Изобретение относится к области навигации, в частности к устройству гироскопа.
Известны конструкции двухстепенных гироскопов с магнитоэлектрическим двигателем [1]. Магнитоэлектрический двигатель используется в них только для создания собственного вращения ротора.
Наиболее близким техническим решением является трехстепенный гироскоп с шаровой опорой [2].
Недостатком этого гироскопа является наличие отдельных узлов двигателя и датчиков момента, что не позволяет создавать миниатюрные гироскопы в связи с тем, что в них нельзя разместить двигатель, датчики моментов и углов с приемлемыми параметрами.
Для устранения этого недостатка предлагается трехстепенный гироскоп с шаровой опорой и магнитоэлектрическим двигателем торцевого типа, в котором магнитоэлектрический двигатель одновременно выполняет роль датчика момента, при этом диаметрально расположенные катушки обесточенной половины статора магнитоэлектрического двигателя соединяются параллельно -встречно. Таким образом резко уменьшаются габариты гироскопа в связи с тем, что отсутствуют отдельные узлы датчиков момента со своими магнитами ротора и катушками статоров.
Конструкция предлагаемого гироскопа показана на фиг. 1.
Трехстепенный гироскоп содержит корпус 1, в цилиндрическую расточку которого запрессовываются крышки 2, имеющие обмотки статора 3 магнитоэлектрического двигателя и полусферическую выточку, являющуюся элементом (подшипником) газодинамической шаровой опоры. Крышки 2 крепятся между собой болтами 4. Между полусферическими выточками крышек 2 располагается шаровой шип 5 газодинамической опоры. Шаровой шип 5 жестко соединяется с маховиком 6 ротора, в цилиндрических расточках которого, расположенных по окружности, жестко укреплены постоянные магниты 7, имеющие намагниченность вдоль оси вращения ротора, при этом у соседних магнитов полярность противоположная.
В центральном отверстии шарового шипа 5, расположенном вдоль оси вращения, жестко закреплена трубка 8, в отверстии которой вклеен световод 9. Шип 5 с закрепленным на нем маховиком 6 с магнитами 7 является ротором гироскопа.
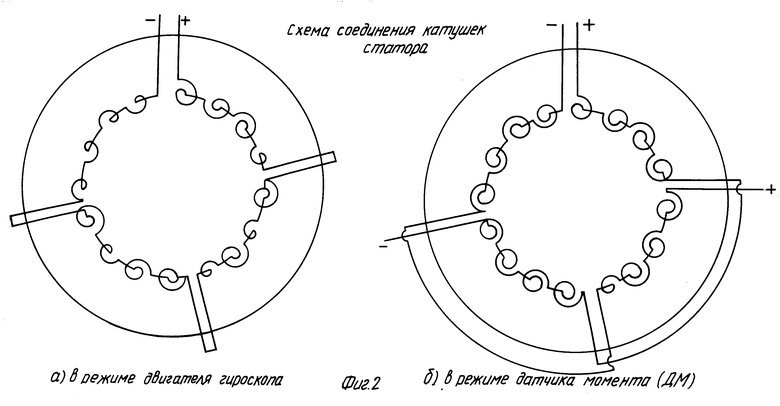
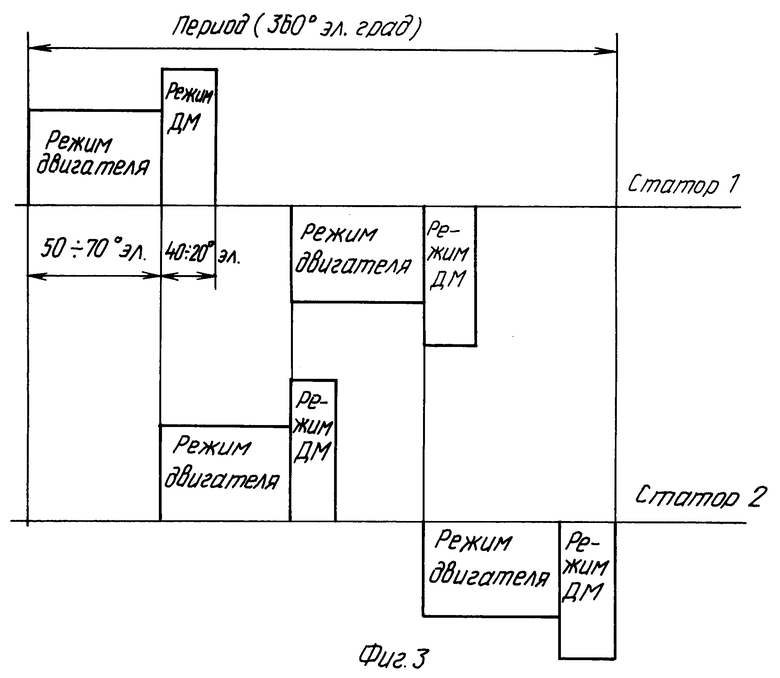
Трубка 8 одновременно выполняет роль ограничителя угла поворота ротора относительно крышек 2, поэтому наружные поверхности ее концов, входящих в центральное отверстие крышек 2, выполнены износостойкими. На внутренней поверхности одного из кожухов 10 напротив световода 9 жестко установлен светодиод 11, а на другом кожухе - фотодиод 12, которые совместно со световодом 9 являются элементами двухкоординатного датчика угла. Кожухи 10 вакуум-плотно соединяются с корпусом 1. Внутренний объем заполняется газом, который является смазкой газодинамической шаровой опоры. Питание на двигатель, датчик угла и вывод сигналов с него осуществляются через герметичные вводы 13. Катушки 3 совместно с крышками 2 сдвинуты друг относительно друга в окружном направлении на половину полюсного деления (центральный угол между магнитами 7). Датчиками момента служат магниты 7 и катушки 3 обесточенной в данный момент времени половины статора магнитоэлектрического двигателя, для чего блок управления двигателем (не входящий в состав гироскопа) переключает диаметрально расположенные катушки обесточенной половины статора параллельно-встречно. Схемы соединения катушек статора, работающего в режиме датчика момента, представлены на фиг. 2а, 2б, а временная токовая диаграмма - на фиг. 3.
Гироскоп работает следующим образом. При подаче напряжения попеременно на левую и правую половины 3 статора, соединенного по схеме фиг. 2а (программу переключения осуществляет специальный блок питания, не входящий в состав гироскопа), производится трогание ротора 5, 6. По мере увеличения частоты переключения половин 3 статора увеличивается скорость вращения ротора 5, 6. При достижении номинальной скорости вращения частота переключения половин 3 статора стабилизируется блоком питания.
Поскольку одновременно в качестве двигателя ротора работает только одна из половин 3 статора, то примерно половину периода другая его половина обесточена (см. фиг. 3). Блок питания в этот период времени переключает катушки 3 этой половины статора согласно фиг. 2б, образуя обмотки двухкоординатного датчика момента, в которые от усилителей обратной связи, не входящих в гироскоп, при необходимости подаются управляющие токи. Таким образом магнитоэлектрический двигатель одновременно выполняет функции двигателя гироскопа и датчика момента, при этом в последнем случае диаметрально расположенные катушки половины статора соединяются параллельно-встречно. Это связано с тем, что в режиме двигателя все магниты притягиваются к катушкам 3, создавая момент относительно оси вращения ротора, а в режиме датчика момента одни магниты притягиваются к катушкам 3, а диаметрально расположенные магниты должны отталкиваться от катушек 3, чтобы создать момент относительно осей, перпендикулярных оси вращения ротора.
Заявленное техническое решение дает возможность уменьшить габариты гироскопа, так как отпадает необходимость установки дополнительных магнитов и катушек собственно датчиков момента.
Таким образом заявленное техническое решение по сравнению с прототипом [2] за счет совмещения магнитоэлектрическим двигателем функции датчиков момента позволяет уменьшить габариты гироскопа и снизить его стоимость.
Литература
1. И. Ширер (I.Shearer). Оценка характеристик перспективного гироскопа при модуляции кинетического момента для точного определения азимута. Отчет фирмы "Ч.С.Дрейпер Лаборатори" США, январь-сентябрь 1981 г., Перевод СГ-708 ДСП, 1985 г, ЦНИИ "Дельфин".
2. Веннерхолм. Гироскоп со свободным ротором. " - Вопросы ракетной техники", N 7, 1967 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ГИРОСКОПА | 1996 |
|
RU2118795C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП С ШАРОВЫМ ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ | 2004 |
|
RU2264596C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ГИРОПЛАТФОРМЫ | 1996 |
|
RU2106601C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
Гироскоп предназначен для использования в навигации. В гироскопе с шаровой опорой ротора установлен магнитоэлектрический двигатель торцевого типа. Двигатель одновременно выполняет функцию двигателя и функцию датчика момента, при этом диаметрально расположенные катушки половины статора двигателя соединяются параллельно-встречно, что обеспечивает уменьшение габаритов гироскопа. 3 ил.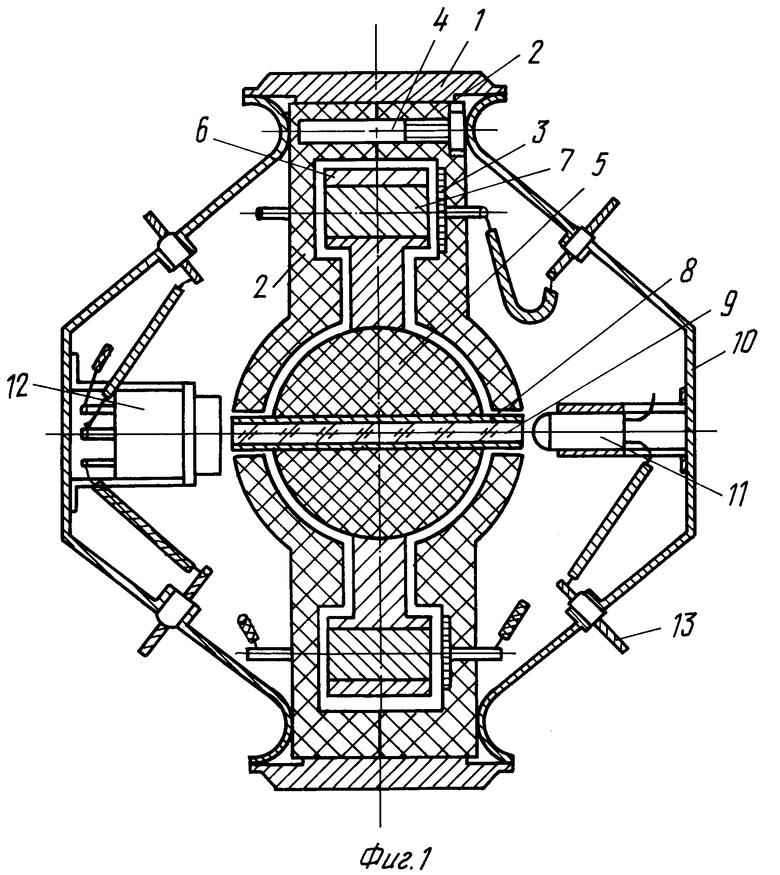
Трехстепенный гироскоп с шаровой опорой ротора и магнитоэлектрическим двигателем торцевого типа, отличающийся тем, что магнитоэлектрический двигатель одновременно выполняет функцию двигателя и функцию датчика момента, при этом в последнем случае диаметрально расположенные катушки половины статора магнитоэлектрического двигателя соединяются параллельно встречно.
| Моментный датчик для гироскопических приборов | 1961 |
|
SU145656A1 |
| Павлов В.А | |||
| Основы проектирования и расчета гироскопических приборов | |||
| - Л.: Судостроение, 1967, с.167 - 172 | |||
| Веннерхолм | |||
| Гироскоп со свободным ротором | |||
| - Вопросы ракетной техники, N 7, 1967. | |||

