Изобретение относится к медицинской технике и может быть использовано при изучении нейрофизиологических механизмов регуляции координированных движений и удержания поз, а также для исследования инструментальной условно-рефлекторной деятельности во время выполнения точност- ,ных двигательных актов, например, слеже- кия.
Цель изобретения - повышение точности и стабильности удержания животным усилия, а также повышение эффективности обучения за счет автоматизации процессов включения условного раздражителя и кормушки и автоматической оценки времени удержания животным требуемой величины усилия, т.е. автоматизация процесса обучения инструментальной двигательной реакции требуемой стабильности (точности) величины усилия удержания педали на протяжении заданного интервала времени.
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - принципиальная схема генератора синусоидального напряжения; на фиг. 3 - принципиальная схема последовательно соединенных релейного элемента, аттенюатора и второго релейного элемента; на фиг. 4 - пример конкретной реализации устройства.
Устройство для обучения животных точностному двигательному навыку (фиг. 1) содержит генератор 1 синусоидального сигнала, выход которого подключен к первому входу суммирующего усилителя 2 и к тензо- резисторам педали 3, подключенным к входам тензоусилителя 4, выход которого через аттенюатор 5 подключен к второму входу суммирующего усилителя 2, выход которого соединен с входом электронно-лучевого индикатора бис входом блока 7 двухполу- периодного выпрямления с сглаживающим фильтром. Выход блока 7 через последовательно соединенные первый релейный элемент 8, аттенюатор 5, первый интегратор 9, второй релейный элемент 10 и формирователь 11 импульса подключен к схеме управления кормушкой 12 и к входу установки «О .триггера 13. Выход «О триггера 13 подключен к управляющему входу генератора 1 синусоидального сигнала и к дополнительному входу второго интегратора 14, выход которого через третий релейный элемент 15 подключен к входу установки «1 триггера. Выход «1 триггера 13 подключен к дополнительному входу первого релейного элемента 8 и через ключ 16 и третий аттенюатор 5 к основному входу второго интегратора 14. Животное 17 воспринимает сигнал на экране индикатора 6 и нажимает лапой на педаль 3, изменяя сопротивление тензорезис- торов и уменьшая вертикальную линию на экране индикатора, пока не получает пищевое подкрепление из кормушки 12. Схема оснащена индикаторами 18 состояния триггера, подключенными к его выходам, и кнопками 19 ручного режима управления ра
ботой устройства, подключенными к входам установки состояния триггера. Замкнутое состояние ключа 16 соответствует циклическому режиму автоматической подачи условного раздражителя.
Генератор синусоидального напряжения (фиг. 2) собран на операционном усилителе 20 по обычной схеме с самовозбуждением. Особенностью схемы является включение в место разрыва резистора 21 от нулевой точки схемы триода 22 так, что эмиттер триода подключен к общей точке схемы, а его коллектор - к резистору 21. Сопротивление коллектор-эмиттерного перехода триода меняется под действием управляющего напряжения, поступающего в его базу через резистор-23, и транзистор работает как управляемый ключ. Делитель напряжения, составленный из резисторов 24 и 25, обеспечивает запирание триода в отсутствии управляющего напряжения. В этом случае сопротивление коллектор-эмиттерного перехода велико, и резистор 21 отключен от общей точки схемы. На выходе операционного усилителя 20 напряжение равно нулю, так как не выполняется условие самовозбуждения схемы. При подаче положительного
напряжения по управляющему входу через резистор 23 триод 22 открывается (замыкается электронный ключ) вследствие уменьшения сопротивления коллектор-эмиттерного перехода, и резистор 21 подключается к общей точке схемы, обеспечивая режим самовозбуждения генератора.
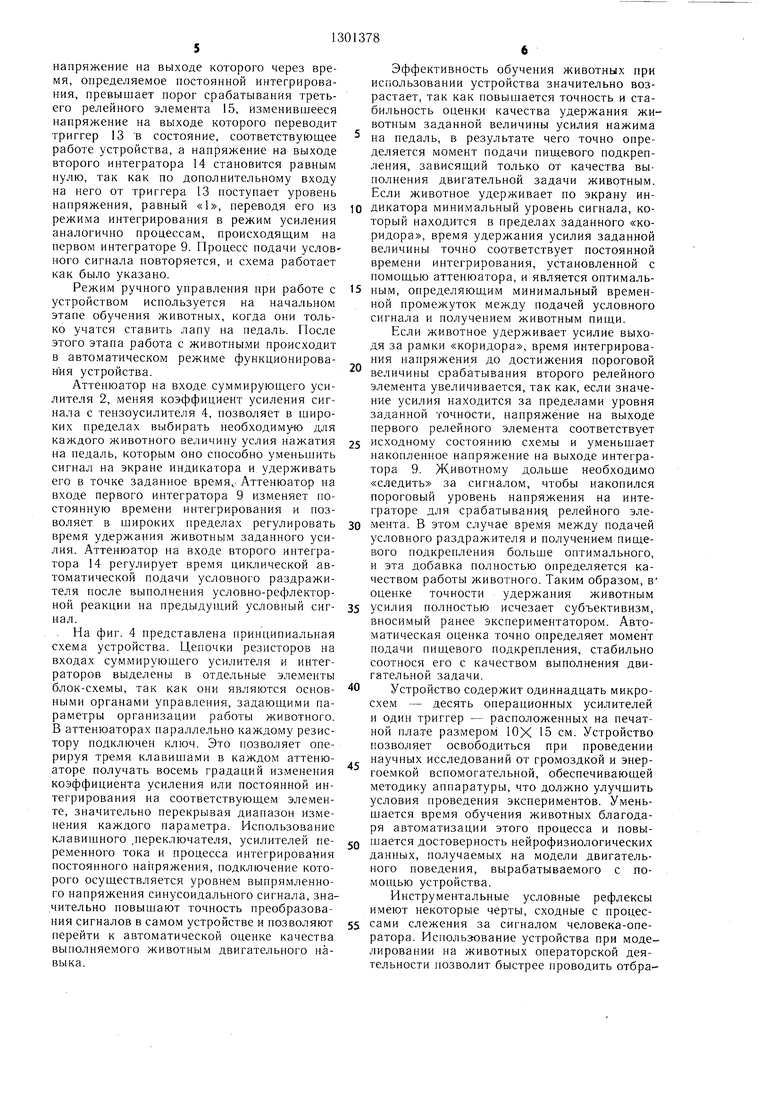
На фиг. 3 представлена принципиальная схема последовательно соединенных пер вого релейного элемента 8, аттенюатора 5, первого интегратора 9 и второго релейного элемента 10. В исходном состоянии подополнительному входу через резистор 26 на релейный элемент 8 поступает блокирующее напряжение с выхода «1 триггера 13. Диод 27 подключен к выходу блока 7, напряже- 1ше на выходе которого в этот момент равно нулю. Таким образом, положительное напряжение с выхода первого релейного элемента поступает через резисторы аттенюатора 5 па вход первого интегратора 9, в обратной связи которого кроме конденсатора 28 включены параллельно ему последовательно соединенные резистор 29 и диод 30. Положительное входное напряжение инвертируется на интеграторе в отрицательное, открывая диод 30 и замыкая цепь обратной связи через резистор 29, который щунтирует конденсатор 28, превращая интегратор 9 в
усилитель с коэффициентом передачи значительно меньшим «1, поддерживая на его выходе близкий к нулю потенциал. Такое же напряжение на выходе интегратора 9 в случае подачи отрицательного напряжения на релейный элемент 8 по основному входу
через диод 27. Только когда животное начинает работать и уменьшается напряжение на выходе суммирующего усилителя 2, напряжение на основном входе первого релейного
элемента 8 тоже уменьшается и, достигнув близкого к нулю уровня, заставляет срабатывать первый релейный элемент, переключая полярность напряжения на его выходе на отрицательную. Значение сопротивления резистора 31 определяет уровень сигнала с выхода блока 7, при котором происходит срабатывание релейного элемента 8. Этот уровень выпрямленного напряжения определяет величину минимального сигнала на экране индикатора и задает необходимую точность удержания усилия на определенном уровне. При постепенном увеличении усилия на педаль амплитуда синусоидального сигнала на выходе суммирующего усилителя 2 уменьшается и становится равной нулю при «равенстве сигналов с выхода тензо- усилителя и генератора с учетом коэффициентов усиления на его входах. Если далее увеличивать усилие на педаль, амплитуда синусоидального сигнала на выходе суммирующего усилителя 2 увеличивается и вновь растет выпрямленное напряжение на выходе блока 7.
Таким образом, номинал сопротивления резистора 31 определяет коридор, в котором «разрешены колебания усилия относительно заданного уровня. Независимо от абсо- лютной величины усилия в пределах, определяемых «шириной коридора, на выходе релейного элемента 8, а следовательно, и на выходе интегратора 9 (на входе аттенюатора) всегда отрицательное напряжение постоянной амплитуды, которое инвертиру- ется на интеграторе 9 в положительное, запирая диод 30 и обеспечивая процесс интегрирования. . I
Постоянная времени интегратора 9 определяется значениями сопротивлений резисторов аттенюатора, входного резистора ин- тегратора и емкостью конденсатора 28 в цепи обратной связи. В соответствии с этой постоянной времени при условии выдерживания близкого к нулю напряжения на основном входе релейного элемента 8 на выходе интегратора 9 через определенный промежу- ток времени накапливается напряжение, которое превышает порог срабатывания релейного элемента 10, в результате происходит изменение полярности напряжения на его выходе и запуск процесса преобразования сигнала на следующем функциональном узле устройства.
Устройство для обучения животных точностному двигательному навыку работает следующим образом.
В исходном состоянии, если ключ 16 ра- зомкнут, напряжение с выхода «1 триггера 13 блокирует работу первого релейного элемента 8, обеспечивая нулевое напряжение на выходе первого интегратора 9. Нулевой уровень напряжения с выхода «О триггера срывает колебания генератора 1 по управляющему входу. На экране электроннолучевого индикатора 6 видна светящаяся точка. В режиме ручного управления при
замыкании кнопки 19 на входе ус-ановки «1 триггера 13 происходит смена состояний «О и «1 на его выходах, и на управляющий вход генератора 1 синусоидального сигнала поступает уровень напряжения, соответствующий «1, а на дополнительный вход первого релейного элемента 8 - уровень напряжения, соответствующий «О. В генераторе 1 начинается автоколебательный режим, а синусоидальное напряжение с его выхода поступает на вход суммирующего усилителя 2 и на тензорезисторы педали 3.
Напряжения с выхода генератора 1 и тен- зоусилителя 4 поступают на входы суммирующего усилителя 2 в противофазах так, что при увеличении напряжения на выходе тензоусилителя 4 синусоидальное напряжение на выходе суммирующего усилителя 2 уменьшается. В начальный момент, так как животное не воздействует на педаль, на выходе тензоусилителя 4 напряжение равно нулю, а на выходе суммирующего усилителя 2 - максимальная амплитуда синусоидального напряжения, определяемая амплитудой сигнала на выходе генератора 1. На экране индикатора наблюдается светящаяся вертикальная линия, так как развертка луча по горизонтали отключена. Синусоидальный сигнал с вы.чода суммирующего усилителя 2 выпрямляется и сглаживается в блоке 7 и поступает на вход первого релейного элемента 8, напряжение с выхода которого сохраняет нулевой потенциал на выходе интегратора 9.
Когда животное нажимает на педаль, происходит уменьшение амплитуды синусоидального сигнала на выходе суммирующего усилителя 2 и уменьщение вертика,1ьной линии на экране индикатора. При полной компенсации первоначального уровня сигнала (на экране индикатора 6 линия сведена в точку) срабатывает первый релейный элемент 8, запуская процесс интегрирования постоянного по амплитуде сигнала на интеграторе 9. Процесс интегрирования продолжается до тех пор,пока напряжение на выходе интегратора 9 не превышает порог срабатывания второго релейного элемента 10, изменившееся напряжение на выходе которого запускает процесс формирования импульса, который с выхода формирователя 11 поступает в схему управления кормушкой 12 и на вход установки «О триггера 13. Последний переключается в исходное состояние, срывая режим самовозбуждения в генераторе 1 и блокируя релейный элемент 8.
На выходе первого интегратора 9 напряжение становится равным нулю, а на экране индикатора остается светяшаяся точка. В циклическом режиме автоматической подачи условного раздражителя ключ замкнут, и напряжение с выхода триггера 13, соответствующее уровню «Ь в исходном состоянии, подается через аттенюатор 5 на вход второго интегратора 14, увеличивающееся
напряжение на выходе которого через время, определяемое постоянной интегрирования, нревышает порог срабатывания третьего релейного элемента 15, изменившееся напряжение на выходе которого переводит триггер 13 В состояние, соответствующее работе устройства, а напряжение на выходе второго интегратора 14 становится равным нулю, так как по дополнительному входу на него от триггера 13 поступает уровень напряжения, равный «1, переводя его из режима интегрирования в режим усиления аналогично процессам, происходящим на первом интеграторе 9. Процесс подачи услов пого сигнала повторяется, и схема работает как было указано.
Эффективность обучения животных при использовании устройства значительно возрастает, так как новыщается точность и стабильность оценки качества удержания животным заданной величины усилия нажима
на педаль, в результате чего точно определяется момент подачи пищевого подкрепления, зависящий только от качества выполнения двигательной задачи животным. Если животное удерживает по экрану ин10 дикатора минимальный уровень сигнала, который находится в пределах заданного «коридора, время удержания усилия заданной величины точно соответствует постоянной времени интегрирования, установленной с помощью аттенюатора, и является оптимальРежим ручного управления при работе с 15 ным, определяющим минимальный временустроиством используется на начальном этапе обучения животных, когда они только учатся ставить лапу на педаль. После этого этапа работа с животными происходит в автоматическом режиме функционирования устройства.
Аттенюатор на входе суммирующего усилителя 2, меняя коэффициент усиления сигнала с тензоусилителя 4, позволяет в щиро- ких пределах выбирать необходимую для каждого животного величину услия нажатия на педаль, которь м оно способно yMeHbHJHTb сигнал на экране индикатора и удерживать его в точке заданное время,- Аттенюатор на входе первого интегратора 9 изменяет постоянную времени интегрирования и позволяет в широких пределах регулировать время удержания животным заданного усилия. Аттенюатор на входе второго интегратора 14 регулирует время циклической автоматической подачи условного раздражителя после выполнения условно-рефлекторной реакции на предыдуп ий условный сигнал.
. На фиг. 4 представлена принципиальная схема устройства. Цепочки резисторов на входах суммирующего усилителя и интеграторов выделены в отдельные элементы блок-схемы, так как они являются основными органами управления, задающими параметры организации работы животного. В аттенюаторах параллельно каждому резистору подключен ключ. Это позволяет оперируя тремя клавишами в каждом атт1гню- аторе получать восемь градаций изменения коэффициента усиления или постоянной интегрирования на соответствующем элементе, значительно перекрывая диапазон изменения каждого параметра. Использование клавишного ,переключателя, усилителей неременного тока и процесса интегрирования постоянного напряжения, подключение которого осуществляется уровнем выпрямленного напряжения синусоидального сигнала, зна- .чительно повышают точность преобразования сигналов в самом устройстве и позволяют перейти к автоматической оценке качества выполняемого животным двигательного навыка.
Эффективность обучения животных при использовании устройства значительно возрастает, так как новыщается точность и стабильность оценки качества удержания животным заданной величины усилия нажима
на педаль, в результате чего точно определяется момент подачи пищевого подкрепления, зависящий только от качества выполнения двигательной задачи животным. Если животное удерживает по экрану ин0 дикатора минимальный уровень сигнала, который находится в пределах заданного «коридора, время удержания усилия заданной величины точно соответствует постоянной времени интегрирования, установленной с помощью аттенюатора, и является оптималь5 ным, определяющим минимальный времен0
НОИ промежуток между подачей условного сигнала и получением животным пищи.
Если животное удерживает усилие выходя за рамки «коридора, время интегрирования напряжения до достижения пороговой величины срабатывания второго релейного элемента увеличивается, так как, если значение усилия находится за пределами уровня заданной точности, напряжение на выходе первого релейного элемента соответствует исходному состоянию схемы и уменьшает накопленное напряжение на выходе интегратора 9. Животному дольще необходимо «следить за сигналом, чтобы накопился пороговый уровень напряжения на интеграторе для срабатывани51 релейного эле0 мента. В этом случае время между подачей условного раздражителя и получением пищевого подкрепления больше оптимального, и эта добавка полностью определяется качеством работы животного. Таким образом, в оценке точности удержания животным усилия полностью исчезает субъективизм, вносимый ранее экспериментатором. Автоматическая оценка точно определяет момент подачи пищевого подкрепления, стабильно соотнося его с качеством выполнения двигательной задачи.
Устройство содержит одиннадцать микросхем - десять операционных усилителей и один триггер - расположенных на печатной плате размером 10Х 15 см. Устройство позволяет освободиться при проведении научных исследований от громоздкой и энергоемкой вспомогательной, обеспечивающей методику аппаратуры, что должно улучшить условия проведения экспериментов. Уменьшается время обучения животных благодаря автоматизации этого процесса и повыQ шается достоверность нейрофизиологических данных, получаемых на модели двигательного поведения, вырабатываемого с помощью устройства.
Инструментальные условные рефлексы имеют некоторые черты, сходные с процессами слежения за сигналом человека-оператора. Использование устройства при моделировании на животных операторской деятельности позволит быстрее проводить отбра0
5
5
ковку животных и быстрее обучать их, выводя на стабильный уровень выполнения двигательной задачи, что повысит эффективность научных исследований по изучению нейрофизиологических механизмов опознания сигналов, принятия решения и выполнения координированных целенаправленных движений.
Формула изобретения
Устройство для обучения животных точностному двигательному навыку, содержащее педаль, на упругом элементе которой закреплены тензорезисторы, кормушку со схемой управления, электронно-лучевой индикатор, генератор синусоидального сигнала и тензоусилитель, отличающееся тем, что, с целью автоматизации процесса обучения инструментальной двигательной реакции требуемой стабильности (точности) величины усилия удержания педали на протяжении заданного интервала времени, оно дополнительно содержит последовательно соединенные суммирующий усилитель, блок двух
полупериодного выпрямления со сг.шжива- ющим фильтром, первый релейный адемент, аттенюатор, первый интегратор, второй релейный элемент и формирователь импульса, а также триггер и последовательно соединенные второй аттенюатор, второй интегратор и третий релейный элемент, выход которого подключен к входу «Установка 1 триггера, второй вход триггера подключен к выходу формирователя импульса, подключенного также к входу схемы управления кормушкой, первый выход триггера подключен к добавочному входу первого релейного элемента и через ключ к входу второго аттенюатора, а второй выход триггера подключен к дополнительному входу второго интегратора и к управляющему входу генератора синусоидального сигнала, выход которого соединен с тензорезисторами педали и с первым входом суммирующего усилителя, к второму входу которого через третий аттенюатор подключен выход тензоусилителя, к входу которого подключены тензорезисторы педали, а выход суммирующего усилителя подключен также к входу электроннолучевого индикатора.
23
Н
Фаг. 2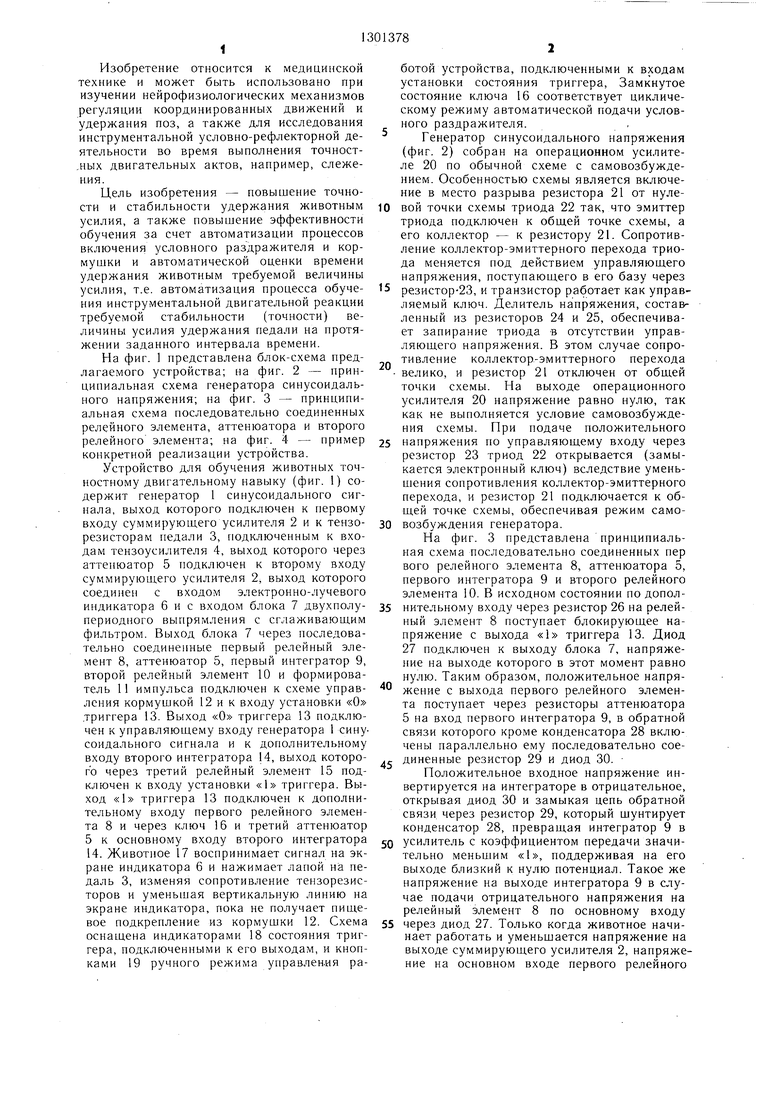


| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения водителя автомобиля служебному торможению | 1990 |
|
SU1790000A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ИНТЕНЦИОННОГО ТРЕМОРА В ЭКСПЕРИМЕНТЕ НА ЖИВОТНЫХ (FELIS CATTUS) | 2011 |
|
RU2493610C2 |
| Устройство контроля комбинационных составляющих сигнала нелинейного четырехполюсника | 1985 |
|
SU1264111A1 |
| Устройство для проверки усилителей низкой частоты | 1989 |
|
SU1723541A1 |
| Тренажер водителя транспортного средства | 1986 |
|
SU1328837A1 |
| ГРИФОВЫЙ ЭЛЕКТРОМУЗЫКАЛЬНЫЙ ИНСТРУМЕНТ, ГЕНЕРАТОР ТОНА, ОПТРОННАЯ ПЕДАЛЬ ГРОМКОСТИ | 2003 |
|
RU2249859C2 |
| Устройство для измерения токовых шумов двухполюсников | 1987 |
|
SU1495836A1 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| Реле активного тока | 1984 |
|
SU1295473A1 |
| Компенсационный фазометр | 1977 |
|
SU736018A1 |

Изобретение относится к медицинской технике и может использоваться для изучения нейрофизиологических механизмов. Цель изобретения - автоматизация процессов обучения инструментальной двигательной реакции требуемой стабильности (точности) величины усилия удержания педали на протяжении заданного интервала времени. Устройство состоит из генератора 1 синусоидального сигнала, педали 3 с тензо- резисторами для регистрации усилия, тензо- усилителя 4, электронно-лучевого индикатора 6 и кормушки 12 со схемой управления, а также схемы автоматической оценки качества слежения и автоматизации процесса обучения. В устройство введены три релейных элемента 8, 10 и 15, интеграторы 9 и 14, аттенюаторы 5 и триггер 13, которые своими связями обеспечивают автоматическую процедуру обучения и ведения эксперимента. Последовательное соединение релейного элемента 8, аттенюатора 5, интегратора 9 и второго релейного элемента 10 позволяет автоматизировать получение оценки качества удержания животным требуемой величины усилия и определять момент подачи пищевого подкрепления. 4 ил. i (Л 00 со СХ) Фиг. 1
-Ш
4с13
29 30
Z70K
Уси/jue
/М 80K ОК 20К
Сигна/i Косцалл.
fKniffOK т
J-S, гКН нрс:э- ФагЛ
На т шлейф
Составитель Б. Кузьмич
Редактор И. ГорнаяТехред И. ВересКорректор А. Зимокосов
Заказ 921/3Тираж 596Подиисное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская иаб., д. 4/5 Производственно-полиграфическое иредприятие, г. Ужгород, ул. Проектная, 4
| Бойко М | |||
| И., Горбунова И | |||
| М., Залкинд В | |||
| И., Романов С | |||
| П | |||
| Комплексная регистрация электроннографических и биомеханических показателей при исследовании навыка регуляции точностного усилия у собак.-Физиологический журнал СССР, 1981, № 7, с | |||
| ЦЕНТРОБЕЖНАЯ ЗЕРНОСУШИЛКА | 1919 |
|
SU1106A1 |
