Изобретение относится к автоматическому управлению массообменными и -гидромеханическими процессами или системы жидкость - твердая фаза в колонном аппарате с пульсирующим перемешиванием, секционированном провальными тарелками, в частности процессами выщелачивания, промывки твердых частиц, отмывки растворимых ценных веществ с одновременной классификацией твердых частиц и др., и может быть использовано в химической промыщленности, гидрометаллургии и других отраслях промышленности.
Целью изобретения является исключение потерь ценного компонента при разгрузке твердого продукта
соединения пульсационнои камеры осуществляют экспериментальным путем на основании зависимости содержания ценного компонента в выгружаемом твердом продукте от положения границы раздела фаз в цилиндрическом корпусе над местом присоединения пульсационнои камеры и соответствующего ему давления сжатого воздуха в пуль- сационной системе (фиг. 2 и 3). Из этих данных видно, что при подъеме уровня 10 фаз выше места присоединения пульсационнои камеры на 1-2 м наблюдается резкое снижение концентрации растворимого вещества в выгружаемом осадке (фиг. 1), соответствующее этому изменению резкое повышение давления сжатого воздуха в пульНа фиг. 1 представлена блок-схема систе- 5 сационной системе (фиг. 2). Анализ этих зави- мы автоматического управления процессомсимостей показывает, что для осуществле20
25
контактирования твердых частиц и жидкости в колонном аппарате с пульсирующим перемешиванием; на фиг. 2 - пример зависимости концентрации (с) ценного компонента (молибдена) в жидкой фазе нижней разгрузки от расстояния границы раздела фаз между твердым материалом и жидкостью над местом присоединения пульсационнои камеры (L); на фиг. 3 - то же, от величины давления (Р) сжатого воздуха в пульсационнои системе.
Блок-схема (фиг. 1) содержит цилиндрический корпус 1 колонного аппарата, секционированный провальными тарелками 2, нижнюю коническую отстойную камеру 3, пульсационную систему, включающую пуль- сационную камеру 4, связанную с устройством 5 для обеспечения возвратно-поступательных колебаний и ресивером 6. На крышке последнего установлены показывающий (контрольный) 7 и электрический дистанционный 8 манометры, соединенный через вто-35 ричный прибор 9 с регулирующим клапаном 10, установленным на линии сжатого воздуха перед ресивером 6. В пульсационнои камере 4 установлен емкостной датчик I1 электронного индикатора 12 уровня, соеди- .,. ценного с разгрузочным клапаном 13 через вторичный прибор 14 с задатчиком.
Способ автоматического управления процессом контактирования твердых частиц и жидкости в колонном аппарате с пульсируюния автоматического управления процессом контактирования необходимо границу раздела фаз в рабочем корпусе поднимать выше места присоединения пульсационнои камеры на заданную величину, а давление сжатого воздуха в нульсационной системе поддерживать (стабилизировать) в соответствующем диапазоне. Поэтому одновременно с подъемом границы раздела фаз в рабочем корпусе выше месте присоединения пульсационнои камеры на заданную величину повышают (фиг. 3) давление сжатого воздуха в пульсационнои системе. Повышение давления осуществляют задатчиком вторичного прибора 9, воздействующего на регу- 30 лирующий клапан 10 до значения, при котором накопленный до заданного значения под вижной слой частиц поддерживается во взвешенном состоянии, а положение границы колебаний сжатого воздуха и жидкости в пульсационнои камере 4 находится в ее средней части. Далее достигнутое давление сжатого воздуха в пульсационнои системе поддерживают с помощью манометра 8 и вторичного прибора 9 и регулирующим клапаном 10.
Затем задатчиком вторичного прибора 14 осуществляют открытие разгрузочного клапана 13 на 50% его проходного сечения. При этом происходит разгрузка твердого материала из аппарата и далее емкостной датчик 11 электронного йндикатощим перемешиванием осуществляется еле- 45 рз 2 уровня авоматически контролирует
дующим образом.
Исходный твердый материал и жидкость поступают в колонный аппарат противотоком (фиг. 1). В цилиндрической части 1 аппарата в условиях пульсационного перемешивания происходит контактирование фаз. 50 вляет воздействие на выгрузку твердой фазы. Прореагировавшие твердые частицы в мо-При этом, если, например, граница размент заполнения аппарата накапливаются в нижней отстойной камере 3 и цилиндрическом корпусе 1 аппарата выше места
изменение положения границы колебаний сжатого воздуха и жидкости в пульсационнои камере 4 и в зависимости от ее положения с помощью вторичного прибора 14 и разгрузочного клапана 13 осущестприсоединения пульсационнои камеры 4 на заданную величину.
Установление уровня раздела между твердой и жидкой фазами выше места при55
дела фаз в цилиндрической части корпуса несколько опускается (но находится в пределах цилиндрического корпуса), то соответственно опускается граница колебаний в пульскамере 4. Уровнемер 12 через вторичный прибор 14 подает команду на уменьшение величины проходного сечения клапана 13.
0
5
5 ,.
ния автоматического управления процессом контактирования необходимо границу раздела фаз в рабочем корпусе поднимать выше места присоединения пульсационнои камеры на заданную величину, а давление сжатого воздуха в нульсационной системе поддерживать (стабилизировать) в соответствующем диапазоне. Поэтому одновременно с подъемом границы раздела фаз в рабочем корпусе выше месте присоединения пульсационнои камеры на заданную величину повышают (фиг. 3) давление сжатого воздуха в пульсационнои системе. Повышение давления осуществляют задатчиком вторичного прибора 9, воздействующего на регу- 0 лирующий клапан 10 до значения, при котором накопленный до заданного значения под вижной слой частиц поддерживается во взвешенном состоянии, а положение границы колебаний сжатого воздуха и жидкости в пульсационнои камере 4 находится в ее средней части. Далее достигнутое давление сжатого воздуха в пульсационнои системе поддерживают с помощью манометра 8 и вторичного прибора 9 и регулирующим клапаном 10.
Затем задатчиком вторичного прибора 14 осуществляют открытие разгрузочного клапана 13 на 50% его проходного сечения. При этом происходит разгрузка твердого материала из аппарата и далее емкостной датчик 11 электронного йндикатовляет воздействие на выгрузку твердой фазы. При этом, если, например, граница разизменение положения границы колебаний сжатого воздуха и жидкости в пульсационнои камере 4 и в зависимости от ее положения с помощью вторичного прибора 14 и разгрузочного клапана 13 осущест
дела фаз в цилиндрической части корпуса несколько опускается (но находится в пределах цилиндрического корпуса), то соответственно опускается граница колебаний в пульскамере 4. Уровнемер 12 через вторичный прибор 14 подает команду на уменьшение величины проходного сечения клапана 13.
В случае поступления большего количества твердого материала вторичный прибор 14 увеличивает величину проходного сечения клапана. Таким образом, уровень границы раздела между твердой фазой и жидкостью находится в заданном, положении.
Формула изобретения
Способ автоматического управления процессом контактирования твёрдых частиц-и
ке осуществляют подъем уровня раздела между твердой и жидкой фазами в аппарате выше места подсоединения пульсационной камеры на заданное значение, одновременно повышают давление сжатого воздуха в пульсационной системе для сохранения положения границы колебаний сжатого воздуха и жидкости в пульсационной намеренна заданном уровне и при достижении уровня раздела между твердой и жидкой фазами в
жидкости в колонном аппарате с пульсирую- ю аппарате заданного значения стабилизируют щим перемешиванием, включающий регулирование давления сжатого воздуха в пульсационной камере и отвода твердых частиц, отличающийся тем, что, с целью исключения потерь ценного компонента при разгрузке
твердого продукта, дополнительно при загруз- 5 сационной камере.
достигнутое значение давления сжатого воздуха в пульсационной системе, а отвод твердых частиц из аппарата осуш.ествляют в зависимости от положения границы колебаний сжатого воздуха и жидкости в пуль2,02,2
Фиг. 3
Редактор А. Петров Заказ 925/6
ВНИИПИ Государственного комитета СССР по .аелам изобретений н открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. -1
ке осуществляют подъем уровня раздела между твердой и жидкой фазами в аппарате выше места подсоединения пульсационной камеры на заданное значение, одновременно повышают давление сжатого воздуха в пульсационной системе для сохранения положения границы колебаний сжатого воздуха и жидкости в пульсационной намеренна заданном уровне и при достижении уровня раздела между твердой и жидкой фазами в
аппарате заданного значения стабилизируют
аппарате заданного значения стабилизируют
сационной камере.
достигнутое значение давления сжатого воздуха в пульсационной системе, а отвод твердых частиц из аппарата осуш.ествляют в зависимости от положения границы колебаний сжатого воздуха и жидкости в пуль0,5 / /,5 2 L
Фиг. 2
2,4 Р,кг/сп
Составитель Т. Го.1еншина
Техред И. Верес Корректор Т. Колб
Тираж .657Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОЦЕССА КЛАССИФИКАЦИИ ТВЕРДОГО МАТЕРИАЛА В ВЕРТИКАЛЬНОМ ПОТОКЕ С ПУЛЬСАЦИОННЫМ ПЕРЕМЕЩЕНИЕМ | 2013 |
|
RU2530941C1 |
| Пластинчатый классификатор | 1988 |
|
SU1563760A1 |
| Способ проведения разделительного и массообменного процессов | 1987 |
|
SU1494918A1 |
| Прямоточный смеситель-отстойник | 1976 |
|
SU806057A1 |
| Экстрактор для виноградных выжимок | 1990 |
|
SU1759866A1 |
| Массообменный аппарат | 1988 |
|
SU1623684A2 |
| Устройство для контактирования твердой фазы с жидкостью | 1982 |
|
SU1076137A1 |
| Колонна-классификатор | 1983 |
|
SU1106536A1 |
| Аппарат для контактирования | 1979 |
|
SU812336A1 |
| Отстойник-дозатор дисперсного твердого материала | 1984 |
|
SU1186234A1 |
Изобретение относится к способу автоматического управления процессом контактирования твердых частиц и жидкости в колонном аппарате, может быть использовано в химической промышленности и позволяет исключить потери ценного компонента при разгрузке твердого продукта. Способ реализуется системой автоматического регулирования, включающей контур регулирования давления сжатого воздуха изменением его подачи в ресивере 6,датчик 8 давления, регулятор 9, клапан 10, контур регулирования уровня в пульсационной камере 4 изменением отвода твердого материала из аппарата 1, датчик 12 уровня, регулятор 14, клапан 13. 3 ил. 1 твердый (Л с со 4 СО о Фиг. t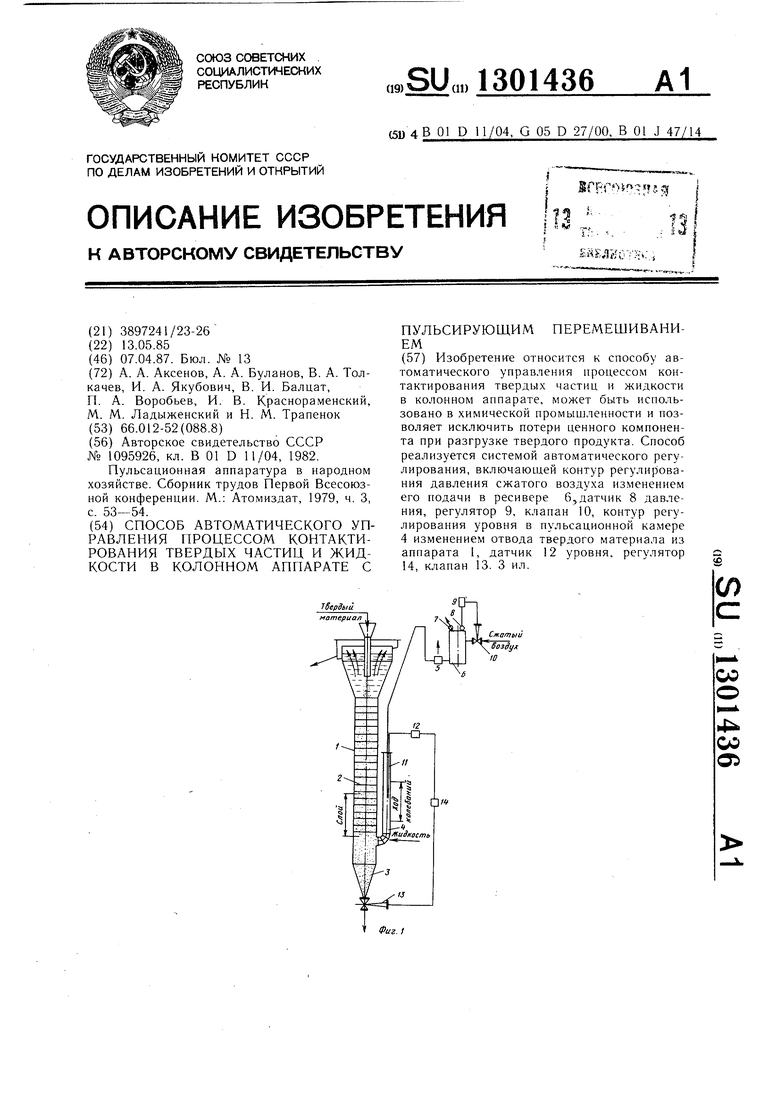
| Способ автоматического управления процессом жидкостной экстракции в пульсационной колонне | 1982 |
|
SU1095926A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пульсационная аппаратура в народном хозяйстве | |||
| Сборник трудов Первой Всесоюзной конференции | |||
| М.: Атомиздат, 1979, ч | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| . | |||
