Известные инерциальные системы навигации не обеспечивают достаточной точности из-за трения в подшипниках, неравномерного износа
их и т. д.
Предлагаемый гироскоп позволяет получить требуемую точность.
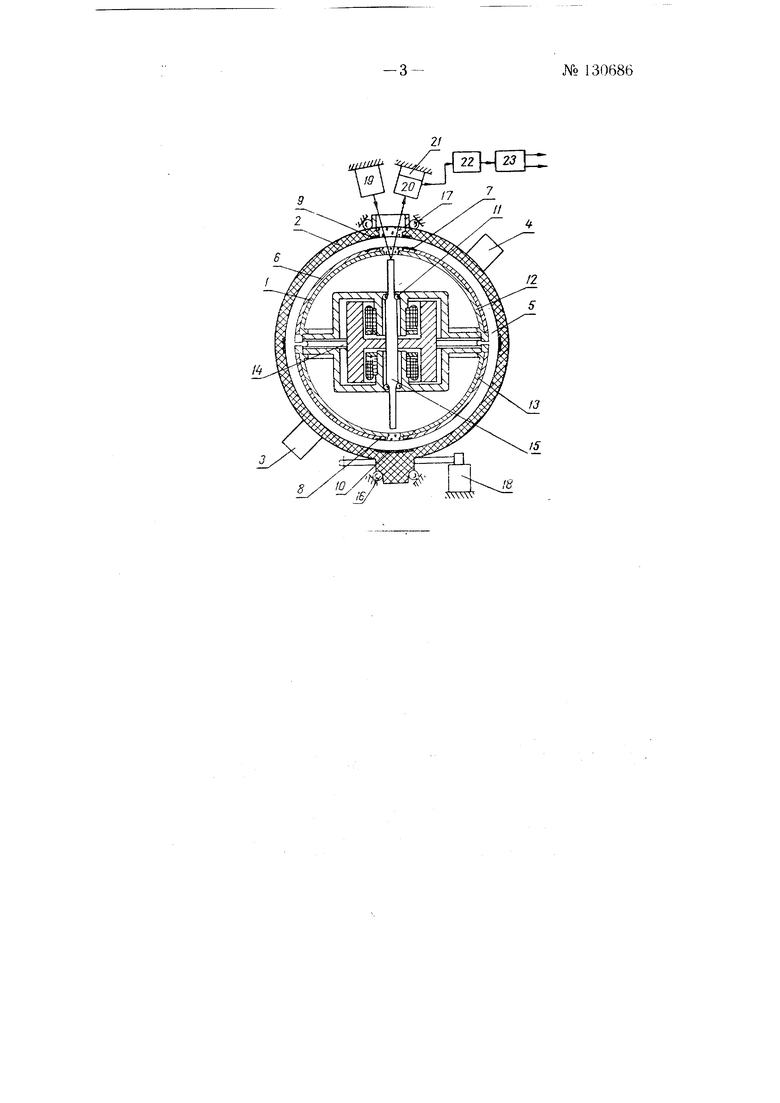
На чертеже приведена принципиальная схема гироскопа.
Имеется полый металлический шар 7, объем и вес которого подобраны так, что он полностью взвешен в жидкости и плавает в ней. Вследствие этого сухое трение обычных карданных иодвесов здесь заменяется жидкостным, а последнее при отсутствии скорости углового движения шара относительно кожуха 2 (что достигается с помощью системы индикации) практически равно нулю- Чтобы плавающий шар при наличии некоторой неуравповещенности не входил в соприкосновение с кожухом, на кожухе диаметрально по трем осям стабилизации установлено шесть электромагнитов, которые питаются от сети 40 в. 500 гц (на чертеже показаны только два электромагнита 3 и 4.
Переменное поле каждого из электромагнитов наводит в оболочке тара токи индукцин. В результате этого между шаром и электромагнитом возникают электродинамические силы, стремящиеся увеличить зазор между шаром и кожухом. Так как сила отталкивания электромагнита обратно пропорциональна квадрату величины зазора, то установленные электромагниты весьма точно удерживают шар в его центральном положении.
Внутри шара симметрично установлены два асинхронных двигателя с общим ротором, которые питаются трехфазным током, проходящим непосредственно через жидкость. С этой целью металлический шар с наружной стороны за исключением шарового пояса 5 весь покрыт слоем 6 изоляции и на нем укреплены два изолированных друг от друга и от шара токопроводящих сегмента 7 и S. Подобные сегменты и пояс имеются и на внутренней стороне кожуха. Две фазы тока раздельно подводятся
№ 130686--2к сегментам .9 и 10 кожуха, а далее через жидкость и сегменты шара к статорным обмоткам гиромоторов. Подобным образом, но только уже через шаровой пояс, подводится и третья фаза- Так непосредственно через жидкость без всяких проводов осуществляется питание гиромоторов.
С целью устранения дебаланса, возникающего из-за наличия люфтов в подшипниках ротора //, плавающий шар выполнен из двух полусфер 12 и 13, которые герметически соединены между собой кольцевым гофром 14 и имеют возможность перемещаться одна относительно другой вдоль оси ротора 15. Постоянно находясь под давлением жидкости, полушария прижимаются друг к другу и тем самым полностью устраняют люфт подшипников ротора, так как последние вмонтированы соответственно в первое и второе полушария.
Кожух 2 гироскопа устанавливается на подшипниках 16 и 17. С помощью малогабаритного двигателя 18 ему сообщается медленное вращение вокруг оси вращения самого ротора. Вследствие этого направление воздействия на гироскоп указанных моментов меняется в пространстве с круговой частотой вращения кожуха, и суммарный уход гироскопа от них становится равным нулю.
Гироскоп снабжен системой световой индикации положения, преимущество которой перед обычными системами заключается в высокой точности и отсутствии возмущающих моментов, налагаемых на гироскоп обычными электрическими датчиками. Луч света от источника 19 направляется на зеркально отполированный торец оси ротора 15- Отражаясь от последнего, луч попадает в объектив модулятора 20, где он модулируется и направляется на фотоэлемент 21, преобразующий световой сигнал в электрический. Полученный сигнал, усиленный усилителем 22, с помощью коммутатора 55 посылается на исполнительные устройства, которые поворачивагот платформу так, чтобы устранить возникшие рассогласования.
Пред м (J т н 3 о б 2 12 т с ь: и я
1.Гироскоп для инерциальиых систем с подвешенным в жидкости чувствительным элементом, статор которого питается током, проходящим через жидкость, отличающийся тем, что, с целью устранения разбалансировки ротора в процессе его работы из-за неравномерного износа шарикоподшипников, применена безлюфтовая подвеска ротора, шарикоподшипники которого постоянно находятся под действием постоянной силы давления жидкости через полушария оболочки статора.
2.Гироскоп но п. 1, о т л и ч а ю щи йся тем, что, с целью осуществления центровки подвеса внутреннего карданного кольца в жидкости, в нем применены электромагниты, закрепленные на кожухе и расположенные диаметрально по трем осям, удерживающие чувствительный элемент в среднем положении по осям стабилизации.
3.Гироскоп по пп- 1 и 2, от л и ч а ю щ и и с я тем, что, с целью устранения вредного влияния на ротор моментов внешних сил, вызванных возможной несимметричностью конструкции, кожух гироскопа выполнен вращающимся вокруг оси собственного вращения ротора, например, при помощи двигателя ДИД-0,5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1996 |
|
RU2119146C1 |
| РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1946 |
|
SU69371A1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| КАРДАННЫЙ ВАЛ ДЛЯ СОЕДИНЕНИЯ РОТОРА ВИНТОВОЙ ГЕРОТОРНОЙ ГИДРОМАШИНЫ СО ШПИНДЕЛЕМ | 2005 |
|
RU2285781C1 |
| МИКРОАВТОБУС (ВАРИАНТЫ) | 2006 |
|
RU2349485C2 |
| КАРДАННЫЙ ВАЛ ГИДРАВЛИЧЕСКОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2405903C1 |
| Гигроскопический компас | 1926 |
|
SU27660A1 |
| ГРАВИТАЦИОННЫЙ ИСТОЧНИК ЭНЕРГИИ | 1992 |
|
RU2046534C1 |
| ГРАВИТАЦИОННАЯ ГИДРОМАШИНА | 1996 |
|
RU2113363C1 |
| Винтовой забойный двигатель | 2003 |
|
RU2224079C1 |