Изобретение относится к приборостроению, а именно к конструкции бесконтактных опор.
Цель изобретения - расширение эксплуатационных возможностей.
На фиг.1 показан магнитоэлектрический подшипник с аксиально-намагниченным постоянным магнитом, разрез на фиг.2 - подшипник с размещением обмотки управления радиальным положением со стороны внутреннего диаметра магнита и радиально-намагничен- ным постоянным магнитом, вариант;на фиг.З - подшипник с двумя постоянными магнитами, вариант на фиг.4 - схема обмотки управления радиальным положением вала.
Магнитоэлектрический подшипник (фиг,1) содержит кольцевой постоянный магнит 1, закрепленный на вра- щакэдемся валу 2 соосно его оси. На разноименных полюсах кольцевого постоянного магнита 1 установлены маг- нитопроводы 3 и 4, образующие между обращенными друг к другу поверхностями цилиндрический воздушный зазор, в котором размещена кольцевая обмотка 5 управления аксиальным положением вала 2, закрепленная на неподвижной части 6 подшипника. В магнито- проводе 3 выполнена прорезь, образующая между его частями аксиальный воздушный зазор, в котором размещена активная часть обмотки 7 управления радиальным положением вала 2,. закрепленная на неподвижной части 6 подшипника. Немагнитная втулка 8 предназначена для крепления частей маг- нитопровода 3.
На фиг.2 показан вариант подшипника с кольцевым радиально-намагни- ченным постоянным магнитом 1 и прорезью, в которой размещена активная часть обмотки 7 управления, выполненной в магнитопроводе 4 со стороны внутреннего диаметра кольцевого постоянного магнита 1.
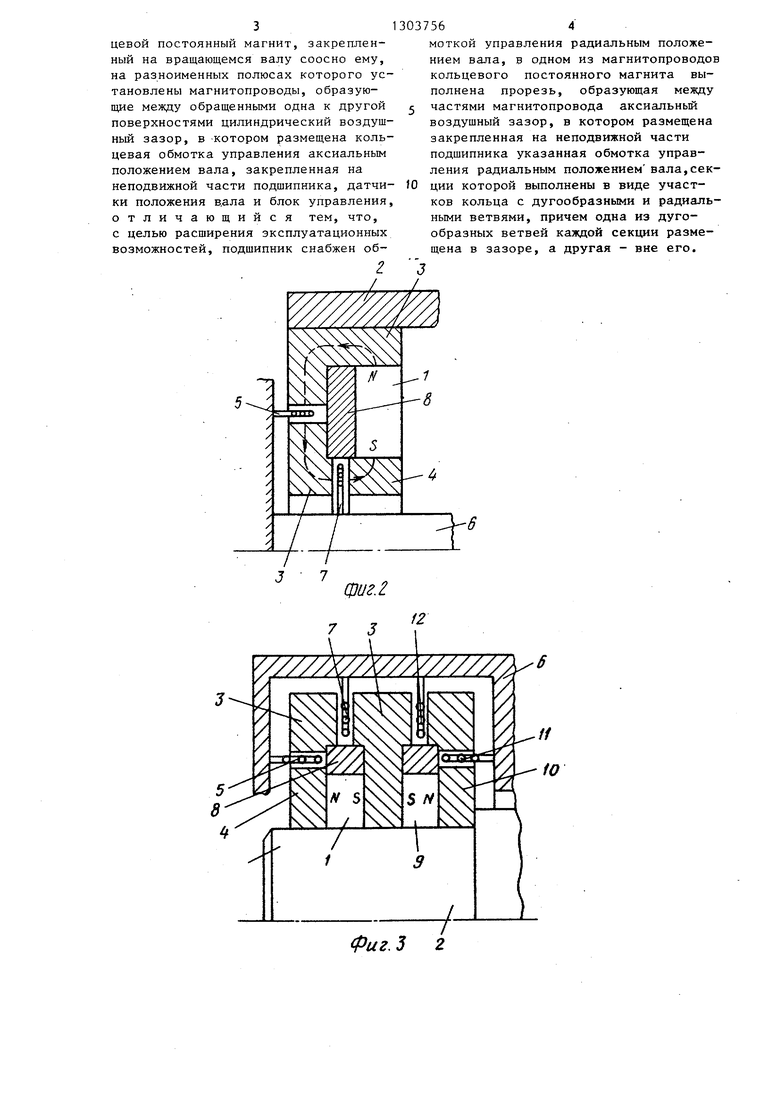
В варианте подшипника с двумя постоянными магнитами (фиг.З) размещенная между магнитами 1 и 9 часть магнитопровода 3 является общей для этих постоянных магнитов. На другом полюсе постоянного магнита 9 установлен магнитопровод 10. Между второй частью магнитопровода 3, установленной на немагнитной втулке 8 магнита 9, и магнитопроводом 10 в зазоре размещена вторая кольцевая обмотка 11 управления аксиальным положением вала 2,, а в магнитопроводе 3 со стороны магнита 9 выполнена вторая прорезь, образующая аксиальный зазор, в котором установлена вторая
обмотка 12 управления радиальным положением вала 2.
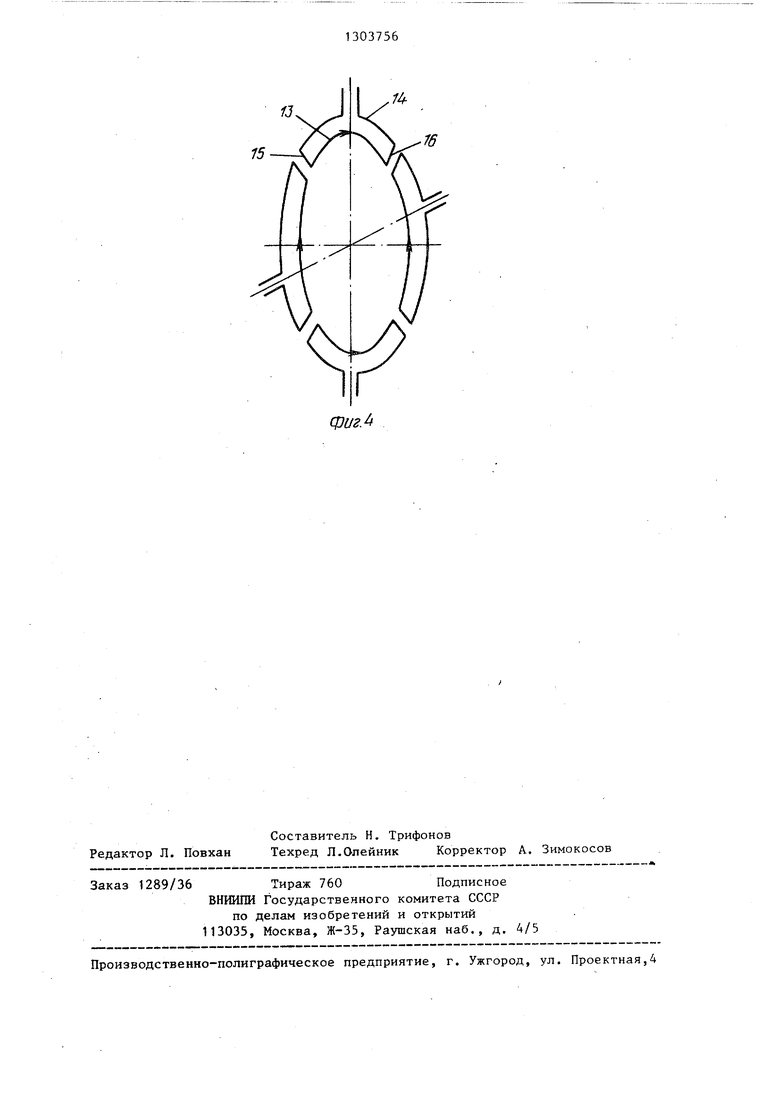
На фиг.4 отдельно показана схема выполнения обмотки 7 управления радиальным положением вала 2. Обмотка
содержит, например, четыре секции, выполненные в виде участков кольца с дугообразными ветвями 13 и 14 и радиальными ветвями 15 и 16. Дугообразные ветви 13 являются активными и
размещены в зазоре между частями магнитопровода, разделенными прорезью, а другие дугообразные ветви 14 размещены вне зазора. Предлагаемое устройство работает следующим образом.
При протекании тока, значение и направление которого определяется системой управления, по секциям обмотки 7 управления радиальным положением вала 2 и кольцевой обмотке 5
управления аксиальным положением вала 2 взаимодействие проводников с током обмоток 5 и 7 с магнитным потоком в зазоре создает усилие, направление которого зависит от направления тока, а величина - от величины тока.
При воздействии внешней силы на вал 2, смещающей его из положения неустойчивого равновесия, датчики положения (не показаны) вала 2 вырабатывают сигнсШ, который, поступая в систему управления, определяет направление и величину тока в обмотках 5 и 7, необходимые для компенсации
внешней силы. Например, при смещении вала 2 (фиг.1) вверх по сигналу с датчика положения происходит увеличение силы тока в верхней секции обмотки 7, и вал 2 смещается в прежнее положение.
Предлагаемый магнитоэлектрический подшипник обладает большими эксплуатационными возможностями по сравнению с известным,поскольку в нем используется магнитный поток от одного магнита для управления положением вала по двум направлениям - радиальному и аксиальному.
55
Формула изобретения
Магнитоэлектрический подшипник, содержащий по крайней мере один коль3
цевой постоянный магнит, закрепленный на вращающемся валу соосно ему, на разноименных полюсах которого установлены магнитопроводы, образующие между обращенными одна к другой поверхностями цилиндрический воздушный зазор, в котором размещена кольцевая обмотка управления аксиальным положением вала, закрепленная на неподвижной части подшипника, датчики положения в.ала и блок управления отличающийся тем, что, с целью расширения эксплуатационных возможностей, подшипник снабжен об037564
моткой управления радиальным положением вала, в одном из магнитопроводов кольцевого постоянного магнита выполнена прорезь, образующая между частями магнитопровода аксиальный воздушный зазор, в котором размещена закрепленная на неподвижной части подшипника указанная обмотка управления радиальным положением вала,сек- O ции которой выполнены в виде участков кольца с дугообразными и радиальными ветвями, причем одна из дугообразных ветвей каждой секции размещена в зазоре, а другая - вне его.
фиг. 2
Фиг.З
fj
15
фиг A
Редактор Л. Повхан
Составитель Н. Трифонов
Техред Л.Олейник Корректор А. Зимокосов
Заказ 1289/36 Тираж 760Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4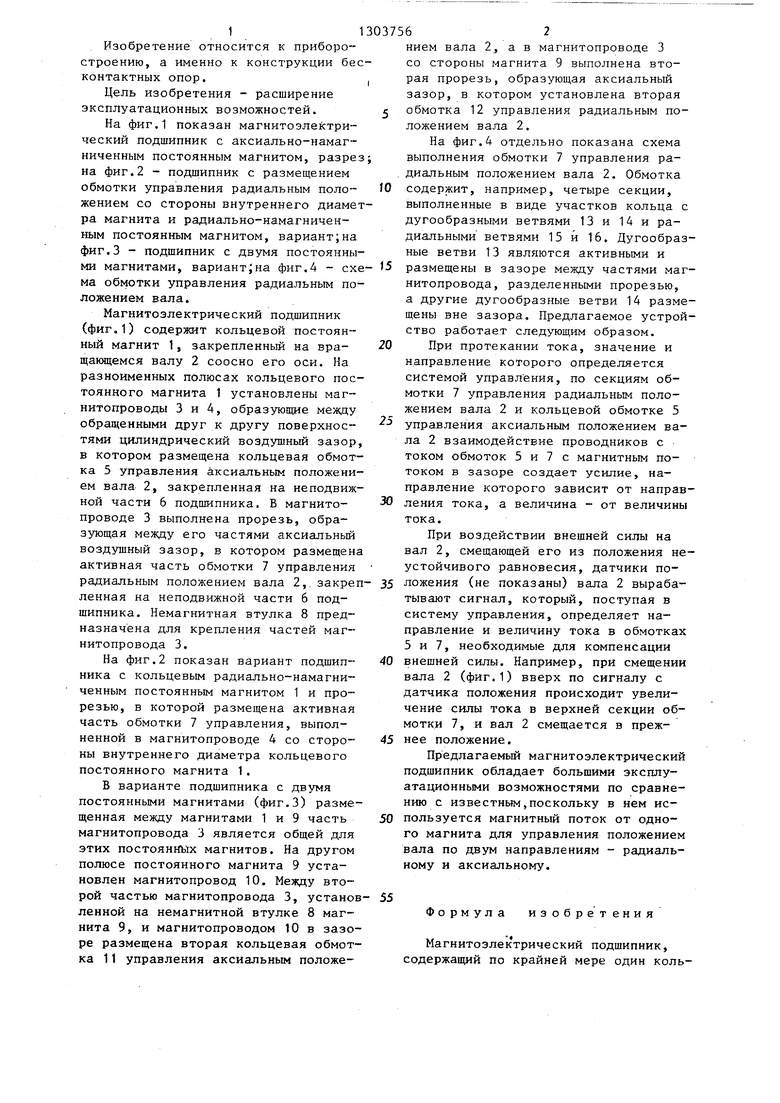
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрическая опора | 1980 |
|
SU1051341A1 |
| Магнитоэлектрический двигатель | 1979 |
|
SU832663A2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2020697C1 |
| Магнитоэлектрическая опора | 1980 |
|
SU1384848A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Магнитоэлектрический двигатель | 1979 |
|
SU886156A1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
Изобретение относится к приборостроению, а именно к конструкциям бесконтактных опор. Цель изобретения- состоит в расширении эксплуатационных возможностей за счет использования магнитного потока одного магнита для управления положением вала по двум -направлениям - радиальному и аксиальному. Магнитоэлектрический подшипник содержит , кольцевой постоянный магнит 1, закрепленный на вращающемся валу 2 соосно его оси.На разноименных полюсах кольцевого постоянного магнита установлены магни- топроводы 3, 4, образующие между обращенными друг к другу поверхностями цилиндрический воздушный зазор, в котором размещена кольцевая обмотка 5 управления аксиальным положением S вала 2, закрепленная на неподвижной части 6 подшипника. В магнитопрово- де 3 выполнена прорезь, образующая между его частями аксиальный воздущ- ный зазор, в котором размещена активная часть обмотки 7 управления радиальным положением вала 2, закрепленная на неподвижной части 6 подшипника. Немагнитная втулка 8 крепит друг относительно друга части магни- топровода 3. При протекании тока, значение и направление которого определяется системой управления, по секциям обмотки 7 управления радиальным положением вала 2 и кольцевой обмотке 5 управления аксиальным положением вала 2 взаимодействие проводников с током обмоток 5 , 7, с магнитным потоком в зазоре создает усилие, направление и величина которого зависят от направления и величины тока. При воздействии внешней силы на вал 2, смещающей его из положения неустойчивого равновесия, датчики положения вала 2 вырабатыв ают сигнал, который, поступая в систему управления, определяет направление и величину тока в обмотках 5, 7, необходимые для компенсации внешней силы . 4 ил.; (С (Л со о со ел 05 ./
| Магнитоэлектрическая опора | 1980 |
|
SU1051341A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
