11302434
Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах аналого-цифрового преобразования угловой информации,5
Целью изобре тения является упрощение преобразовйт е гя при сохранении его высокой разрешающей способности. На фиг. 1 представлена структурная схема преобразователя; на фиг.2 -}0 схема коммутатора квадрантов; на фиг. 3 - схема масштабного блока; на фиг. 4 - схема суммо-разностного блока; на фиг. 5 - схема блока формироСинусно-косинусный датчик 1 угла записывается переменным напряжением
и U.sinuJt. (1)
При этом с выхода датчика 1 снимаются напряжения
и К-и sin pd- sinuJt;
и, K-u,
COS pd sinuJt.
(2)
и и U поступают на сигСигналы
I A
нальные входы коммутатора 2 квадрантов и на синусный и косинусный входы
. ii rJ failC4. rilljr «lJUJril 4 4«n.l.jr - l- iri
вателей огибающих меандров; на фиг.6-15 суммо-разностного блока 4 соответстсхема блока сложения несущих; на фиг. 7 - схема типового узла блока сложения несущих соответственно; на фиг. 8 - диаграмма работы преобразо вателя,
20
Преобразователь содержит синусно- косинусный датчик 1 угла, коммутатор 2 квадрантов, масштабный блок 3, сум- мо-разностный блок 4, блок 5 формирователей огибающих меандров, блок 6 сложения несущих.
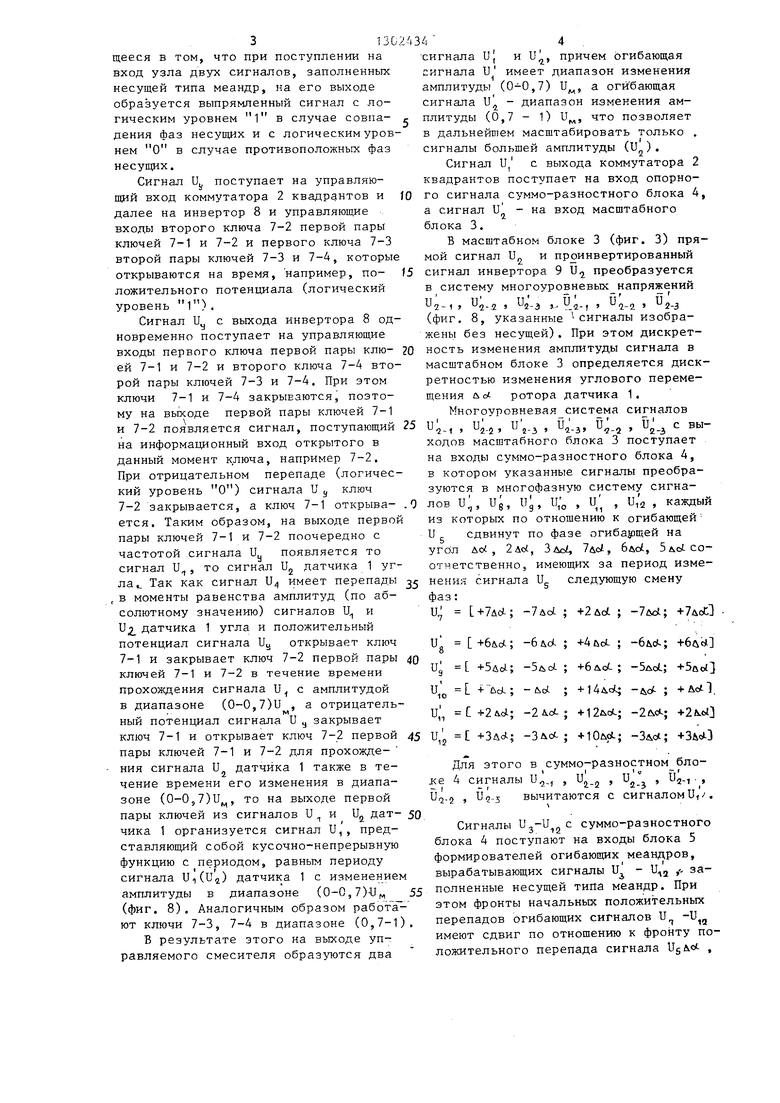
Коммутатор 2 (фиг. 2) квадрантов содержит ключи 7-1 - 7-4 и инвертор 8.
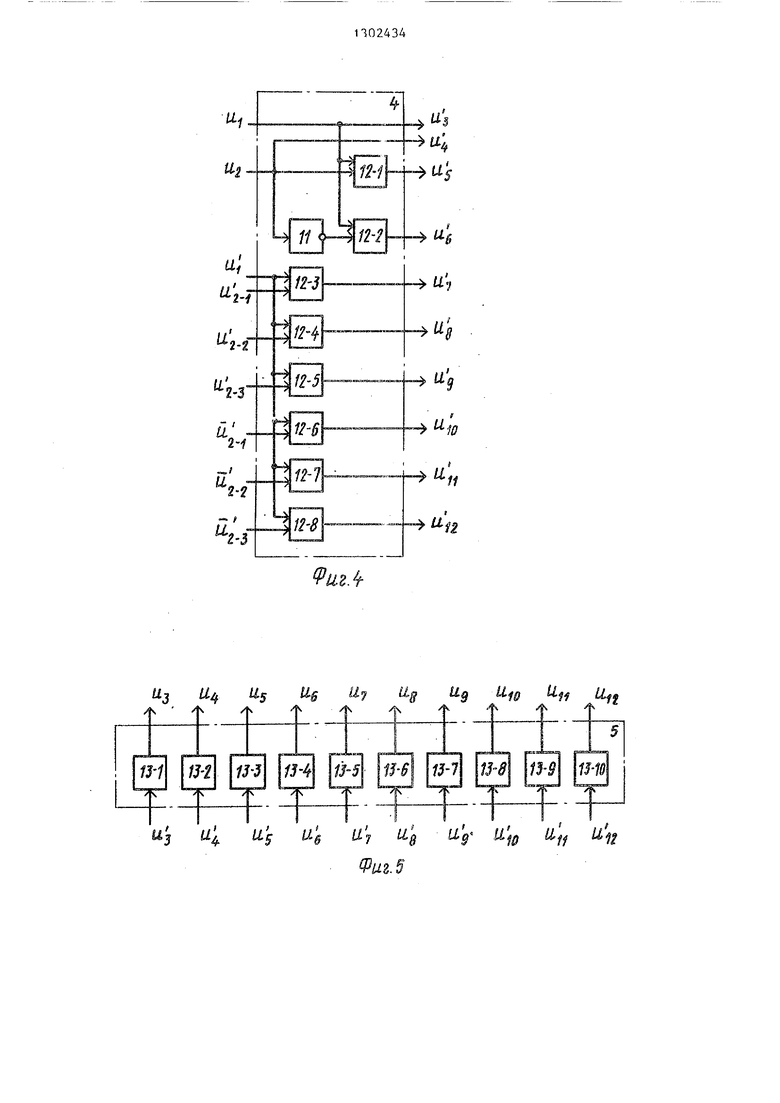
венно. В блоке 4 (фиг. 4) сигнал U, сравнивается с сигналами U и U на элементах 12-1 и 12-2 сравнения с выходов которых снимаются сигналы U и
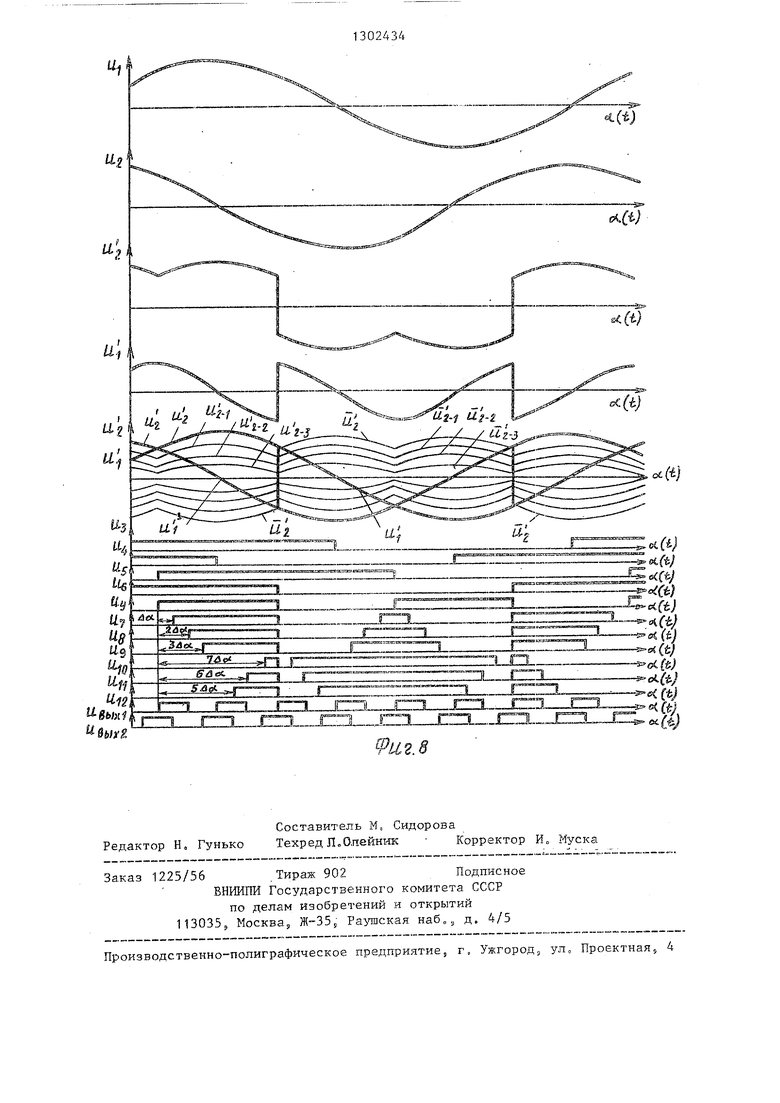
соответственно, имеющие частоту вращения ротора датчика и представляющие собой огибающие, заполненные несущей типа меандр (фиг. 8, показа- jf ны только огибающие меандров) и сдви7 нутые между собой на 90 эл.град. и на 45 эл.град. относительно огибаю ЩИХ
и, и Uo соответственно.
Сигналы и
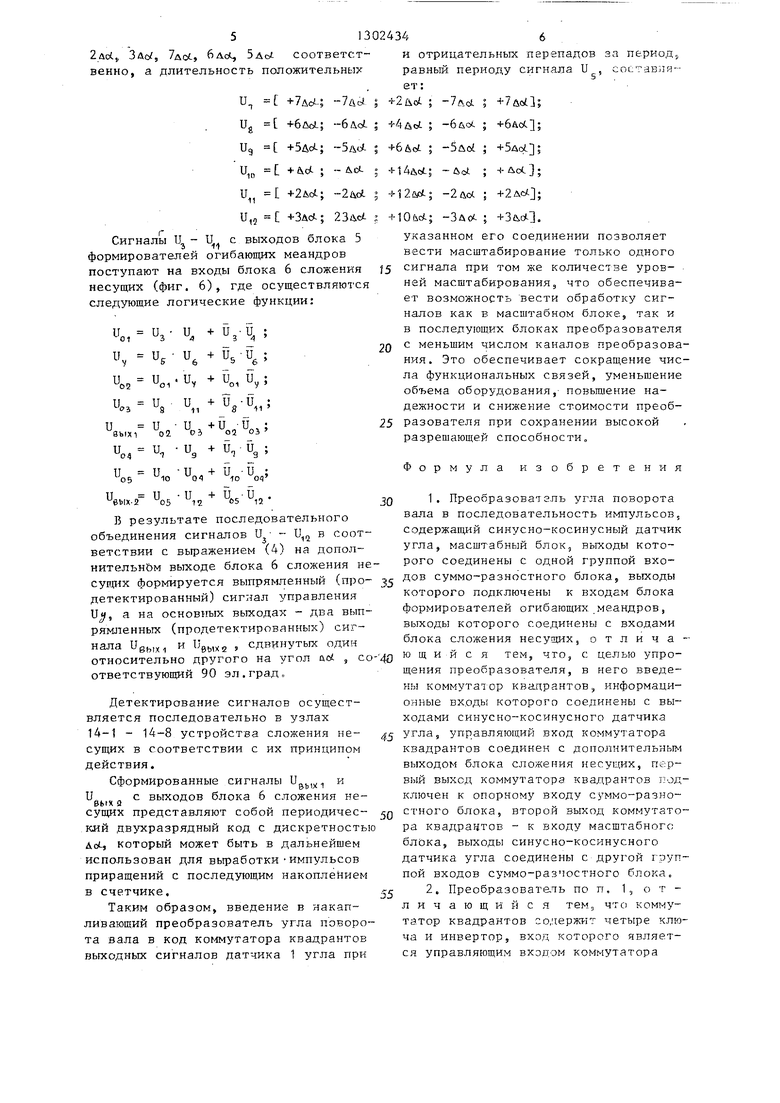
и Ug с выхода суммоМасштабный блок 3 (фиг. 3) содер- 30 разностного блока 4 поступают на со- жит инвертор 9 и резистйвные делите- ответствующие усилители формировате- ли 10-1 - 10-6.
Суммо-разностный блок 4 (фиг. 4) содержит инвертор 11 и элементы 12-1ли 13-3 и 13-4 блока 5 формирователей (фиг. 5) огибающих меандров, с выхода которых снимаются сигналы U
12-8 сравнения,вьшолненные на диффе- 35 заполненные несущей типа меандр (фиг. 8, показаны только огибающие меандров),
ренциальных усилителях.
Блок 5 формирователей (фиг.5) огибающих меандров содержит усилители- ограничители 13-1 - 13-10. .
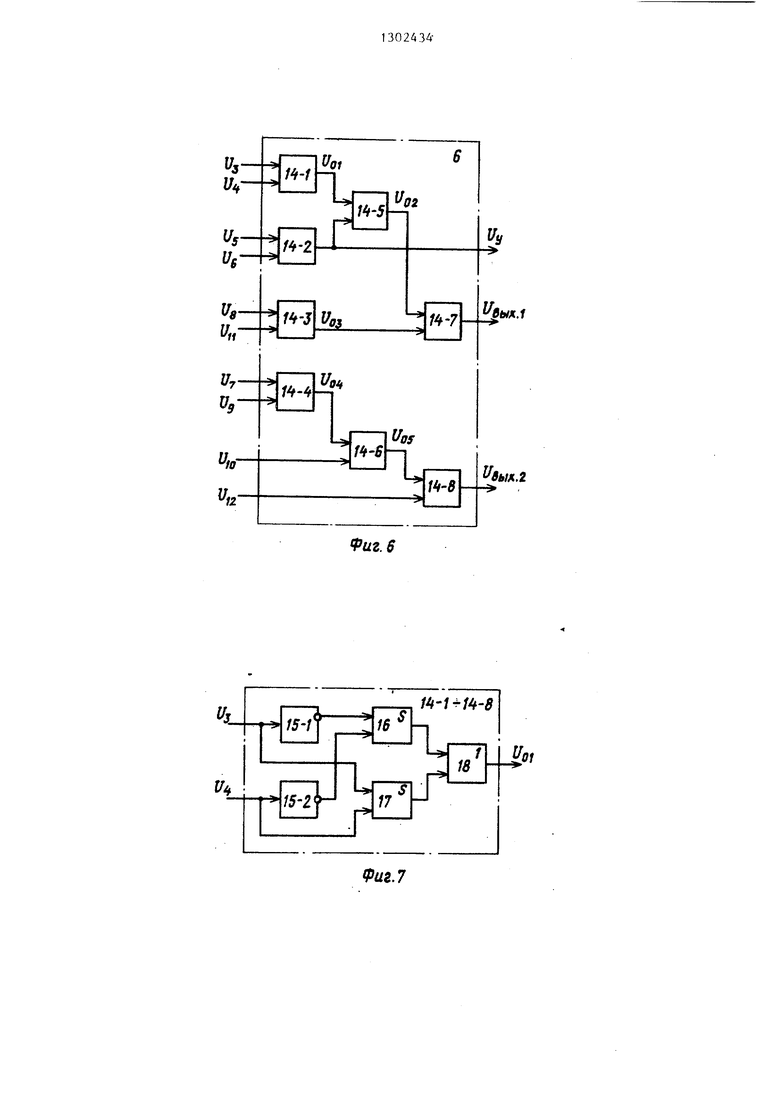
Блок 6 сложения (фиг. 6) несущих содержит узлы 14-1 - 14-8.
Типовой узел (14-1 - 14-8) содержит (фиг. 77 инверторы 15-1, 15-2, элементы И 16 и 17, элементы ИЛИ 18.
На диаграмме работы преобразователя приняты следующие обозначения: и и и, -сигналы с выходов синусно- косинусного Датчика 1 угла; U и U - сигналы с выходов коммутатора 2 квадрантов; и , , и . - с выходов масштабного блока 3; U , U , и и - и - сигналы с выходов суммо-разностного блока 4; Uj - -U,, - сигналы с выходов блока 5; U , Ug,.,
Uc3. Uo. V,os.
ДОВ узлов блока 6; U
40
андр (фиг. 8, показаны только огибающие меандров),
Сигналы и., и и, с выхода блока 6
о ь
формирователей огибающих меандров поступают на входы узла 14-2 устройства сложения несущих (фиг. 6), где осуществляется логическая функция
и,
и, + и U
(3)
45
В результате последовательного объединения сигнахюв Uj и U в соответ- ствиис выражением (3) на дополнительном выходе блока 6 сложения несущих 5Q формируется выпрямленный (продетек- тированный) сигнал управления и„ ,
и - сигналы с
V еых Bbtxa
сигналы с выходов блока 6.
Преобразователь работает следую- . щим образом.
имеющий частоту в 2 .раза большую по отношению сигнала U (U) и с перепадами в моменты равенства (по абсолют- выхо- 55 значению) напряжений U и Uj
датчика 1 угла. Детектирование сигналов осуществляется в узле 14-2 блока 6 сложения несущих в соответствии с его принципом действия, заключаюСинусно-косинусный датчик 1 угла записывается переменным напряжением
и U.sinuJt. (1)
При этом с выхода датчика 1 снимаются напряжения
и К-и sin pd- sinuJt;
и, K-u,
COS pd sinuJt.
(2)
и и U поступают на сигСигналы
I A
нальные входы коммутатора 2 квадрантов и на синусный и косинусный входы
ii rJ failC4. rilljr «lJUJril 4 4«n.l.jr - l- iri
суммо-разностного блока 4 соответст0
венно. В блоке 4 (фиг. 4) сигнал U, сравнивается с сигналами U и U на элементах 12-1 и 12-2 сравнения с выходов которых снимаются сигналы U и
соответственно, имеющие частоту вращения ротора датчика и представляющие собой огибающие, заполненные несущей типа меандр (фиг. 8, показа- f ны только огибающие меандров) и сдви7 нутые между собой на 90 эл.град. и на 45 эл.град. относительно огибаю ЩИХ
и, и Uo соответственно.
Сигналы и
и Ug с выхода суммоностного блока 4 поступают на со- етствующие усилители формировате-
разностного блока 4 поступают на со- ответствующие усилители формировате-
ли 13-3 и 13-4 блока 5 формирователей (фиг. 5) огибающих меандров, с выхода которых снимаются сигналы U
заполненные несущей типа ме
андр (фиг. 8, показаны только огибающие меандров),
Сигналы и., и и, с выхода блока 6
о ь
формирователей огибающих меандров поступают на входы узла 14-2 устройства сложения несущих (фиг. 6), где осуществляется логическая функция
и,
и, + и U
(3)
45
В результате последовательного объединения сигнахюв Uj и U в соответ- ствиис выражением (3) на дополнительном выходе блока 6 сложения несущих 5Q формируется выпрямленный (продетек- тированный) сигнал управления и„ ,
щееся в том, что при поступлении на вход узла двух сигналов, заполненных несущей типа меандр, на его выходе образуется выпрямленный сигнал с логическим уровнем 1 в случае совпа- дения фаз несущих и с логическим уровнем О в случае противоположных фаз несущих.
Сигнал Ujj поступает на управляющий вход коммутатора 2 квадрантов и далее на инвертор 8 и управляющие , входы второго ключа 7-2 первой пары ключей 7-1 и 7-2 и первого ключа 7-3 второй пары ключей 7-3 и 7-4, которые
открываются на время, например, по- f5 сигнал инвертора 9 U ложительного потенциала (логический 1) .
уровень
Сигнал Uy с выхода инвертора 8 одновременно поступает на управляющие
в систему многоуровневых напряжений
и;.
uJ-3 ..и;.,
преобразуется
зых
и:
масштабном блоке 3 определяется дискретностью изменения углового перемещения л ot ротора датчика 1,
Многоуровневая система сигналов
и;-, , Ui-2, и .-з . . и;. с вы- ходов масштабного блока 3 поступает на входы суммо-разностного блока 4, в котором указанные сигналы преобразуются в многофазную систему сигна.0 лов и„, Uf
и
и;о
и
и,
каждый
т Wg, I. g, U(j 11 - 12
ИЗ которых по отношению к огибающей и g сдвинут по фазе огибающей на угол лЫ , 2лЫ, Здо, 74с/, 6&ot, З&Ысо- отнетственно, имеющих за период изме- следующую смену
2-1 l-Z -2- 2-a
(фиг. 8, указанные сигналы изображены без несущей). При этом дискрет- входы первого ключа первой пары клю- 20 ность изменения амплитуды сигнала в ей 7-1 и 7-2 и второго ключа 7-4 второй пары ключей 7-3 и 7-4. При этом ключи 7-1 и 7-4 закрываются, поэтому на выходе первой пары ключей 7-1 и 7-2 появляется сигнал, поступающий 25 на информационный вход открытого в данный момент ключа, например 7-2. При отрицательном перепаде (логический уровень О) сигнала U , ключ 7-2 закрывается, а ключ 7-1 открывается. Таким образом, на выходе первой пары ключей 7-1 и 7-2 поочередно с частотой сигнала Uy появляется то сигнал и, то сигнал Uj датчика 1 угла Так как сигнал U имеет перепады нения сигнала U ,в моменты равенства амплитуд (по аб- фаз: солютному значению) сигналов Ц, и и датчика 1 угла и положительный потенциал сигнала Uy открывает ключ 7-1 и закрывает ключ 7-2 первой пары 40 ключей 7-1 и 7-2 в течение времени прохождения сигнала U с амплитудой в диапазоне (0-0,7)U , а отрицательный потенциал сигнала U у закрывает ключ 7-1 и открывает ключ 7-2 первой 45 пары ключей 7-1 и 7-2 для прохождения сигнала U, датчика 1 также в течение времени его изменения в диапазоне (0-0,7)11, то на выходе первой пары ключей из сигналов U и U дат- 50. чика 1 организуется сигнал U,, пред- ставляюш1Ий собой кусочно-непрерывную функцию с периодом, равным периоду сигнала Ui(Ui) датчиков 1 с изменением амплитуды в диапазоне (0-0,7)и„ 55 (фиг. 8). Аналогичным образом работ а ют ключи 7-3, 7-4 в диапазоне (0,7-1).
В результате зтого на выходе управляемого смесителя образ тотся два
12
С+2й.с1; -2л. .ct; +2&.l t (; -3&cL; +10ДЛ; -Злы; +3&d-3
2-2
Для этого в суммо-разностном бло и;., , и;; , и;,,,
5-5
ке 4 сигналы U,
и
- f
и,
i-2 2-J
вычитаются с сигналом U,/,
Сигналы Uj-U с суммо-разностного блока 4 поступают на входы блока 5 формирователей огибаюш:их меандров, вырабатывающих сигналы U - U , - заполненные несущей типа меандр. При этом фронты начальных положительных перепадов огибающих сигналов U -U,j имеют сдвиг по отношению к фронту по ложительного перепада сигнала ,
сигнала U| и U, причем огибающая сигнала имеет диапазон изменения амплитуды (0-0,7) U, а огй бающая сигнала - диапазон изменения амплитуды (0,7 - 1) и, что позволяет в дальнейшем масштабировать только . сигналы большей амплитуды (U).
Сигнал с выхода коммутатора 2 квадрантов поступает на вход опорного сигнала суммо-разностного блока 4, а сигнал U - на вход масштабного блока 3.
В масштабном блоке 3 (фиг. 3) прямой сигнал и.
и проинвертированныи
сигнал инвертора 9 U
в систему многоуровневых напряжений
и;.
uJ-3 ..и;.,
преобразуется
зых
и:
2-1 l-Z -2- 2-a
(фиг. 8, указанные сигналы изображены без несущей). При этом дискрет- ность изменения амплитуды сигнала в нения сигнала U фаз:
масштабном блоке 3 определяется дискретностью изменения углового перемещения л ot ротора датчика 1,
Многоуровневая система сигналов
и;-, , Ui-2, и .-з . . и;. с вы- ходов масштабного блока 3 поступает на входы суммо-разностного блока 4, в котором указанные сигналы преобразуются в многофазную систему сигна(фиг. 8, указанные сигналы изображены без несущей). При этом дискрет- ность изменения амплитуды сигнала в нения сигнала U фаз:
лов и„, Uf
и
и;о
и
и,
каждый
т Wg, I. g, U(j 11 - 12
ИЗ которых по отношению к огибающей и g сдвинут по фазе огибающей на угол лЫ , 2лЫ, Здо, 74с/, 6&ot, З&Ысо- отнетственно, имеющих за период изме- следующую смену
(фиг. 8, указанные сигналы изобраены без несущей). При этом дискрет- ность изменения амплитуды сигнала в нения сигнала U фаз:
фиг. 8, указанные сигналы изобраены без несущей). При этом дискрет- ость изменения амплитуды сигнала в ения сигнала U аз:
12
С+2й.с1; -2л. .ct; +2&.l t (; -3&cL; +10ДЛ; -Злы; +3&d-3
(фиг. 8, указанные сигналы изображены без несущей). При этом дискрет- ность изменения амплитуды сигнала в нения сигнала U фаз:
2-2
Для этого в суммо-разностном бло и;., , и;; , и;,,
5-5
ке 4 сигналы U,
и
- f
и,
i-2 2-J
вычитаются с сигналом U,
(фиг. 8, указанные сигналы изображены без несущей). При этом дискрет- ность изменения амплитуды сигнала в нения сигнала U фаз:
Сигналы Uj-U с суммо-разностного блока 4 поступают на входы блока 5 формирователей огибаюш:их меандров, вырабатывающих сигналы U - U , - заполненные несущей типа меандр. При этом фронты начальных положительных перепадов огибающих сигналов U -U,j имеют сдвиг по отношению к фронту положительного перепада сигнала ,
2aot, Здс/, 7&QL, бдоц 5ды соответственно, а длительность положительных
Сигналы и, - Ц с выходов блока 5 формирователей огибающих меандров поступают на входы блока 6 сложения несущих (фиг. 6), где осуществляются следующие логические функции:
В результате последовательного обьединения сигналов Ц в соответствии с выражением (4) на допол- нительн&м выходе блока 6 сложения не1. Преобразователь угла поворота вала в последовательность импульсов содержащий синусно-косинусный датчик угла, масштабный блок, выходы которого соединены с одной группой вхосущих формируется выпрямленный (про- 35 ° суммо-разностного блока, выходы
детектированный) сигнал управления Vy, а на основных выходах - два выпрямленных (продетектированных) сигнала Ug,, и Ugw,,2 , сдвинутых один относительно другого на угол аЫ , со--40 ответствуюш 1й 90 эл.град,,
Детектирование сигналов осуществляется последовательно в узлах 14-1 - 14-8 устройства сложения не- 5 сущих в соответствии с их принципом действия.
Сформированные сигналы .,;, и й „л с выходов блока 6 сложения не&Ь f л Э
сущих представляют собой периодичес- Q кий двухразрядный код с дискретностью ДоЦ который может быть в дальнейшем использован для вьфаботкиимпульсов приращений с последующим накоплением в счетчике,55
Таким образом, введение в накапливающий преобразователь угла поворота вала в код коммутатора квадрантов выходных сигналов датчика 1 угла при
которого подключены к входам блока формирователей огибающих, меандров, выходы которого соединены с входами блока сложения несущих, отлича ющий с я тем, что, с целью упрощения преобразователя, в него введены коммутатор квадрантов, информационные входы которого соединены с выходами синусно-косинусного датчика угла, управляющий вход коммутатора квадрантов соединен с дополнительным выходом блока сложения несуЕ1;их, первый коммутатора квадрантов под ключен к опорному входу суммо-разностного блока, второй выход коммутато ра квадрантов - к входу масштабного блока, выходы синусно-косршусного датчика угла соединены с другой груп пой входов суммо-разчостного блока.
2. Преобразователь по л, 1, о т - л и ч а ю щ и и с я тем,, что коммутатор квадрантов содержит четыре клю ча и инвертор, вход которого является управляющим входом коммутатора
и отрицательных перепадов за периоД;
равный периоду сигнала ет:
и
составияOfi.; -Здос ; +3e.di.
указанном его соединении позволяет вести масштабирование только одного
сигнала при том же количестве уровней масштабирования, что обеспечивает возможность вести обработку сигналов как в масштабном блоке, так и в последующих блоках преобразователя
с меньшим числом каналов преобразования. Это обеспечивает сокращение числа функциональных связей, уменьшение объема оборудования, повышение надежности и снижение стоимости преобразователя при сохранении высокой разрешающей способности.
Формула изобретения
1. Преобразователь угла поворота вала в последовательность импульсов, содержащий синусно-косинусный датчик угла, масштабный блок, выходы которого соединены с одной группой суммо-разностного блока, выходы
которого подключены к входам блока формирователей огибающих, меандров, выходы которого соединены с входами блока сложения несущих, отличающий с я тем, что, с целью упрощения преобразователя, в него введены коммутатор квадрантов, информационные входы которого соединены с выходами синусно-косинусного датчика угла, управляющий вход коммутатора квадрантов соединен с дополнительным выходом блока сложения несуЕ1;их, первый коммутатора квадрантов подключен к опорному входу суммо-разностного блока, второй выход коммутатора квадрантов - к входу масштабного блока, выходы синусно-косршусного датчика угла соединены с другой группой входов суммо-разчостного блока.
2. Преобразователь по л, 1, о т - л и ч а ю щ и и с я тем,, что коммутатор квадрантов содержит четыре ключа и инвертор, вход которого является управляющим входом коммутатора
713:
квадрантов и соединен с управляющими входами первого и второго ключей, выход инвертора подключен к управляющим входам третьего и четвертого ключей, информационные входы первого и четвертого, второго и третьего ключей
попарно объединены и являются информационными входами коммутатора квадрантов, выходы первого и третьего, второго и четвертого ключей попарно объединены и являются выходами коммутатора квадрантов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1984 |
|
SU1169167A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU830471A1 |
| Преобразователь угла поворота вала в последовательность импульсов | 1988 |
|
SU1573537A1 |
| Преобразователь угла поворота вала в последовательность импульсов | 1987 |
|
SU1481884A1 |
| Импульсный преобразователь угла в код | 1980 |
|
SU911582A1 |
| Преобразователь перемещения в число-импульсный код | 1977 |
|
SU674069A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Способ преобразования перемещения в код | 1982 |
|
SU1136314A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Функциональный преобразователь угла поворота вала в код | 1985 |
|
SU1309314A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в устройствах аналого-цифрового преобразования угловой информации. Целью изобретения является упрощение преобразователя за счет уменьшения объема оборудования при сохранении высокой разрешающей способности. Поставленная цель достигается тем, что в преобразователь угла поворота вала, содер- жаищй синусно-косинусный датчик 1 угла, масштабный блок 3, суммо-разност- ный блок 4, блок 5 формирователей огибающих меандров и блок 6 сложения несущих, введен коммутатор 2 квадрантов, на управляющий вход которого подается сигнал управления с блока 6 сложения несущих. Введение коммутатора 2 квадрантов, управляемого с выхода блока 6 сложения несущих, позволило вести масштабирование только одного сигнала датчика угла, имеющего, диапазон высокого уровня, что обеспечило возможность вести обработку сигналов как в масщтабном блоке 3, так и в последующих блоках преобразователя с меньшим числом каналов. 1 3,п. ф-лы 5 8 ил. ;о ел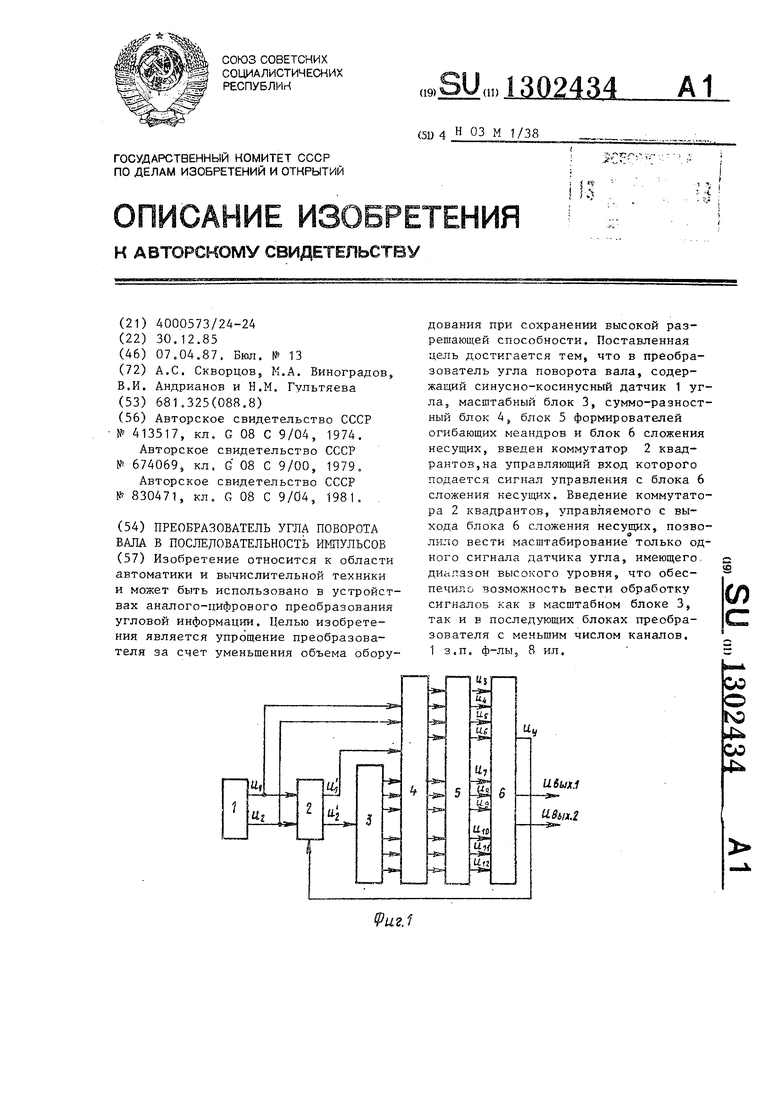
Ри.г.2
з
иг.
З 4 %
/ч/
.
(ьж ч
1f Hff
fJ-4
т
и з 4 u u; a j LL Q ii g я; ; u
Риг. 6
Фиг.7
1
и-г
LL(
1Л2.8
Составитель М, Сидорова Редактор Н, Гунько Техред Л,Олейншс Корректор И„ Муска
Заказ 1225/56 .Тираж 902Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва., , Ра: тцская наб„,, д. 4/5
Производственно-полиграфическое предприятие г, Ужгород,, ул Проектная, 4
| 1972 |
|
SU413517A1 | |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Преобразователь перемещения в число-импульсный код | 1977 |
|
SU674069A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU830471A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
