1ри.)
узел 10 сравнения, дифференциальноинтегрально-пропорциовальное эвено 9 связан с вторым входом С 7. В нормальном режиме работы, когда Д 5 работает в синхронном режиме, регулятор .напряжения , в состав которого входят звено 9, .узел 10 и датчик 11, обеспечибает равенство угла S запирания И 1 номинальному значению (8 и ), а частота на выходе И 1 равна частоте генератора 14. При исчезновении напряжения питания напряжение на шинах 4 с помощью того же регулятора поддерживается на номи-. нальном уровне, И 1 не работает, а Д 5 возбуждается конденсаторной батареей 2. В этом режиме исключается
перенапряжение на Д 5 и на выходе И 1. -Регулятор, в состав которого входят блоки 8,14,13,15 устанавливает угол запирания И 1 выше номинального значения и подготавливает И 1 к работе в поелеаварийном режиме. После восстановления напряжения питания указанный регулятор устанавливает ток в цепи питания Д 5 больше номинальной величины, но меньше величины, при которой Д 5 перешли бы в асинхронньй режим. Т.о. после восстановления питания Д 5 разгоняются синхронно и по достижении номинальной скорости угол5ц изменяется так,что ток в цепи питания Д5 становится равным номинальному значению.2с.п.ф-лы,2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА | 2007 |
|
RU2360353C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ГИСТЕРЕЗИСНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2361354C2 |
| Способ управления гистерезисным электроприводом | 1989 |
|
SU1746508A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Устройство для автоматической настройки тока компенсации в режиме однофазного замыкания на землю в электрических сетях карьеров | 1987 |
|
SU1467663A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Система для пуска синхронного электропривода | 1983 |
|
SU1164846A1 |
| Способ управления асинхронным электроприводом | 1990 |
|
SU1830608A1 |
Изобретение относится к электротехнике. Цель изобретения заключается в снижении оперегрузки инвертора в режимах несинхронизации инерционных двигателей. Цель достигаетcJRi двумя вариантами исполнения устройства. Согласно первому варианту гистерезисный электропривод технологической линии содержит группу гистерезисных электродвигателей (Д) 5, подключенных к источнику питания через инвертор (и) 1 тока. К выходу 1 пoдк нoчeны конденсаторная бата;рея 2, управляемый компенсатор 3 реактивной мощности, первые входы систем (с) 6 и 7 управления И 1 и компенсатором 3. Второй вход С 6 через дифференциально-интегрально-пропорциональное звено 16, узел 15 сравнения и частотно-фазовый детектор 13 связан с выходом задающего генератое S ра 14. Второй вход узла 15 соединен с датчиком 8 тока, установленным в цепи И 1. Второй вход детектора 13 соединен с первыми входами С 6, 7 и входом датчика 11 выходного напряжения И 1. Выход датчика 11 через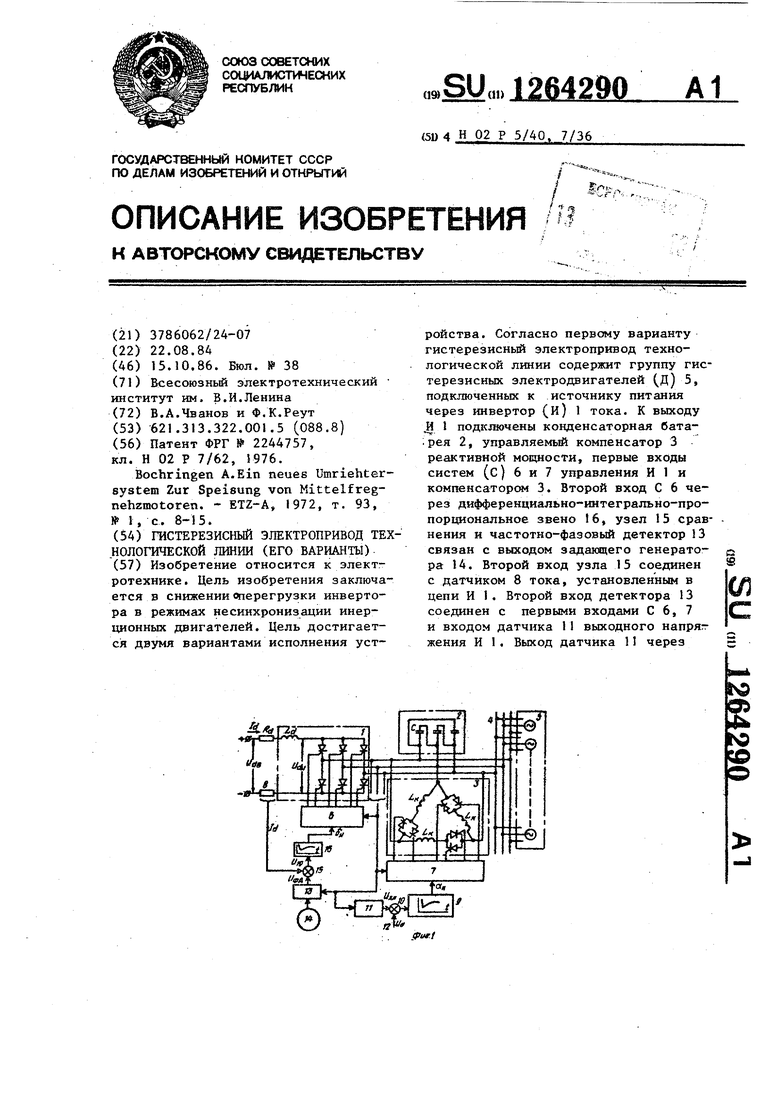
1
Изобретение относится к электротехнике , а именно к управлению гисте резисным электроприводом, и может быть использовано в системах регулирования многодвигательными технологическими линиями.
Цель изобретения состоит в снижении перегрузки инвертора в режимах ресинхронизации гистерезисных двигателей, исключени перенапряжения при перерьшах питания инвертора и колебаний системы инвертор-гистерезисные двигатели в предсинхронном режиме.
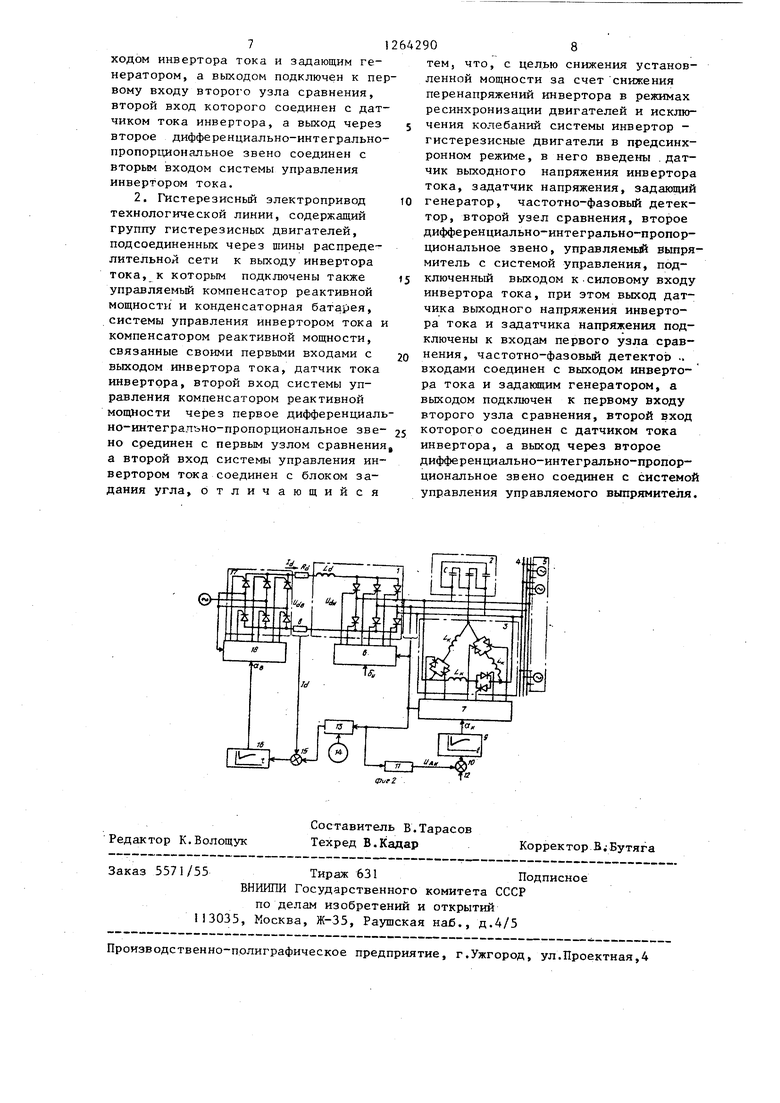
На фиг.I приведена схема гистерезисного электропривода технологической линии; на фиг,2 - вариант его выполнения.
Гистерезисный электропривод (фиг.1) содержит инвертор 1, к выходу которого подключены конденсаторная батарея 2, управляемый компенсатор 3 реактивной мощности и через шины распределительной сети 4 группа гистерезисных двигателей 5, системы 6 и 7 управления инвертором и компенсатором реактивной мощности, связанные своими первыми входами с выходоминвертора тока,датчик 8 тока инвертора тока, дифференциально-интегрально-пропорциональное звено 9 выходом соединено с вторым входом системы управления компенсатором реактивной мощности, а вводом соединено с выходом первого узла 10 сравнения, датчик 11 выходного напряжения инвертора тока и задатчик 12 напряжения выходами соединены
с входами первого узла сравнения, частотно-фазовый детектор 13 входами соединен с выходом инвертора тока и задающим генератором 14, а выходом подключен к первому входу
второго узла 15 сравнения, второй вход которого соединен с датчиком 8 тока инвертора тока, а выход узла 15 сравнения через второе дифференциально-интегрально-пропорциональное звено 16 соединен с вторым входом системы управления инвертором тока.
Гистерезисный электропривод (фиг.2) дополнительно содержит управляемый выпрямитель 17 с системой
18 управления, выход управляемого вьшрямителя 17 подключен к силовому входу инвертора 1 тока, а выход второго дифференциально-интегральнопропорциоиального звена 16 соединен
с системой 18 управления управляемого выпрямителя 17.
Работа гистерезисного электропривода по фиг.1 состоит в следующем. В нормальном режиме двигатели 5
технологической линии находятся в синхронном режиме и потребляют мощность , которой соответствует ток -латлертора Потерями в инверторе пренебрегаем как несущественными для проводимого ниже анализа. Напряжение на выходе инвертора стабилизируется автоматическим регу лятором напряжения (блоки 9 - II на фиг.1) на номинальном уровне U , Ug. Угол запирания инверто ра регулируется специальным регулят ром Сблоки 8, 14, 13, 16 на фиг.1) так, что задается ток Ij, по ребляемьй инвертором от источника питания в соответствии с выражением в напряжение источника питания; 3 п J и созЬцнапряжение на шинах постоянного тока инвертора; напряжение на выходе инвертора; угол запирания ин вертора; сопротивление линии постоянного тока инвертора. В (2) RJ - постоянные Поэтому ток определяется величины. углом запирания инвертора и J - j., ((,). Эта зависимость положена в основу работы специального автома тического регулятора. Специальный регулятор работает как регулятор тока Ij , уставка кото роге зависит от частоты на выходе инвертора и фазы вектора напряжения на выходе инвертора относительно ф 1Ы вектора напряжения ;задающего внератора. Для этого на входы бло:а 13 частотно-фазового детектора юданы сигналы с выхода инвертора и )т задакяцего генератора 1.4. Сигнал гока Ij с выхода блока 8 сравнивает ся во втором узле 15 сравнения с выходным сигналом частотно-фазового детектора и через второе дифференциально-интегрально-пропорциональное звено 16 поступает на вход сист мы 6 управления инвертора, тем самы 4 задавая величину угла S инвертора. Специальный регулятор настраивается так, что в нормальном рабочем режиме соблюдается равенство правых частей выражений (1) и (2), а угол S ;,ом и частота на выходе инвертора равна частоте задающего генератора. Таким образом обеспечивается требуемый рабочий режим привода. При перерьше питания U, 0 ток в цепи постоянного тока инвертора не протекает: Ij О. Инвертор не работает. Компенсатор же (см. схему на фиг.1) с помощью регулятора напряжения (блоки 9 - 11 на фиг..1) продолжает стабилизировать напряжение на шинах 4 на номинальном уровне, а двигатели 5 возбуждаются конт денсаторами 2. Таким образом, при перерывах питания исключаются перенапряжения на двигателях технологической линии и на выходе инвертора. В течение перерьша питания двигатели не получают энергии из сети и поэтому выбегают. По мере выбега двигаталей частота на шинах 4 постепенно снижается и становится ниже номинальной, поэтому, в свою очередь, равна частоте задающего генератора. Специальный регулятор (блоки 8, 14, 13J 15 и 16 на фиг.1) в этом режиме устанавливает угол йц выше номинального и подготавливает инвертор к работе в послеаварийном режиме, когда после восстановления напряже ния источника питания потребуется разогнать двигатели 5 до номинальной скорости вращения. После восстановления напряжения источника питания специальный регулятор устанивливает такую величину угла 8ц , при которой инвертор развивает ток Ij больше номинальной величины, но меньше величины, при которой двигатели 5 перешли бы в асинхронный.режим разгона. При этом после перерыва питания разгон двигз телей происходит в синхронном режиме. После разгона двигателей до номинальной скорости автоматически с помощью сигнала частотно-фазового детектйра 13 производится изменение угла S так, что ток 1 становится равным номинальному значению соглас. но (1)-и, следовательно, снова восстанавливается номинальный рабочий режим. Таким образом, исключается перегрузка инвертора в режиме ре5
синхронизации двигателей и исключа-. ется асинхронный режим их работы.
На фиг.2 представлен вариант электропривода, в котором введен управляемый выпрямитель. Компенсатор снабжен регулятором напряжения (блоки I 1 , 10 и 9 на фиг.2), который в нормальном режиме, при перерыве питания и после восстановления напряжения питания при ресинхронизации двигателей работает одинаково, обеспечивая стабилизацию на номинальнЬм уровне напряжения на выходе инвертора. Специальный регулятор (блоки 14, 13, 15 и 16 на фиг.2) воздействует на угол управления выпрямителя oig , а угол запирания инвертора поддерживается системой 6 управления на неизменном .уровне во всех режимах.
В нормальном режиме работы электропривода (фиг.2 ) специальньй регулятор автоматически устанавливает значение угла о , при котором выпрямитель развивает такую величину тока Ii , которая обеспечивает работу двигателей 5 в.нормальном рабочем режиме. При исчезновении напряжения в питающей сети ток Ij падает до нуля, компенсатор поддерживает на выходе инвертора номинальное напряжение а двигатели, не получая энергии из сети, выбегают, что сопровождается постепенным снижением частоты на выходе инвертора.
После восстановления напряжения в питакицей сети выпрямитель 17 (фиг.2) снова вступает в работу, а специальный регулятор, регулируя . угол ос в, устанавливает величину тока Ij 5 которая вьше номинального уровня, но ниже уровня, при котором двигатели переходят в асинхроиньй режим.
Таким образом, исключается асинхронный режим при ресинхронизации двигателей и ресинхронизация протекает при синхронном режиме. Этим исключается также перегрузка инвертора в режиме ресинхронизации. После разгона двигателей до синхронной скорости по сигналу частотно-фазового детектора 13 через блоки 15 и 16 (фиг.2) производится изменение угла Ы g и ток 11 устанавливается равным номинальному. Следовательно, гГосле разгона двигателей до номинальной скорости вращения производится восг
642906
становление номинального рабочего режима.
Предлагаемое устройство исключает в режимах ресинхронизации пере5 грузку инвертора и дополнительные потери в роторах технологической линии за счет отсутствия асинхронного режима, в режимах аварийных перерывов питания - перенапряжение на шинах
10 двигателей и на выходе инвертора, поскольку в этих режимах функционирует введенная система стабилизации напряжения, кроме того, исключаются колебания в системе инвертор - дви15 гатели в системе разгона двигателей, вызванные характерными для гистерезисных двигателей разными изменениями зависимостей мощности двигателей от его параметров при переходе
20 из асинхронного режима в синхронный и обратно.
Формула изобретения
5 I. Гистерезисньй электропривод технологической линии, содержащий группу гистерезисных двигателей, подсоединенных через щины распределительной сети к выходу инвертора
0 тока, к которьм подключены также управляемый компенсатор среактивной мощности и конденсаторная батарея, системы управления инвертором тока и компенсатором реактивной мощности, связанные своими первыми входами с выходом инвертора тока, датчик тока инвертора, второй вход системы управления компенсатором реактив-ной мощности через первое дифференQ циально-интегрально-пропорциональное звено соединен с первым узлом сравнения, отличающийся тем, что, с целью снижения установленной мощности за счет снижения перенапряжений инвертора при ресинхронизации двигателей и исключения колебаний системы инвертор - гистерезисные двигатели в предсинхронном режиме, в него введены датчик выходного напряжения инвертора тока, задатчик напряжения, задающий генератор.
частотно-фазовый детектор, второй узел сравнения, второе дифференциал но-интегрально-пропорциональное звено, при этом выход датчика выходного напряжения инвертора тока и задатчик напряжения подключены к входам первого узла сравнения, частотно-фазовый детектор входами соединен Ъ вы
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ ИЗ ПРУЖИННЫХ СТАЛЕЙ МАРТЕНСИТНОГО КЛАССА | 2003 |
|
RU2244757C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Bochringen A.Ein neues Umriehtersystem Zur Speisung von Mittelfregnehzmotoren | |||
| - ETZ-A, 1972, т | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
