Изобретение относится к сельскохозяйственному машиностроению, может быть иснользовано для автоматизации управления процессом перегрузки сельскохозяйственной продукции из уборочной машины в самоходное транспортное средство и является усовершенствованием системы по авт. св. N« 884607.
Цель изобретения - обеспечение равномерной загрузки кузова самоходного транспортного средства.
На чертеже приведена структурная схе- .ма систе.мы автоматического управления выгрузным рабочим органом.
Система автоматического управления вы- грузпы.м рабочи.м органом комбайна содержит предварительные усилители 1-4 сигналов от мапштпых антенн 5-7, фазовращатели 8 и 9, сумматоры 10 и II, преобразователи 12 и 13 сигналов, состояшие из нуль-компараторов 14-17, сумматоров 18 и 19 и фильтров 20 и 21 нижних частот, блоки 22 и 23 дискретного перемешения выгрузного рабочего органа, состоящие из сумматоров 24, 25 и задатчиков 26 и 27 опорных напряжений, формирователи 28-31 управляющих воздействий, состоящие из компараторов 32-35 и электронных ключей 36- 39, подключенных к электромагнитам 40--43 гидрорас 1ределителей исполнительных механизмов перемещения выгрузного рабочего органа через контакты 44-47 реле 48, соединенного с выходом компаратора 49 устройства 50 блокировки, при этом первый вход компаратора 49 соединен с источником опорного напряжения Uon, а второй - с выходом сумматора 10. Магпитные гштен- ны 5 и 6, предварительные усилители 1 и 2, фазовращатель 8, сумматор 10, преобразователь 12, блок 22 дискретного перемещения выгрузного органа, формирователи 28 и 29 с исполнительным механизмом перемеще- пия образуют канал управления выгрузньгм органом в горизонтальной плоскости.
Устройство работает следующим обра- зо.м.
При подходе к ко.мбайну порожпего само- транснортного средства с передающим устройством устанавливают переключатели на задатчиках 26, 27 опорных напряжений в нулевые положения. Наводимые в магнитных антеннах 5-7 сигналы усиливаются предварительными усилителями 1--4. Усиленные сигналы от базовой антенны 6 поступают к фазовращателям 8 и 9, где смеп1аются по фазе на 90°, а затем поступают па входы сумматоров 10 и 11. Сигналы с выхода предварительного усилителя 2 и сумматора 10, а также предварительного усилителя 3 и сумматора 11 поступают па входы соответствующих преобразователей 12 и 13 сигналов, где они сначала преобразуются посредством нуль-компараторов 14 17 в .меандры, затем сум.мируются носред
0
5
0
5
0
5
0
ством сумматоров 18 и 19. От сумматоров 18 и 19 импульсные сигналы, длительность которых зависит от взаимного положения излучающего и приемных контуров, посту |ают к фильтрам 20, 21 нижних частот, ГлТе преобразуются в аналоговые сигналы, пропорциональные угловым положениям выгрузного рабочего органа относительно передаю- lero устройства соответственно в горизонтальной и в вертикальной нлоскостях. Если переключатели задатчиков 26, 27 опорных напряжений уетановлены в нулевые положения, то сиг налы с выходов преобразователей 12 и 13 без из.менений проходят на входы формирователей 28-31 управляющих воздействий. В формирователях 28-31 сигналы от блоков 22 и 23 дискретного перемещения выгрузного рабочего органа сравниваются с опорными напряжениями Uj, 14 и Uj, Ц,, которые задают зоны нечувствительности соответственно каналов управления выгрузньгм рабочим органом в горизонтальной и вертикальной плоскостях.
Компараторы 32 и 33, а также 34 и 35 образуют трехпозициопные релейные элементы с зоной нечувствительности, поэтому, если величины сигналов от преобразователей 12 и 13 находятся в пределах зон нечувствительности, которые определяются
5
Ui, Ц и не
Uj, Ц, то выгрузнапряжения.ми
ной рабочий орган не перемещается. Если положепие выгрузного рабочего органа не соответствует положению, при которо.м перегрузка сел1 скохозяйственной продукции происходит без потерь, то срабатывает один из ко.мпараторов 32-35 и посредством электронных ключей 36-39 включаются элек- тро.магниты 40 или 41, 42 или 43 и выгрузной-рабочий орган перемещается в направлении устранения возникшего рассогласования.
Визуально оценив качество заполнения кузова самоходного транспортного средства, посредством переключателей на блоках 22 и 23 дискретного перемещения выгрузного рабочего органа задают прирап1,ения величинам еигналом от преобразователей 12 и 13, что приводит к онре.целенпым угловым смещениям выгрузного рабочего органа в горизонтальной и вертикальной плоскостях.
Устройство 50 блокировки, образованное элементами 1, 2, 8, 10, 48 и 49, работает следующим образом.
Сигнал с выхода сумматора 10, величина которого зависит от расстояния между передающим устройством и магпитными антеннами 5 и 6 в компараторе 49, сравнивается с опорным напряжением Uon. Напряжение на выходе сумматора 10 больше Uon, если самоходное транспортное средство находится относительно комбайна в положении при которо.м возможна передача урожая без потерь. При этом компаратор 49 включает реле 48, вк почая систему.
1304775 34
При отъезде загруженного самоходногоавт. св. К° 884607, отличающаяся тем, что,
транспортного средства устройство 50 бло-с целью обеспечения равномерной загрузки
кировки отключает выходы устройства откузова само.ходного транспортного средства,
исполнительных механизмов, в результатеона снабжена управляемыми блоками дисчего прекраадается отслеживание выгрузнымкретного перемещения выгрузного рабочего
рабочим органом транспортного средства. органа в горизонтальной и вертикальной
плоскостях, посредством которы.х выходы
Формула изобретенияпреобразователей соединены с входами соотСистема автоматического управления вы-ветствуюш.их формирователей управляющегрузным рабочим органом комбайна пого воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления выгрузным рабочим органом комбайна | 1980 |
|
SU884607A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942095A1 |
| Тренажер транспортного средства | 1985 |
|
SU1444863A1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УБОРКИ ЗЕРНА КОМБАЙНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462019C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ БИОРИТМА | 2011 |
|
RU2480784C1 |
| Система контроля транспортировки специальных грузов | 2019 |
|
RU2725769C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| Измеритель амплитудно- и фазочастотной характеристики СВЧ-тракта | 1990 |
|
SU1721546A1 |
| Регулятор загрузки рабочих органов уборочных сельскохозяйственных машин | 1983 |
|
SU1134132A1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2010 |
|
RU2429544C1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - обеспечение равномерной загрузки кузова самоходного транспортного средства. Система автоматического управления выгрузным рабочим органом (ВРО) комбайна содержит предварительные усилители 1-4, магнитные антенны 5-7, фазовращатели 8, 9, сумматоры 10, 11 и преобразователи 12, 13 сигналов. Преобразователи 12, 13 сигналов состоят из нуль-компараторов 14-17, сумматоров 18, 19 и фильтров 20, 21 нижних частот. Блоки 22, 23 дискретного перемещения ВРО состоят из сумматоров 24, 25 и задатчиков 26, 27 опорных напряжений. Формирователи 28-31 управляющих воздействий состоят из компараторов 32-35 и электронных ключей 36-39. Электронные ключи 36-39 соединены с электромагнитами 40-43 через контакты 44-47 реле 48. Реле 48 соединено с выходом компаратора 49 устройства блокировки 50. Система отслеживает положение ВРО относительно кузова. По визуальной оценке качества заполнения кузова оператор переключателями на блоках 22, 23 дискретного перемещения ВРО задает соответствующие приращения сигналам от преобразователей 12, 13, что приводит к определенным перемещениям ВРО в горизонтальной и вертикальной плоскостях. 1 ил. 9 4 О1 INJ /з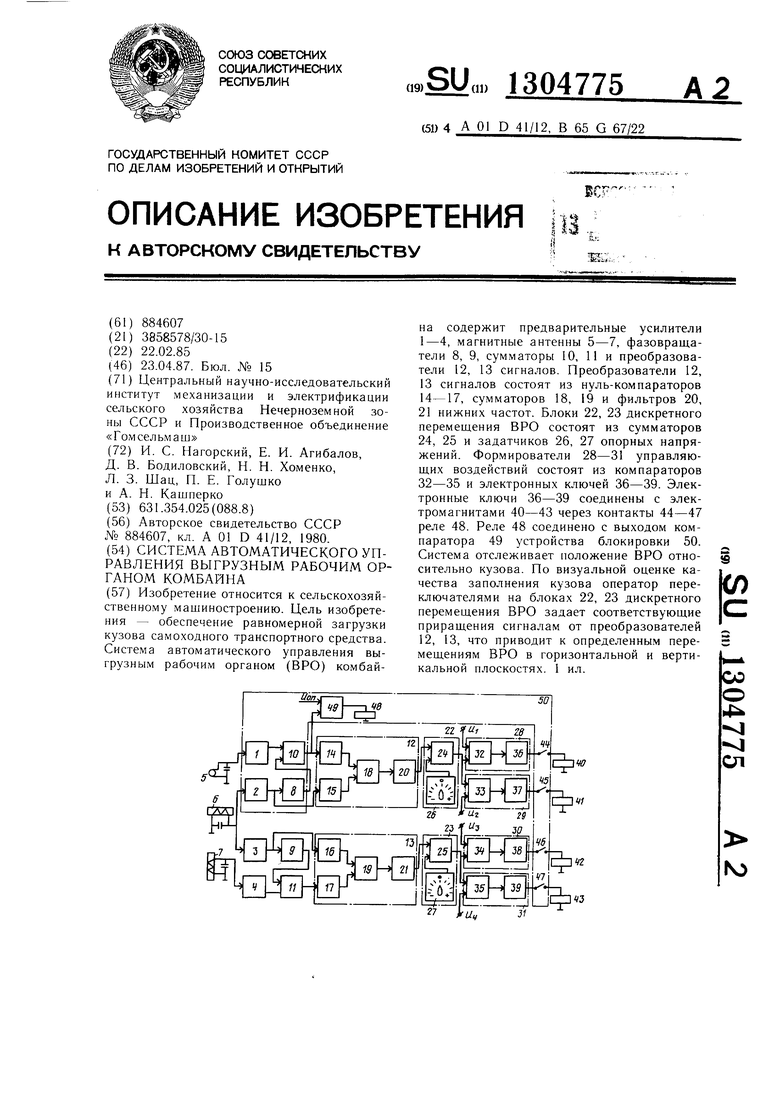
| Система автоматического управления выгрузным рабочим органом комбайна | 1980 |
|
SU884607A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
