Изобретение относится к измерительной технике и предназначено для измерения статических и динамических нагрузок растяжения-сжатия при прочностных испытаниях деталей и агрегатов самолета.
Цель изобретения - расширение функциональных возможностей за счет обеспечения измерения знакопеременных нагрузок и повышение точности.
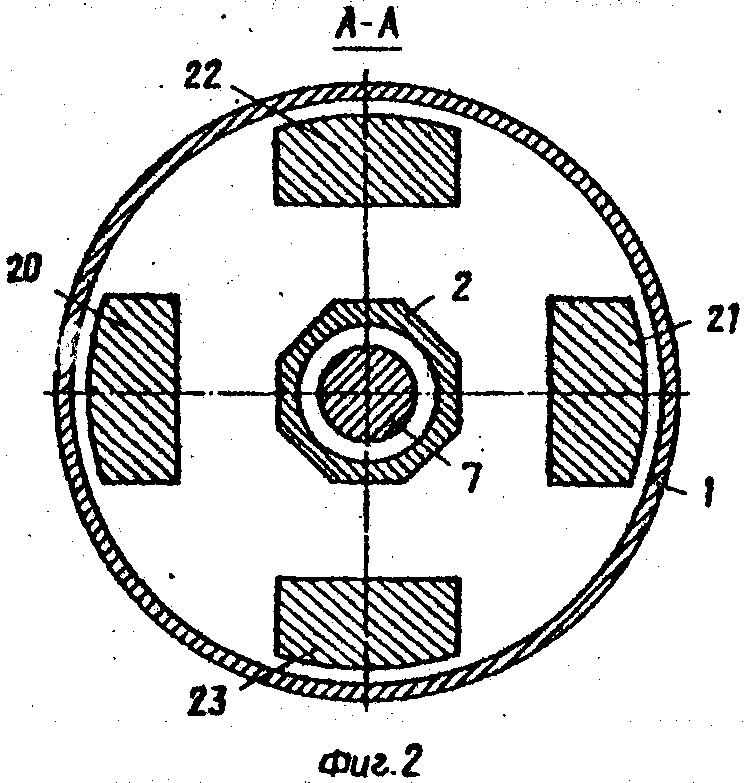
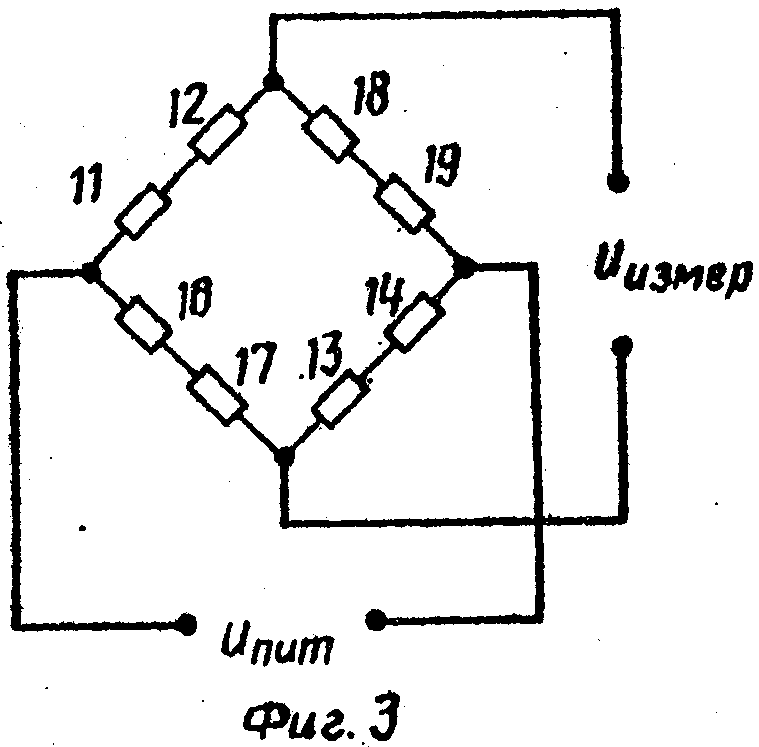
На фиг. 1 - изображен датчик силы, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - схема объединения тензорезисторов в мостовую схему.
Тензорезисторный датчик силы содержит корпус 1 и упругий трубчатый элемент 2, внутри которого, в средней части 3, закреплен первый силовводящий элемент 4, выполненный в виде стержня с шаровой опорой 5, направляющей 6, упором 7 и резьбовой частью 8.
Силовводящий элемент 4 выступает одним концом 9 за верхний торец 10 трубчатого элемента 2. Между верхним торцом 10 и средней частью 3 установлены тензорезисторы 11-14, а между нижним торцом 15 и средней частью 3 - тензорезисторы 16-19.
Упругий трубчатый элемент 2 снабжен четырьмя П-образными ребрами 20-23. Ребро 20 имеет концы 24 и 25, а ребро 21 - концы 26 и 27 (концы ребер 22 и 23 на чертежах не показаны). П-образные ребра 20 и 21 обращены концами 24, 25 и 26, 27 друг к другу и установлены в одной плоскости. Аналогично, но в перпендикулярной плоскости установлены П-образные ребра 22 и 23.
Концы 24 и 25, 26 и 27 ребер 20 и 21, как и концы ребер 22 и 23 жестко соединены с верхним 10 и нижним 15 торцами трубчатого элемента 2, например, путем изготовления их совместно с трубчатым элементом из одной заготовки металла.
Силовводящий элемент 4 со стороны, противоположной концу 9, имеет специальную гайку 28 с направляющей 29.
Направляющие 6 и 29 взаимодействуют с радиальными опорами 30 и 31, размещенными соответственно в кольцевых углублениях 32 и 33 концов 24 и 26, 25 и 27 ребер 20 и 21.
Со стороны торца 15 упругого трубчатого элемента 2 расположен кольцевой выступ 34 с резьбой 35 для подсоединения к П-образным ребрам второго силовводящего элемента 36, выполненного, например, в виде проушины.
Между П-образными ребрами установлены донья 37 и 38, которые совместно с корпусом 1 образуют герметичную емкость 39, которая заполняется нейтральной по отношению к тензорезисторам 11-14 и 16-19 жидкостью.
Датчик работает следующим образом.
Под действием усилия Р1 конец 9 силовводящего элемента 4 перемещается вверх (см. фиг. 1), увлекая за собой среднюю часть 3 упругого трубчатого элемента 2. При этом тензорезисторы 11-14 сжимаются, а тензорезисторы 16-19 растягиваются (см. фиг. 3), поскольку трубчатый элемент 2 верхним концом 10 и нижним торцом 15 подсоединен к П-образным ребрам 20-23, на которые со стороны второго элемента 36 через кольцевой выступ 34 передается усилие Р2, направленное вниз, но равное по величине усилию Р1.
Поскольку тензорезисторы 11-14 и 16-19 включены попарно в мостовую схему в чередующемся порядке, то деформации растяжения и сжатия суммируются, увеличивая тем самым выходной сигнал примерно в два раза.
При приложении к датчику силы внецентренной нагрузки возникают от разложения сил по направлениям два усилия: Р, действующее вдоль оси датчика силы, и Q, действующее в перпендикулярном направлении.
Боковое усилие Q создает изгибающий момент М1= Q˙ а, где а - плечо от продольной оси 40 шаровой опоры до срединной плоскости 41.
Чтобы исключить пластические деформации в местах наклейки тензорезисторов 11-14 и 16-19 в работу включаются радиальные опоры 30 и 31, которые препятствуют перемещению конца 9 от усилия Q, при этом на опорах 30 и 31 возникают силы Х1 и Х2, которые создают момент М2 =  (Х1+Х2)b, где b - плечо между силами Х1 и Х2.
(Х1+Х2)b, где b - плечо между силами Х1 и Х2.
Момент М2 равен по величине и противоположен по направлению моменту М1. Это позволяет практически избавиться от влияния изгиба на выходной сигнал мостовой схемы датчика. Однако малая доля изгиба может передаваться на упругий трубчатый элемент, поскольку в радиальных опорах 30 и 31 может быть зазор, но величина этого изгиба исключается самой мостовой схемой.
При изменении температуры окружающей среды, например, при одностороннем нагреве датчика силы могут возникнуть температурные неоднородности в трубчатом элементе 2, что вызовет местную температурную деформацию, которая будет воспринята частью тензорезисторов. Чтобы избежать это и тем самым повысить точность измерения датчика силы, внутрь его емкости 39 заливается жидкость, которая передает нагрев на всю поверхность упругого элемента 2. (56) Макаров Р. А. Тензометрия в машиностроении. М. : 1975, с. 125-142.
Бауманн Э. Измерение сил электрическими методами. М. : 1978, с. 252, рис. 3.66.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензорезисторный датчик силы | 1982 |
|
SU1027546A1 |
| УПРУГИЙ ЭЛЕМЕНТ ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА СИЛЫ | 2013 |
|
RU2526228C1 |
| Датчик силы | 1990 |
|
SU1723468A1 |
| Устройство для передачи нагрузки на тензорезисторный датчик силы | 1982 |
|
SU1016703A1 |
| Упругий элемент тензорезисторного датчика силы | 1988 |
|
SU1522050A1 |
| ПОЛУПРОВОДНИКОВЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2829304C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2794992C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2013 |
|
RU2533536C1 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2023 |
|
RU2813092C1 |
| Тензорезисторный датчик силы | 1984 |
|
SU1185129A1 |
Изобретение относится к измерительной технике и позволяет расширить функциональные возможности за счет обеспечения измерения знакопеременных нагрузок и повысить точность измерений. Внутри упругого трубчатого элемента 2, в средней его части, размещен первый силовводящий элемент 4 в виде стержня с шаровой опорой 5. На торце 15 упругого элемента 2 расположен кольцевой выступ 34, соединенный с вторым силовводящим элементом 36. Под действием приложенного к датчику усилия силовводящий элемент 4 перемещается вверх вместе со средней частью 3 трубчатого элемента. С второго силовводящего элемента 34 на П-образные ребра, к которым подсоединен трубчатый элемент 2, передается усилие P2 , равное по величине усилию P1 и направленное вниз. Деформации растяжения и сжатия трубчатого элемента суммируются благодаря включению тензорезисторов 11 - 14 и 16 - 19 в мостовую схему попарно в чередующемся порядке. Для компенсации погрешностей из-за изменений температуры окружающей среды емкость 39 внутри датчика заполняется жидкостью. 3 ил.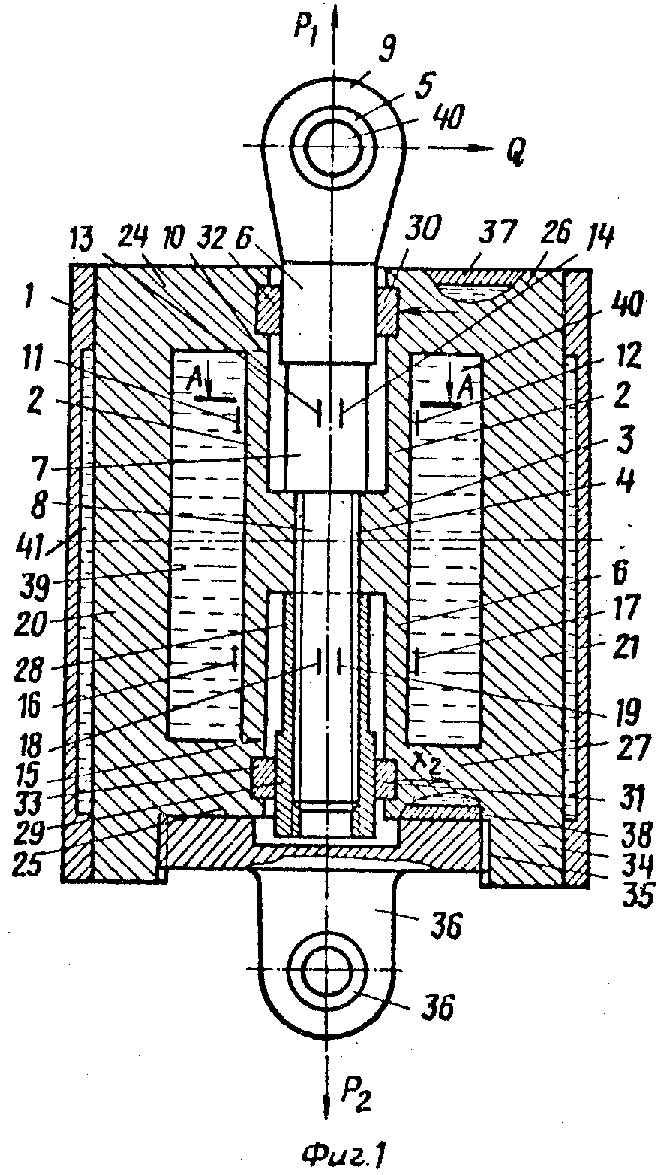
ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ, содержащий установленный в корпусе упругий трубчатый элемент, внутри которого, в его средней части, закреплен первый силовводящий элемент в виде стержня, а на наружной поверхности трубчатого элемента, между средней частью и каждым торцом, установлены тензорезисторы, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения измерения знакопеременных нагрузок и повышения точности, упругий трубчатый элемент снабжен не менее чем двумя П-образными ребрами, которые обращены концами друг к другу, установлены в одной плоскости, проходящей через линию действия измеряемого усилия, и жестко соединены с торцами упругого трубчатого элемента, причем ребра снабжены вторым силовводящим элементом и на них выполнены радиальные направляющие опоры, в которых размещены концы первого силовводящего элемента.
