Изобретение относится к физической культуре и спорту, в частности к устройствам для тренировки мышц, и может быть иснользовано для тренировки спортсменов, реабилитации больных с заболеванием периферийной нерЕзной системы и биомеханических исследований.
Целью изобретения является новьпиение эффективности тренировки путем создания панравленного движения рук спортсмена.
На фиг.1 изображена схема устройства, вид сбоку; на фиг.2 - крепление привода к стержню и основанию; па фиг.З - то же, к смежным стержням.
Устройство содержит установленный па основании транспортер 1, размещенную па ленте транспортера каретку 2 с сиденьем, ограничители 3 и 4 перемещения каретки, упоры 5 для ног, средство 6 для нагру- жения рук, установленное на основании и выполненное в виде шарнирно соединенных стержней 7-9. Каретка 2 связана с ограничителями 3 и 4 двумя приводами 10 и 11, один из которых, например 10, является тор- .мозным. Оба привода выполнены в виде гидроцилиндров. Каретка снабжена датчиками скорости 12 и положения 13 каретки. Приводы 10 и 11 и датчики 12 и 13 соединены с блоком 14 программного управления. На упорах 5 для ног установлен датчик 15 определения усилий. С каждым из стержней 7-9 соединены датчики скорости и положения стержней относительно один другого и основания и по крайней мере два привода, один из которых является тормозным (не показаны). На конечной точке стержней 9 устаповлепы по крайней мере три датчика 16 для определения усилий занимающегося (фиг.1).
Блок 14 нрограм.много управления на базе микро-ЭВМ предназначен для контроля и управления перемещениями каретки 2 п стержней 7-9 по определенной програм.ме или согласно силовым возможностям занимающегося, а также для управления движением ленты транспортера.
Привод, размещенный на стержне 7, состоит из зубчатого ко.1еса с внутренним зацеплением зубьев 17, соединенного со стержнем 7, зубчатого колеса 18, входящего в зацепление с зубьями 17 колеса и электродвигателя 19. Зубчатое колесо 18 закреплено па валу 20 электродвигателя 19. Тормозпой привод имеет аналогичную конструкцию, но вместо электродвигателя применяют электротормоз 21. Зубчатые колеса, электродвигатель п тормоз размен ены в основании (фиг.2).
Привод, размещенный на смежных стержнях 7,8, идентичен приводу, размещенному на стержне 7. Электродвигатель 22 и электротормоз 23 закреплены на стержне 8. Зубчатое колесо 24 с внутренним зацеплением зубьев закреплено на стержне 7, который связан осью 25 со стержнем 8 с
возможностью поворота один относительно другого.
Устройство работает следующим образом. Рассматривают работу устройства на примере тренировки академической гребли.
Спортсмен размещается на сидении каретки 2, упираясь нога.ми в упор 5, взяв- щись руками за рукоятки стержней 9. При работе в режиме произвольной тренировки при выполпении фазы заноса
спортсмен своими усилиями перемещает каретку к упору 5 для ног вместе с конечными точками стержней 9. Тормозные приводы стержней 7---9, получая сигналы от блока 14 управления, могх т создавать сопротивление спортсмену, адекватное сопротивлению, преодолеваемому при перемещении весел в естественных ус. ювиях.
При выполнении фазы проводки каретка 2 перемещается спортсменом к опоре 7, а конечные точки стержней 9 переменнаются
по траектории с ритмоскоростными и силовыми параметрами, определяемыми спортсменом. Тормозные приводы, управляемые блоком 14 управления, создают спортсмену сопротивление, пропорциональное его усилиям, определяемы.м датчиками 16, сигналы
от которых поступают в блок управления. Во время имитации гребли на байдарках и каноэ конечные точки стержней 9 перемещаются спортсменом по заданным траекториям с ритмоскоростными и силовыми пара.метрами, определяемыми спортсменом. При этом каретка 2 перемещается по ленте транспортера к упору 5 для ног, а сама лента движется в противоположную сторону со скоростью, пропорциональной усилиям спортсмена, которые он прикладывает к конечным точкам стержней 9.
В случае использования устройства для тренировки мыщц ног тормозной привод 10 каретки 2 может создать силу сопротивления спортсмену, пропорциональную его усилиям, прилагаемым к упору 5 для ног, а
привод перемещает каретку с требуемыми ритмоскоростными параметрами.
При реабилитации больных с заболеваниями периферической нервной системы тормозные приводы каретки 2 и средства 6 для нагружения рук отключены, а каретка 2
и стержни 9, соединенные с руками больного, перемещаются с помощью приводов по траекториям и с ритмоскоростными параметрами, запро раммирозанными в блоке 14 управления.
Для выполнения пневмовибромассажа с
конечной точкой одного из стержней 9 соединяется пневмовибромассажер, который, контактируя с телом больного,переме1цается стержнями 7-9 по определенной траектории и со скоростью, запрограммированной в блоке 14 управления.
Устройство может использоваться и для тренировки в беге, при этом приводы 10 и 11 отсоединяются от каретки 2, последняя
снимается с ленты транспортера 1. Тренировка в беге может осуществляться обычным способом, а также с применением средства 6 для нагружения рук, которое соединяется с телом занимающегося, а тормозные приводы оказывают сопротивление занимающемуся при беге по бегущей ленте, меняющееся по программе или пропорционально усилиям занимающегося, определяемым датчиками 16. Скорость бегущей ленты 1 регулируется блоком 14 управле ния и может изменяться в зависимости от определяемых датчиками 16 усилий занимающегося.
Формула изобретения
1. Устройство для тренировки спортсменов, содержащее основание, транспортер, размещенную на ленте транспортера каретку
с сиденьем, ограничители перемещения каретки, упоры для ног, средство для нагружения рук, датчики положения каретки, блок программного управления, отличающееся тем, что, с целью повыщения эффективности тренировки путем создания направленного движения рук спортсмена, оно снаб- жеН О приводами каретки,и средством для нагружения рук, последнее выполнено в виде трехзвенных щарнирно соединенных стержней, причем каретка и каждый стержень имеют по два привода, один из которых является тормозным, при этом приводы и введенные в устройство датчики определения усилий сопротивления спортсмену, положения и скорости перемещения стержней электрически соединены с блоком управления. 2. Устройство по п. 1, отличающееся тем, что упоры для ног закреплены на ограничителе перемещения каретки.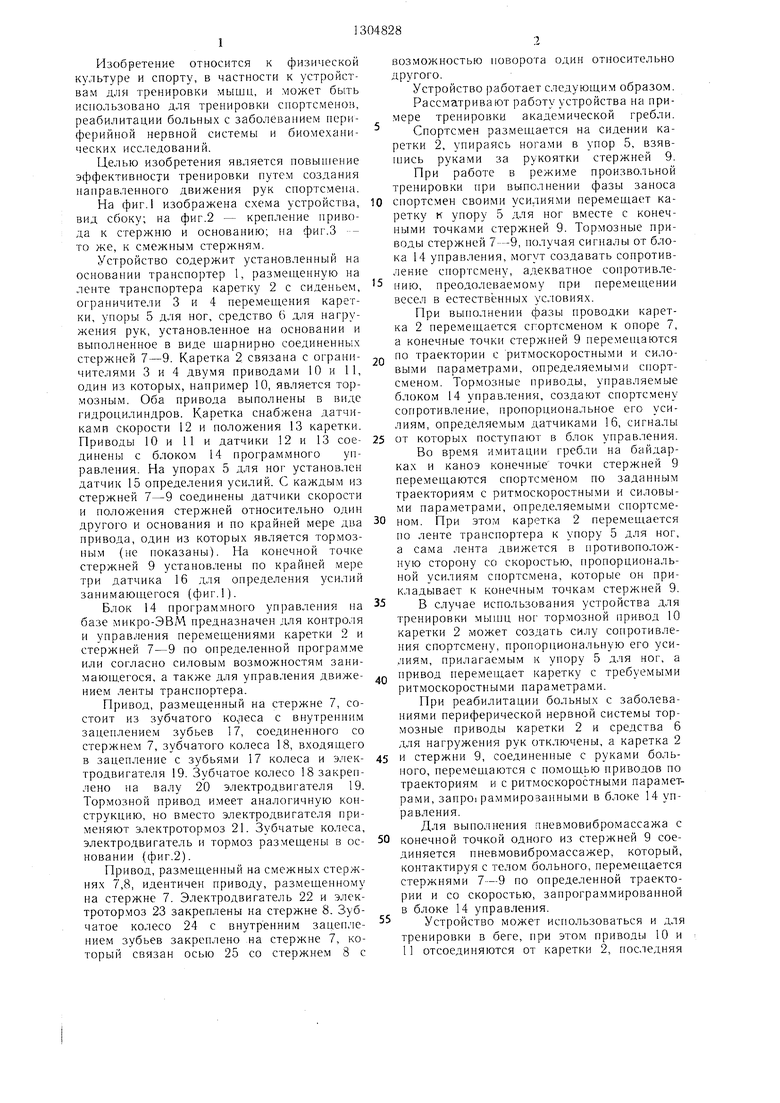

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ | 2012 |
|
RU2512792C1 |
| Устройство для тренировки мышц | 1990 |
|
SU1720666A1 |
| СПОСОБ ИМИТАЦИИ УЧАСТИЯ СПОРТСМЕНА БИАТЛОНИСТА ИЛИ ЛЫЖНИКА В СОРЕВНОВАНИЯХ ЛЮБОГО УРОВНЯ, В ТРЕНИРОВКАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2689445C1 |
| СПОСОБ ТРЕНИРОВКИ ГРЕБЦОВ И ТРЕНАЖЕР-ЭРГОМЕТР ДЛЯ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 1999 |
|
RU2162003C1 |
| Устройство для тренировки гребцов | 1989 |
|
SU1655525A1 |
| Бегущая дорожка | 1986 |
|
SU1395344A1 |
| Устройство для тренировки спортсменов | 1990 |
|
SU1771772A1 |
| ТРЕНАЖЕР ДЛЯ СПОРТСМЕНОВ-БАЙДАРОЧНИКОВ | 2001 |
|
RU2182506C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| Способ коррекции биомеханических параметров командной техники гребли | 2016 |
|
RU2630436C1 |

Изобретение относится к спортивно.му инвентарю и позволяет повысить эффективность тренировки путем создания направленного движения рук спортсмена. Устройство содержит транспортер 1, каретку 2 с сиденьем, которая связана с ограничителями 3 и 4 приводами 10 и 11, один из кото- ры.х может быть тормозным. Средство 6 для нагружения рук спортсмена выполнено в виде шарнирно соединенных стержней 7-9. Блок 14 программного управления связан с приводами и датчиками скорости и положения, размещенными на каретке 2, упоре для ног, на каждом стержне 7-9. Каждый стержень снабжен двумя приводами, один из которых является тормозным. С помощью блока 14 управления осуществляется перемещение каретки 2 и стержней 7-9 по определенной программе или согласно силовым возможностям спортсмена, контролируемым датчика.ми, 1 з.п. ф-лы. 3 ил. (Л ОС о 00 to 00 ////7//// Фиг.1
Фиг.2
23
Фиг.З
| Установка для тренировкигРЕбцОВ | 1979 |
|
SU793584A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
