(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫГРУЗНЫМ РАБОЧИМ ОРГАНОМ КОМБАЙНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления выгрузным рабочим органом комбайна | 1985 |
|
SU1304775A2 |
| Система управления процессомпЕРЕгРузКи МАТЕРиАлА | 1979 |
|
SU818515A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1990 |
|
SU1798810A2 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| Измеритель проводимости земной поверхности | 2024 |
|
RU2820896C1 |
| Измеритель проводимости земной поверхности | 1990 |
|
SU1784935A1 |
| Кабелеизвлекающая машина | 1983 |
|
SU1143809A1 |
| АНТЕННОЕ УСТРОЙСТВО | 2008 |
|
RU2462833C2 |
| ПЕРЕДВИЖНОЙ ПЕРЕГРУЗЧИК ДЛЯ ЗЕРНА СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2009 |
|
RU2400963C1 |
| КОМБАЙН ДЛЯ ЯРУСНОЙ УБОРКИ РАСТЕНИЙ | 2001 |
|
RU2186479C1 |

S
Изобретение относится к сельскохозяйственному машиностроению, а именно к конструкции самоходных, уборочных машин, и может быть использовано для автоматизации технологического процесса выгрузки материала.
Известна система управления выгрузным рабочим органом комбайна, содержащая передающее устройство с рамочной антенной на независимом транспортном средстве, две горизонтальные взаимноперпендикулярные магнитные антенны на выгрузном рабочем органе, причем одна из них (базовая) расположена в вертикальной плоскости, проходящей через его продольную ось, управляющее устройство и исполнительный механизм горизонтального перемещения выгрузного рабочего органа 1.:
Известная система не обеспечивает выгрузку материала из самоходного комбайна в независимое транспортное средство без потерь, так как не позволяет в процессе выгрузки регулировать положение вы-грузного рабочего органа в вертикальной плоскости.
Цель изобретения - уменьшение потерь при выгрузке материала из комбайна в независимое транспортное средство.
Указанная цель достигается тем, что система снабжена на. дополнительной магнитной антенной, механизмом вертикального перемещения выгрузного рабочего органа; и устройством блокировки, причем дополнительная магнитная антенна установлена в вертикальной плоскости перпендикулярно базовой магнитной антенне, а поворотная - в вертикальной плоскости, часть вы10грузного рабочего органа связана с магнитными антеннами посредством обратной свя- зи, выполненной в виде четырехзвенного шарнирного механизма, а управляющее устройство связано с исполнительным механизмом 5 посредством устройства блокировки, соединенного с магнитными антеннами.
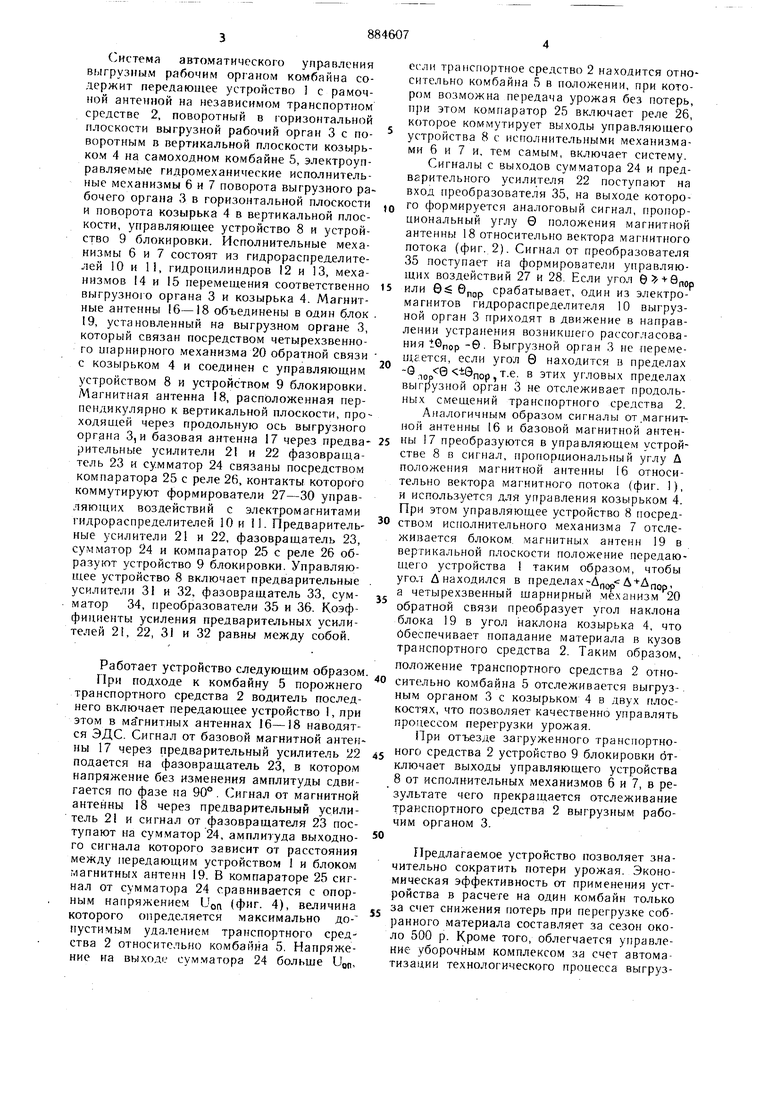
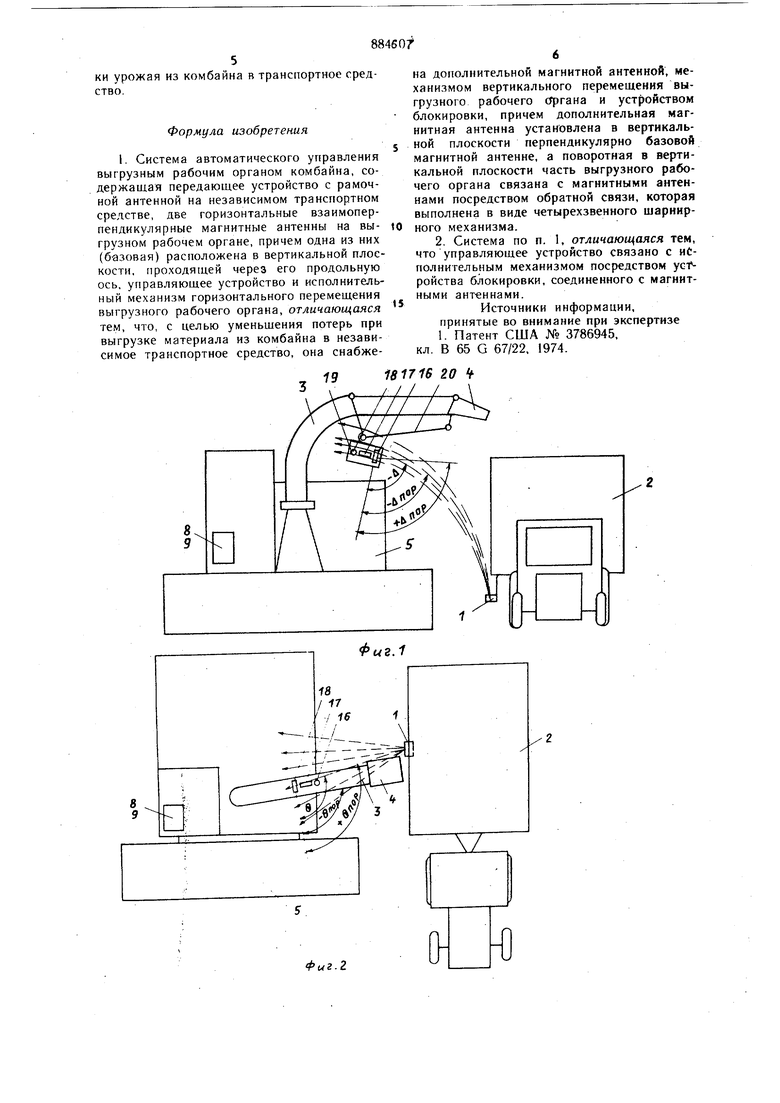
На фиг. I изображен уборочный комплекс вид спереди; на фиг. 2 - то же, вид сверху , на фиг. 3 - схема соединения элементов сие 20 темы автоматического управления выгрузным рабочим органом; на фиг. 4 -структурная схема управляющего устройства и устройства блокировки.
Система автоматического управления выгрузным рабочим органом комбайна содержит передающее устройство I с рамочной антенной на независимом транспортном средстве 2, поворотный в горизонтальной плоскости выгрузной рабочий орган 3 с поворотным в вертикальной плоскости козырьком 4 на самоходном комбайне 5, электроуправляемые гидромеханические исполнительные механизмы 6 и 7 поворота выгрузного рабочего органа 3 в горизонтальной плоскости и поворота козырька 4 в вертикальной плоскости, управляющее устройство 8 и устройство 9 блокировки. Исполнительные механизмы б и 7 состоят из гидрораспред.елителей 10 и П, гидроцилиндров 12 и 13, механизмов 14 и 15 перемещения соответственно выгрузного органа 3 и козырька 4. Магнитные антенны 16-18 объединены в один блок 19, установленный на выгрузном органе 3, который связан посредством четырехзвенного шарнирного механизма 20 обратной связи с козырьком 4 и соединен с управляющим устройством 8 и устройством 9 блокировки. Магнитная антенна 18, расположенная перпендикулярно к вертикальной плоскости, проходящей через продольную ось выгрузного органа 3, и базовая антенна 17 через предварительные усилители 2 и 22 фазовращатель 23 и сумматор 24 связаны посредством компаратора 25 с реле 26, контакты которого коммутируют формирователи 27-30 управляющих воздействий с электромагнитами гидрораспределителей 10 и 11. Предварительные усилители 21 и 22, фазовращатель 23, сумматор 24 и компаратор 25 с реле 26 образуют устройство 9 блокировки. Управляющее устройство 8 включает предварительные усилители 31 и 32, фазовращатель 33, сумматор 34, преобразователи 35 и 36. Коэффициенты усиления предварительных усилителей 21, 22, 31 и 32 равны между собой.
Работает устройство следующим образом
При подходе к комбайну 5 порожнего транспортного средства 2 водитель последнего включает передающее устройство 1, при этом в магнитных антеннах 16-18 наводятся ЭДС. Сигнал от базовой магнитной антенны 17 через предварительный усилитель 22 подается на фазовращатель 23, в котором напряжение без изменения амплитуды сдвигается по фазе на 90°. Сигнал от магнитной антенны 18 через предварительный усилитель 21 и сигнал от фазовращателя 23 поступают на сумматор 24, амплитуда выходного сигнала которого зависит от расстояния между передающим устройством 1 и блоком магнитных антенн 19. В компараторе 25 сигнал от сумматора 24 сравнивается с опорным напряжением Lon (фиг. 4), величина которого определяется максимально до- пустимым удалением транспортного средства 2 относительно комбайна 5. Напряжение на выходе сумматора 24 больше УОЦ,
если транспортное средство 2 находится относительно комбайна 5 в положении, при котором возможна передача урожая без потерь, при этом компаратор 25 включает реле 26, которое коммутирует выходы управляющего устройства 8 с исполнительными меха})измами 6 и 7 и, тем самым, включает систему.
Сигналы с выходов сумматора 24 и предварительного усилителя 22 поступают на вход преобразователя 35, на выходе которого формируется аналоговый сигнал, пропорциональный углу 0 положения магнитной антенны 18 относительно вектора магнитного потока (фиг. 2). Сигнал от преобразователя 35 поступает на формирователи управляющих воздействий 27 и 28. Если угол или вй врор срабатывает, один из электромагнитов гидрораспределителя 10 выгрузной орган 3 приходят в движение в направлении устранения возникшего рассогласования IGpop 0- Выгрузной орган 3 ffe перемещается, если угол Э находится в пределах пор, т-е. в этих угловых пределах выгрузной орган 3 не отслеживает продольных смещений транспортного средства 2.
А} алогичным образом сигналы от,магнитной антенны 16 и базовой магнитной антенны 17 преобразуются в управляющем устройстве 8 в сигнал, пропорциональный углу Д положения магнитной антенны 16 относительно вектора магнитного потока (фиг. 1), и используется для управления козырьком 4. При этом управляющее устройство 8 посредством исполнительного механизма 7 отслеживается блоком, магнитных антенн 19 в вертикальной плоскости положение передающего устройства 1 таким образом, чтобы угол Д находился в пределах-Др р Д+Дпор, а четырехзвенный щарнирный механизм 20 обратной связи преобразует угол наклона блока 19 в угол наклона козырька 4, что Обеспечивает попадание материала в кузов транспортного средства 2. Таким образом,
положение транспортного средства 2 относительно комбайна 5 отслеживается выгрузНым органом 3 с козырьком 4 в двух плоскостях, что позволяет качественно управлять процессом перегрузки урожая.
При отъезде загруженного транспортноного средства 2 устройство 9 блокировки отключает выходы управляющего устройства 8 от исполнительных механизмов 6 и 7, в результате чего прекращается отслеживание транспортного средства 2 выгрузным рабочим органом 3.
Предлагаемое устройство позволяет значительно сократить потери урожая. Экономическая эффективность от применения устройства в расчете на один комбайн только за счет снижения потерь при перегрузке собранного материала составляет за сезон около 500 р. Кроме того, облегчается управление уборочным комплексом за счет автоматизации технологического процесса выгрузки урожая из комбайна в транспортное средство.
Формула изобретения
. Система автоматического управления выгрузным рабочим органом комбайна, содержащая передающее устройство с рамочной антенной на независимом транспортном средстве, две горизонтальные взаимоперпендикулярные магнитные антенны на выгрузном рабочем органе, причем одна из них (б-азовая) расположена в вертикальной плоскости, проходящей через его продольную ось, управляющее устройство и исполнительный механизм горизонтального перемещения выгрузного рабочего органа, отличающаяся тем, что, с целью уменьщения потерь при выгрузке материала из комбайна в независимое транспортное средство, она снабже19 181716 го .г
на дополнительной магнитной антенной, механизмом вертикального перемещения выгрузного рабочего сГргана и устройством блокировки, причем дополнительная магнитная антенна установлена в вертикальной плоскости перпендикулярно базовой магнитной антенне, а поворотная в вертикальной плоскости часть выгрузного рабочего органа связана с магнитными антеннами посредством обратиой связи, которая выполнена в виде четырехзвениого шарнирного механизма.
Источники информации,
принятые во внимание при экспертизе
X
п
ч
MZl
HI
Фи.Ъ
Фкг.1
