интегратора, отличающееся тем, что, с целью расширения функциональных возможностей за, счет моделирования движения твердых частиц в движущейся газовой среде, в него введены функциональные преобразователи, блоки сравнения, второй инвертор, ключи, формирователь импульсов и генератор пилообразного напряжения, выход которого соединен с входами первого и второго функциональных преобразователей и подключен к первому входу первого блока сравнения, выход которого через формирователь импульсов подключен к управляющим входам суммирующего интегратора и интегратора, входы установки начальных условий которых соединены с выходами соответственно первого и 0 второго функциональных преобразователей р выход интегратору является выходом абсолютного перемещения частиц по вертикали устройства и подключен к входу третьего функционального Преобразователя, выход которого соединен с первым входом сумматора,второй вход которого подключен к выходу суммирующего интегратора, выход которого является выходом вертикальной составляющей абсолютной скорости пе- ремещения частиц устройства, выход сумматора подключен к первому информационному входу первого ключа,первому входу второго блока сравнения и к входу первого инвертора, выход которого подключен к второму информационному входу первого ключа и к входу блока возведения в квадрат,выход которого подключен к первому ин- 0 формационному входу второго ключа и к входу второго инвертора, выход которого подключен к второму информационному входу второго ключа, второй и третий информационные входы суммирующего интегратора соединены с выходами соответственно первого и второго ключей, управляющие входы которых подключены к выходу второго блока сравнения, второй вход которого сое5
0
5
5
71300509
вторым выходом источника поснапряжений, третий выход котово
8
торого подключен к вто рому входу первого блока сравнения.
Вып. t
Ось бремени
Ось бремени
tu tpfffiem
;
Ось времени
Ось времени
Ось
8раи,
ени
Вых. 2
, Ось оремени
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования аккумуляторной батареи | 1982 |
|
SU1129629A1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования вентильных преобразователей | 1983 |
|
SU1137491A1 |
| Устройство для моделирования м-фазного вентильного преобразователя | 1974 |
|
SU524200A1 |
| Устройство для моделирования двигателя постоянного тока | 1981 |
|
SU955120A1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Устройство для моделирования вентильного преобразователя | 1981 |
|
SU968829A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1238115A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
Изобретение относится к аналоговой вычислительной технике и предназ- начеро для моделирования движения частиц, вбрасываемых в движущуюся газовую среду. Устройство, например, может быть использовано при моделировании движения частиц смета во всасывающем трубопроводе подметально-убо- рочной машины. Цель изобретения - расширение функциональных возможностей за счет моделирования движения твердых частиц в движущейся газовой среде. Устройство включает генератор .1 пилообразного напряжения, суммирующий интегратор 6,-функциональные преобразователи 2, 3 и 8, формирователь 5 импульсов, первый и второй блоки 4, 11 сравнения, интегратор 7, сумматор 9, инверторы 10 и 15, ключи 12 и 13, блок 14 возведения в квадрат, источник 16 постоянных напряжений. Напряжения на выходах суммирующего интегратора и интегратора моделируют скорости перемещения частиц. С помощью первого блока сравнения определяется момент вбрасывания частиц. Значение относительной скорости частиц моделируется выходным напряжением сумматора. 3 ил. с (Л :х) ел о х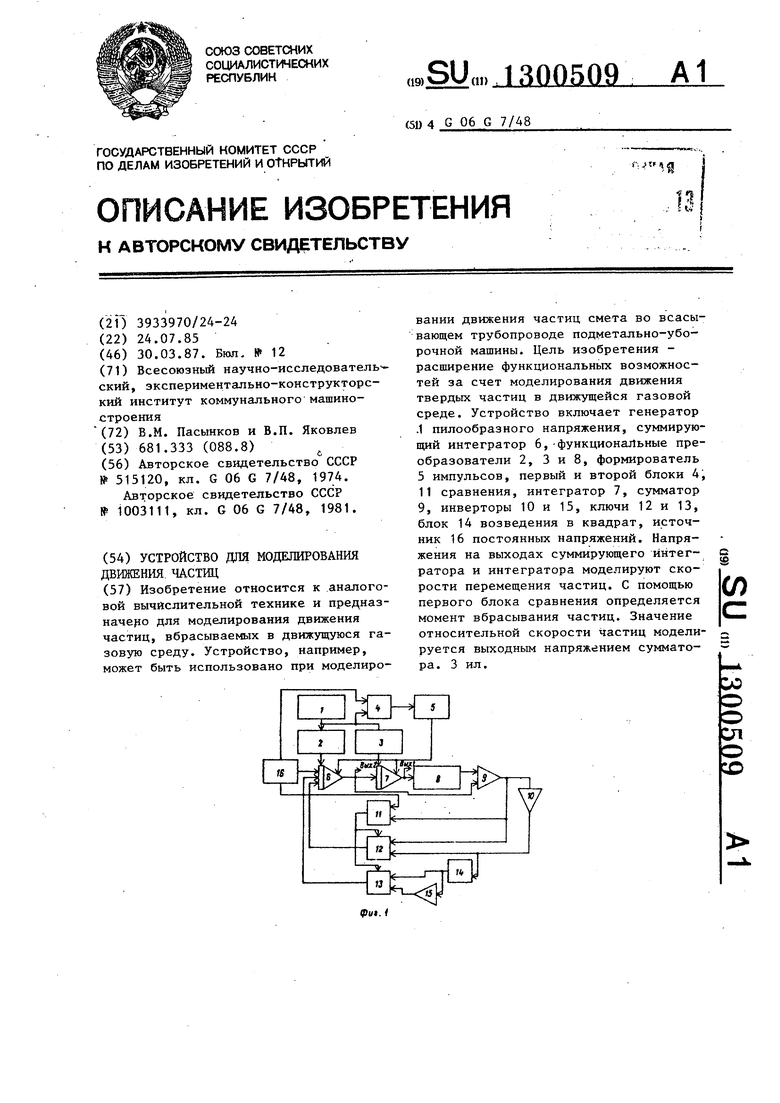
f
а|
с:
Octi бкодных
иалаян ении
Фие.З
Составитель И. Дубинина Редактор М. Келемеш Техред И.Попович Корректор Н. Король
Заказ 1152/50 Тираж 67.3 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4.
| Устройство для меделирования потока газа | 1974 |
|
SU515120A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования движения заряженных частиц | 1981 |
|
SU1003111A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
