( УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИКИ
ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU942069A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| Устройство для моделирования движения гусеничной машины | 2019 |
|
RU2711769C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2410756C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2165646C1 |


1
Изобретение относится к аналоговой вычислительной технике и может быть использовано в тренажерах для обучения водителей гусеничных машин, исследовательских стендах.
По основному авт.св. № 883929 известно устройство для моделирования динамики движения гусеничных машин, содержащее блок моделирования двигателя, выход которого соединен с входом блока моделирования трансмиссии , первый блок моделирования гусеничного движителя, состоящего из сумматора, выход которого через делитель подключен к входу интегратора, первый и второй входы сумматора первого блока моделирования гусеничного движителя соединены соответственно с выходом блока моде:Лирования трансмиссии и с первым выходом датчика вида грунта, первый функциональный преобразователь, выход которого подключен к первому входу первого сумматора, два инвертора, второй функциональный преобразователь , первый блок воспроизведения нелинейности, второй сумматор и второй блок моделирования гусеничного движителя, вход сумматора которого соединен соответственно с выходом блока моделирования трансмиссии и вторым выходом датчика вида грунта, третий выход которого под,и ключен к первым входам функциональных преобразователей, выход второго функционального преобразователя соединен с вторым входом первого сумматора, выход которого подключен
f5 к третьему входу сумматора второго блока моделирования гусеничного движителя и к входу первого инвертора, выход которюго соединен с третьим выходом сумматора первого блока делирования гусеничного движителя, . выход которого через второй инвертор подключен к первому входу второго сумматора, второй вход которого соединен с выходом второго блока
моделирования гусеничного движителя выход второго сумматора через первы блок воспроизведения нелинейности подключен к вторым входам функциональных преобразователей 1.
Недостатком известного устройства является то, что оно не обеспечивает возможности моделирования условий опрокидывания гусеничной машины. Определение этих условий необходимо при обучении водителей гусеничных машин на тренажерах, так как это позволит исключить аварии с тяжелыми последствиями при вождении реальных машин. Кроме того, определение условий опрокидывания необходимо в процессе разработки машин так как устойчивость к опрокидыванию является одной из важнейших характеристик гусеничной машины
Цель изобретения - повышение точности моделирования за счет определения условий опрокидывания гусеничной машины.
Указанная цель достигается тем, что в устройство для моделирования динамики движения гусеничной машины введены третий сумматор, блок деления, блок выделения модуля напряжения, второй блок воспроизведения нелинейности и схема сравнения, причем первый и второй входы третьего сумматора соответственно соединены с выходами первого и второго блоков моделирования гусеничного движителя, выход третьего сумматора подключен к первому входу схемы сравнения, выход которой является выходом устройства, и к первому входу блока деления, второй вход блока деления соединен с выходом второго сумматора, выход блока деления подключен к входу блока выделения модуля напряжения, выход которого соединен с входом второго бл ка воспроизведения нелинейности, выход которого соединен с вторым входом схемы сравнения.
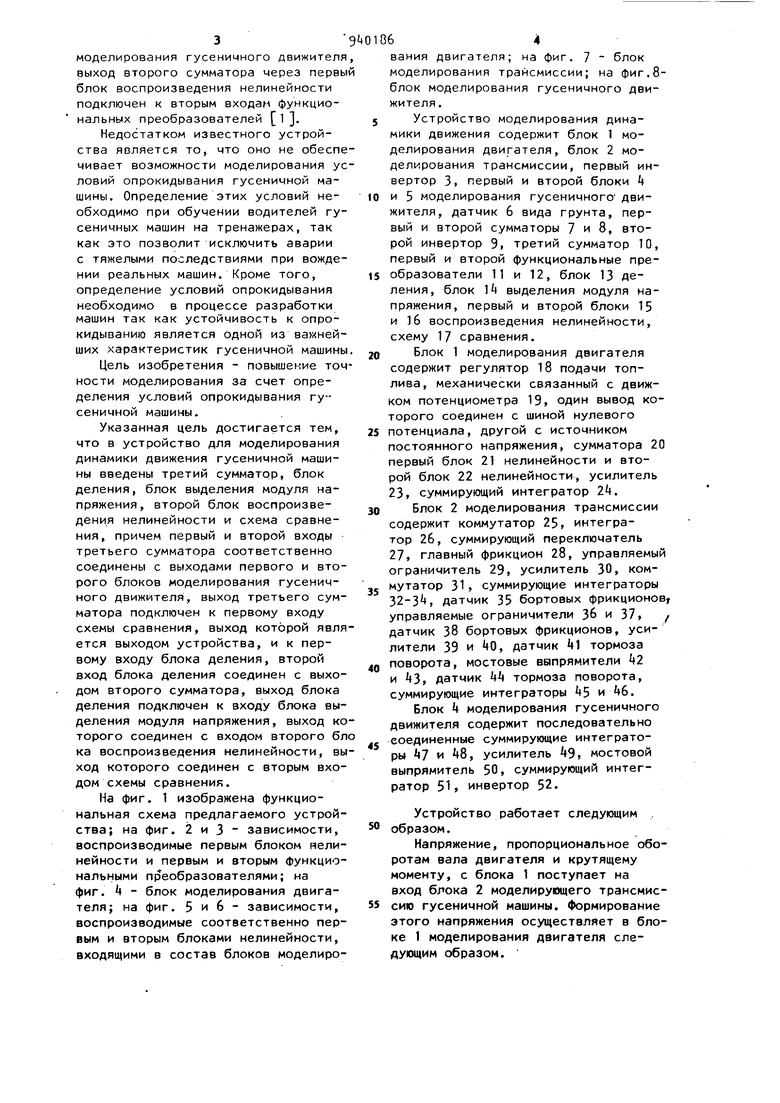
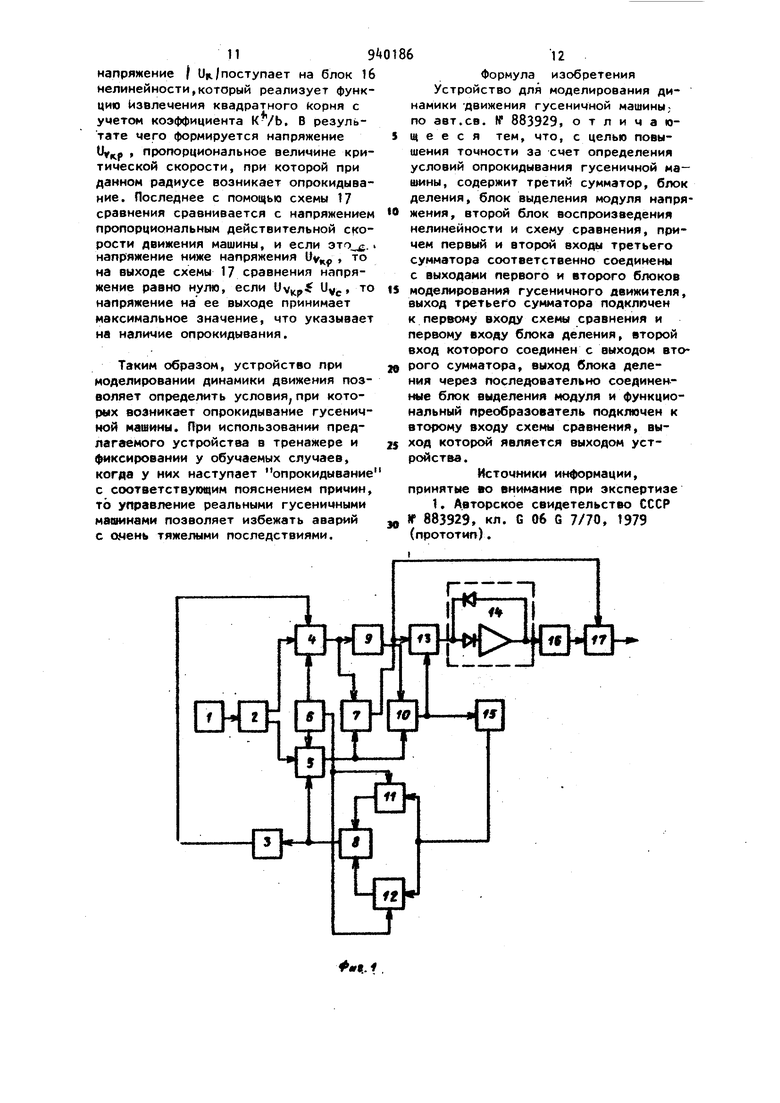
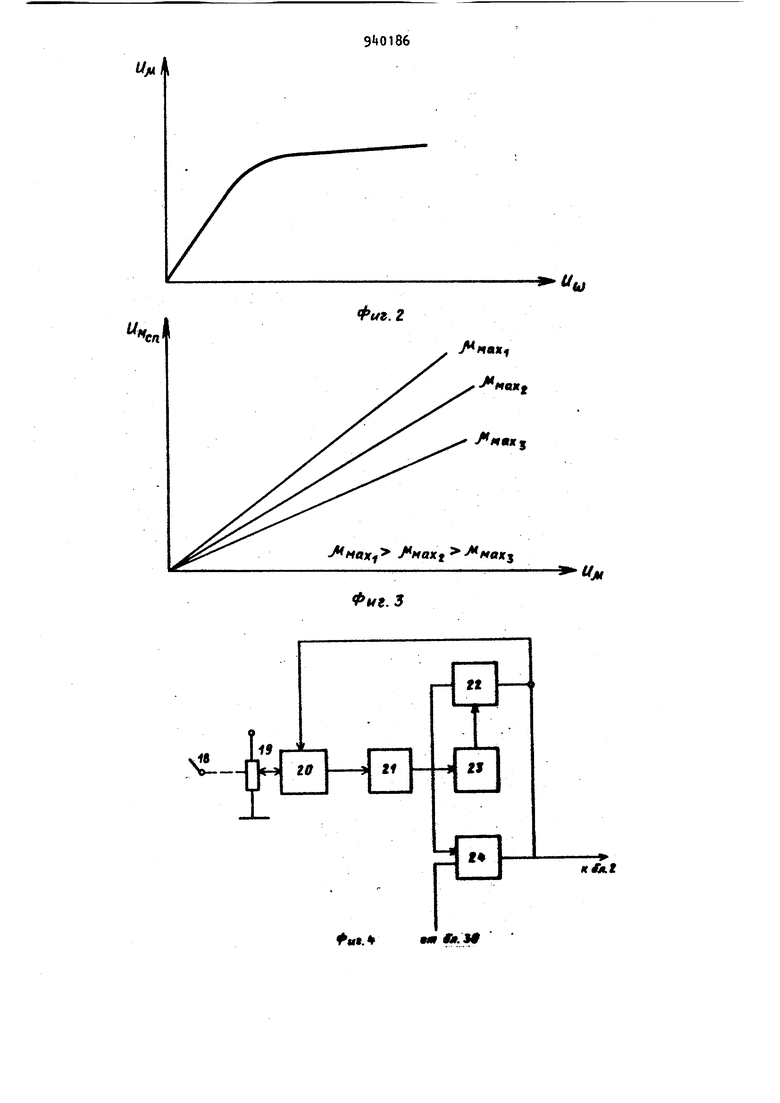
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 и 3 зависимости, воспроизводимые первым блоком нелинейности и первым и вторым функциональными преобразователями; на фиг. 4 - блок моделирования двигателя; на фиг. 5 и 6 - зависимости, воспроизводимые соответственно первым и вторым блоками нелинейности, входящими в состав блоков моделирования двигателя; на фиг. 7 - блок моделирования трансмиссии; на фиг.8блок моделирования гусеничного движителя.
Устройство моделирования динамики движения содержит блок 1 моделирования двигателя, блок 2 моделирования трансмиссии, первый инвертор 3, первый и второй блоки Ц
и 5 моделирования гусеничного движителя, датчик 6 вида грунта, первый и второй сумматоры 7 и 8, второй инвертор 9, третий сумматор 10, первый и второй функциональные преобразователи 11 и 12, блок 13 деления, блок выделения модуля напряжения, первый и второй блоки 15 и 16 воспроизведения нелинейности, схему 17 сравнения.
Блок 1 моделирования двигателя содержит регулятор 18 подачи топлива, механически связанный с движком потенциометра 19, один вывод которого соединен с шиной нулевого
потенциала, другой с источником
постоянного напряжения, сумматора 20 первый блок 21 нелинейности и второй блок 22 нелинейности, усилитель 23, суммирующий интегратор .
Блок 2 моделирования трансмиссии содержит коммутатор 25, интегратор 2б, суммирующий переключатель 27, главный фрикцион 28, управляемый ограничитель 29, усилитель 30, коммутатор 31, суммирующие интеграторы 32-3, датчик 35 бортовых фрикционов, управляемые ограничители Зб и 37, / датчик 38 бортовых фрикционов, усилители 39 и 0, датчик 1 тормоза поворота, мостовые выпрямители k2 и 3, датчик Ц тормоза поворота, суммирующие интеграторы 45 и «б.
Блок k моделирования гусеничного движителя содержит последовательно соединенные суммирующие интеграторы k7 и 48, усилитель 9, мостовой выпрямитель 50, суммирующий интегратор 51, инвертор 52.
Устройство работает следующим
образом.
Напряжение, пропорциональное оборотам вала двигателя и крутящему моменту, с блока 1 поступает на вход блока 2 моделирующего трансмиссию гусеничной машины. Формирование этого напряжения осуществляет в блоке 1 моделирования двигателя следующим образом.
Уравнение, которое описывает работу двигателя, имеет следующий вид
(«.м-М,
где W - угловая скорость вращения
вали двигателя; In - момент инерции, приведенной к валу двигателя; М - крутящий момент, приложенный к валу двигателя; h - положение рейки топливного насоса; Мр - момент сопротивления epauieнию вала двигателя. Данное уравнение решается с помоцыо интегратора 2, на выходе которого формируется напряжение U . помощью блока 22 нелинейности формируется зависимость U как функция от и, и и(фиг.б).
Напряжение U, пропорциональное положению рейки топливного насоса, формируется с помощью блока 21 нелинейности (фиг.5). На вход блока 2 поступает напряжение U,которое определяет -положение муфты регулятора зависящее от напряжения, пропорционального положению педали топлива, KOtopoe снимается с движка потенциометра 19 управляемого педолы} 18 подачи топлива.
В устройстве условие одновременной передачи момента и оборотов осуществляет за счет того, что выходной интегратор предыдущего блока является входным интегратором следующего блока, т.е. блока 2 моделирования трансмиссии.
На выходе блока 2 формируется напряжение, пропорциональное моменту и оборотам ведущего колеса, следующим образом.
Система уравнений, описывающая работу трансмиссии,имеет следующий вид:
где w - угловая скорость вращения выводного вала коробки передач;
ев инерции, приведенный к выводному валу коробки передач;
Н - момент упругих сил, действующих в коробке передач:
г суммарная податливость вращающихся частей коробки передач;
I
передаточное число коробки передач;;
угловые скорости вращения
левого и правого ведущих колес;
I - момент инерции, приведенный к каждому ведущему колесу со стороны трансмиссии и гусеничного движителя M j упругих сил, действующих в бортовых механиз мах поворота;
М моменты упругих сил, действующих в гусеничном движителе.
Уравнение (1) решается с помощью суммирующего интегратора 33, на входы которого поступает напряжение U,j с учетом коэффициента I с коммутатора 31, напряжение U, с выхода усилителя J«0 и напряжение с выхода усилителя I. На этом суммирующем интеграторе указанные напряжений складываются и интегрируются, в результате чего на выходе интегратора 33 формируется напряжения ц,.-.
Напряжение Ujvifj. формируется следующим образом. На выходе суммирубщего интегратора 2, который является общим для блоков моделирования двигателя и трансмиссии, имеется напряжение Un. пропорциональное угловой скорости вала двигателя. Последнее поступает на коммутатор 25| при помощи которого происходит деление напряжения U,- на коэффициент, пропорциональный передаточному числу коробки передач. Напряжение U,o, поступает на суммирующий интегратор 26, на другой вход которого поступает напряжение ((/.-.и на выходе суммирующего интеграторе 26 появляется напряжение, т.е. решается уравнение (.2 системы. Напря79жение и проходит через ограничитель 29 и поступает на усилитель 30 при помощи которого оно преобразуется по знаку и величине. С ограничителем 29 моделируется работа главного фрикциона. На управляющие входы ограничителя 29 поступает разнополярное напряжение с датчиков главного фрикциона 28, с помощью которого осуществляется oi- раничение напряжения по амплитуде. При положении датчика, соответствующему полностью выжатому главному фрикциону (движки потенциометра находятся в крайнем нижнем положении7 напряжение на выходах датчика равно нулю, поэтому уровень ограничения р вен нулю, а следовательно, и напряжение на выходе ограничителя 29 рав но нулю, т.е. моделируется факт раз рыва силовой цепи. Коммутаторы 25 и Заслужат для преобразования напряжений u/c в соответствии с передаточным число i коробки передач. Управление коммутаторами осуществляется с помощью датчика 27 рычага переключения переда который в простейшем случае представ ляет собой набор микровыключателей, каждый из которых подключает опреде ленную цепь коммутаторов 25 и 31, соответствующую в установленной рычагом передачи. Напряжение U с выхода суммирующего интегратора 33 поступает на вход суммирующего интегратора 32 на другой вход которого поступает напряжение Uj с выхода суммирующего интегратора 46, в результате на выходе интегратора 32 появляется напряжение т.е. решается уравнение (4) системы. Далее это напряжение, проходя через ограничитель и усилитель 39 поступает на вход суммирующего интегратора 45, на дру гой вход которого поступает напряжение с мостового выпрямителя 4 пропорциональное тормозному моменту Н. Мостовой выпрямитель 42 служит для того, чтобы можно было моделировать торможение тормозом пово рота независимо от полярности напря жения на выходе интегратора 45. Напряжение поступает на мостовой выпрямитель с датчика 41 тормоза поворота. Таким образом,с помощью интегрирующего сумматора 45 решается уравнение (3) системы. Моделирование работы бортового рикциона осуществляется с помощью граничителя 36 и датчика 35 бортового фрикциона точно также, как в случае с главным фрикционом. Работа бортового механизма другого орта производится также, как и ля первого борта. Интеграторы 46 и 47, как и в редыдущих случаях, являются общими оответственно для левого и правого усеничных движителей, работа котоых моделируется с помощью блоков 4 5. Работа блоков 4, 5 например, праого, основана на решении системы ифференциальных уравнений (M,,,f-Mc) .,-) где V скорость правого гусеничного движителя; радиус ведущего колеса; момент инерции массы машины, приведенный к ведущему колесу; 1 - суммарная податливость гусеничного движителя. Пример конкретного выполнения одного блока моделирования гусеничного движителя приведен на фиг.8,, другой блок идентичен первому. Напряжение с выхода суммирующего интегратора 47 поступает на вход суммирующего интегратора 48, на другой вход которого поступает напряжение U, на выходе этого интегратора формируется напряжение решается уравнение (2) системы. Последнее проходит через усилитель 49, с помощью которого (З преобразуется по знаку и величине поступает на суммирующий интегратор 53, на другой вход которого через мостовой выпрямитель 50 и инвертор 52 подается напряжение V , пропорциональное сопротивлению грунта при прямолинейном движении с датчика 6 вида грунта. Третий вход интегратора 51 служит для подключения к нему напряжения, пропорционального моменту сопротивления повороту. Таким образом, на входе интегратора 5 появляется разность напряжений которая затем интегрируется, в результате чего на вы 9 ходе интегратора 5 появляется напряжение, пропорциональное Uy, т. решается уравнение (1 системы. Таким образом, на выходе суммирующих интеграторов Л6 и 7, а еле дэвательно, и на выходах блоков Ц 5 моделирования гусеничных движите лей имеются напряжения Uy, в личины которых определяются положе нием датчиков органов управления. Если UY Uv2, то движение будет прямолинейным, в любых других случаях движение будет криволинейным. В этом случае на третьи входы блоков 4 и 5 подаются напряжения U пропорциональные моменту, действующему на гусеничный движитель при повороте, причем знак этого напряжения за счет инвертора 3 будет различный для блоков U и 5 моделирования гусеничного движителя. Это сделано для того, чтобы при поворо те гусеничной машины на забегающую гусеницу действовал тормозной, а на отстающую - раскручивающий момент. Формирование напряжения ществляется следующим образом. С помощью инвертора и сумматора опре деляется напряжение, пропорциональ ное угловой скорости поворота гусеничной машины, т.е. решается зависимостьгде W - угловая скорость поворота машины; скорость забегающей гусен - скорость отстающей гусени расстояние между гусеницами. При определении фактической кри визны траектории поворота принимается, что Vi.+ V A-const тогдд, , т.е. представляется возможным взять линейную зависимос между иц,и и. Зависимость коэффициента сопрот ления Л1 от кривизны К, а следовательно, при указанном допущении и от W имеет вид ntQf. . ЖОХ )| а(1-о)5о 10 где п - максимальный коэффициент сопротивления поворота при и зависящий от вида грунта; а - постоянный коэффициент; R - радиус поворота, К - кривизна поворота. Эта зависимость при /4 юх 1(фиг.2) реализуется с помощью блока 15 нелинейности. Напряжение, пропорциональное мо- менту сопротивления поворота М, определяется из выражения MCH -4- а с учетом различных видов грунта эта зависимость будет иметь вид „ .,„„, Указанная зависимость Сфиг.З ) решается с помощью функциональных преобразователей 11, 12 и сумматора 8. Каждый функциональный преобразователь 11 и 12 формируетнапряжение, пропорциональное моменту сопротивления повороту, в зависимости от вида грунта, с разной полярностью, которая определяется напряжением поворота гусеничной машины. Определение условий опрокидывания осуществляется из нахождения критической скорости, при которой возникает опрокидывание. Значение критической скорости определяется из выражения v; -V63,S7RKP скр -Vi где V - скорость центра машины, при которой для данного критического радиуса наступает опрокидывание; h - высота центра тяжести. Скорость центра машины равна ,/2. Напряжение Uyj, определяется с помощью сумматора 7, на входы которого поступают напряжения иу,и Uv, соответственно с блоков и 5. Напряжение U j nocTynaeT на вход блока 13 деления, на другой вход которого поступает напряжение Uy;с выхода сумматора 10, в результате на выходе блока 13 появляется напряжение, пропорциональное радиусу поворота машины. Однако это напряжение будет иметь различные знаки при повороте в разные стороны. Чтобы знак последнего не менялся, напряжение 3 пропускается через блок 1 выделения модуля, с выхода которого
напряжение | Un./поступает на блок 16 нелинейности,который реализует функцию извлечения квадратного Корня с учетом коэффициента К-/Ь, В результате чего формируется напряжение , , пропорциональное величине критической скорости, при которой при данном радиусе возникает опрокидывание. Последнее с помощью схемы 17 сравнения сравнивается с напряжением пропорциональным действительной скорости движения машины, и если ,. напряжение ниже напряжения Uy , то на выходе схемы 17 сравнения напряжение равно нулю, если ( U, то напряжение на ее выходе принимает максимальное значение, что указывает на наличие опрокидывания.
Таким образом, устройство при моделировании динамики движения позволяет определить условия, при которых возникает опрокидывание гусеничной машины. При использовании предлагаемого устройства в тренажере и фиксировании у обучаемых случаев, когда у них наступает опрокидывание с соответствующим пояснением причин, то управление реальными гусеничными машинами позволяет избежать аварий с ояень тяжелыми последствиями.
Формула изобретения Устройство для моделирования динамики движения гусеничной машины; по авт.св. № 883929, отличающееся тем, что, с целью повышения точности за счет определения условий опрокидывания гусеничной машины, содержит третий сумматор, блок деления, блок выделения модуля напряжения, второй блок воспроизведения нелинейности и схему сравнения, причем первый и второй входы третьего сумматора соответственно соединены с выходами первого и второго блоков
моделирования гусеничного движителя, выход третьего сумматора подключен
к первому входу схемы сравнения и первому Входу блока деления, второй вход которого соединен с выходом вто рого сумматора, выход блока деления через последовательно соединенные блок выделения модуля и функциональный преобразователь подключен к второму входу схемы сравнения, выход которой является выходом устройства.
Источники информации, принятые во внимание при экспертизе
и,
«fcn
- Afejf MOKf - AfejTj
fS
L
10
wf. %МГ Л. Jf
t/
Ci/
Фиг.2
Фиг.З
2f
t
кл,г
Фиг. 5
- и
ш
Фив. 6 Г 92в от ffa.l Фи9. 7
fii.8
